遥控避障金属探测小车
2020-02-14 06:03朱浩洋解鸿林关诗文闫啸风徐翠艳
科技创新与应用 2020年2期
关键词:避障
朱浩洋 解鸿林 关诗文 闫啸风 徐翠艳

摘 要:本项目设计制作一个遥控避障金属探测小车,利用霍尔效应原理和毕奥-萨伐尔定律,实现遥控避障金属探测小车装置。采用小车和金属探测器两者结合的方式,实现遥控操纵小车探测金属,同时遇到障碍物小车自动躲避的功能。
关键词:避障;霍尔效应;金属探测器;遥控操纵
中图分类号:TM764.2 文献标志码:A 文章编号:2095-2945(2020)02-0039-02
Abstract: This project designs and makes a remote control obstacle avoidance metal detection trolley, using the principle of Hall Effect and Biot-Savart Law to realize the remote control obstacle avoidance metal detection trolley device. The combination of the trolley and the metal detector is used to realize the function of remotely operating the trolley to detect the metal and avoiding the car automatically when it encounters obstacles at the same time.
Keywords: obstacle avoidance; Hall Effect; metal detector; remote control
1 项目研究目的和意义
在我们日常生活中,各种自然灾害或者意外事故时有发生。对于灾后如何顺利救援,避免再次受害以及采取有效措施进行救援有着重要的意义。大学物理霍尔效应测磁场实验中,霍尔效应不但可以测定半导体材料参数,而且利用该效应能制成霍尔器件。霍尔器件具有结构简单、小型、频率响应宽(从直流到微波)、输出电压变化大、自然寿命长等优点。已被广泛用于非电量测量、自动控制和信息处理等方面。该装置主要是利用线性霍尔元器件,以单片机为核心,实现遥控避障金属探测小车。采用小车和金属探测器两者结合的方式,实现遥控操纵小车探测金属,同时遇到障碍物小车自动躲避的功能。主要运用领域包括军事侦察与环境检测、探测危险与排除险情,能体现现代科技的作用。
2 设计原理
主要是利用霍尔效应原理和毕奥-萨瓦尔定律,实现遥控避障金属探测小车装置。采用小车和金属探测器两者结合的方式,实现遙控操纵小车探测金属,同时遇到障碍物小车自动躲避的功能。
利用555定时器构成一个多谐振荡器,产生一频率为24kHz的脉冲信号,再通过共射极放大电路形成频率稳定度更高、功率较大的脉冲信号。将该信号输入到探测线圈中,使线圈周围产生恒定的交变磁场。由毕奥-萨伐尔定律可计算求得线圈中心轴线上某点的磁感应强度B。将霍尔元件置于该点。由于金属靠近时,会导致介质磁导率的变化或者由于金属的涡流效应削弱原磁场的作用,使霍尔元件上产生的电压与无金属产生的电压不同。霍尔元件输出电压经放大滤波后由单片机通过AD转换获得,将之与无金属获得电压进行对比,判断有无金属。
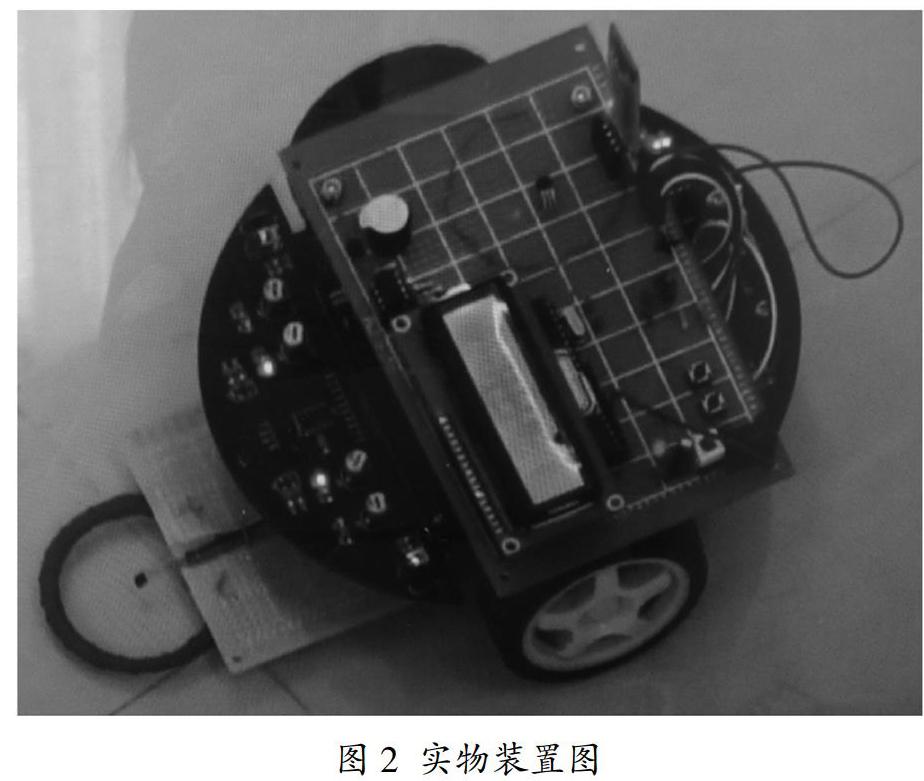
实验仪器与装置如图2所示。
3 实验方法
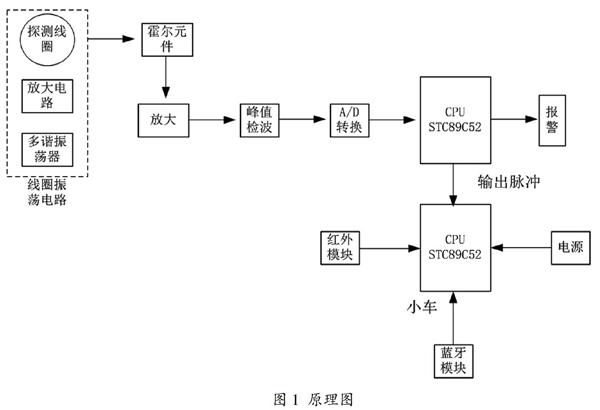
如图1整个装置是由线圈振荡电路、霍尔检测放大电路、AD转换电路、单片机处理电路以及小车控制电路组成。
线圈振荡电路由555定时器产生脉冲信号在探测线圈中产生一稳定的交变磁场,且该磁场在中心点的磁感应强度恒定,放置在该点的霍尔元件产生静态输出电压。
霍尔检测放大电路采用了线性霍尔传感器UGN3503,检测通电线圈周围磁场的变化。该传感器是依据霍尔效应(在一块半导体薄片上两端通以电流,并加上和薄片表面垂直的磁场B时,在薄片横向两侧会出现一个电压)制成的元件。由于该霍尔元件采集到的电压信号是一个毫伏级的信号,信号十分微弱,所以对其进行处理时需要进行放大并且需通过峰值检波和后级缓冲放大电路,将采集到的微弱信号放大至0-5V,以满足AD转换器所要求的输入电压变换范围。
AD转换电路选用了经济实用的ADC0809型A/D转换器来完成模数转换。ADC0809是8位逐次逼近型A/D转换器,片内有8路模拟开关,可对8路模拟电压量分时转换,转换速度为100us。
金属探测和小车控制单元采用STC公司生产STC89C52芯片。由于金属检测电路和小车是分立的,所以采用两块STC89C52芯片。当金属探测器探测到金属时,会在相应引脚输出一脉冲。小车控制单元通过中断检测这一脉冲以实现简单的信息传送。STC89C52是STC公司生产的一种低功耗、高性能CMOS8位微控制器,具有 8K字节系统可编程Flash存储器同时STC89C52使用经典的MCS-51内核,经济实用并且可用C语言编程。
4 数据测量与分析(表1)
在金属横截面积小于3.14cm2时,小车能够探测到,但是成功率较低,达到50%。金属横截面积大于6cm2时,小车探测成功率基本是100%,也就是金属障碍物横截面积越大越容易探测。
5 结论
该装置以单片机为核心,采用线性霍尔元件作为传感器,同时搭载在小车上,实现移动遥控探测同时兼具避障的效果,在生产生活实际中可大范围的应用。但是由于外界环境变量较多,导致该探测装置有稍微的误差。在以后的应用中可根据实际情况进一步改进,以实现大规模应用。
参考文献:
[1]邱忠媛,徐翠艳,等.大学物理实验[M].沈阳:东北大学出版社,2016.
[2]李世光,申梦茜,肖佳宜,等.新型无线遥控机器人控制系统设计[J].现代电子技术,2016(18):110-113.
[3]徐元文,张婧婧,陈宁.基于Arduino的无线环境探测小车的设计[J].计算机与现代化,2015(6):119-121+126.
猜你喜欢
农业科技与装备(2016年11期)2017-04-22
价值工程(2017年10期)2017-04-18
现代电子技术(2017年5期)2017-04-01
科学与财富(2016年34期)2017-03-23
中国新技术新产品(2017年2期)2017-01-20
科技创新与应用(2016年34期)2016-12-23
电子技术与软件工程(2016年20期)2016-12-21
中小企业管理与科技·中旬刊(2016年9期)2016-10-29
电脑知识与技术(2016年17期)2016-07-23
企业文化·中旬刊(2016年3期)2016-06-22