
基于HTTP/SOCKET的AGV与自动门通讯方法
2020-02-07 13:03高佳斌廖绵琴夏志华
物联网技术 2020年1期
高佳斌 廖绵琴 夏志华
摘 要:工厂厂区与仓库之间会安装隔离装置,常见的隔离装置为自动门,但自动门是独立个体存在,通常靠红外传感器和指纹开关控制开关门,自动门系统没有和第三方调度系统交互,当AGV通过自动门时由于高度不足或感应不到位,阻挡在门外,严重时甚至发生碰撞,形成物理障碍。文中方法是将AGV系统与自动门系统打通,AGV在行进过程中与自动门通信,申请开门动作并在通过后申请关门动作,将AGV调度系统与自动门控制系统融合成一个整体,使控制调度更加稳定可靠。
关键词:AGV;自动门;红外传感器;指纹开关;开关控制;控制系统
中图分类号:TP368.4文献标识码:A文章编号:2095-1302(2020)01-00-02
0 引 言
自动搬运机器人(Automated Guided Vehicle,AGV)广泛应用于消费电子生产制造行業,用于代替人工搬运,常与仓库管理系统结合。自动门作为区域之间的活动通道,常见的触发方式有红外触发方式与指纹识别触发方式。AGV的行驶与路线规划受远程控制系统RCS系统管控,行驶的过程中遇到自动门,由于AGV的高度与外观人不同,无法通过红外感应或是指纹识别的方式申请打开自动门,室内遇到自动门时无法顺利通行。
本文通过PLC的方案改造自动门触发线路,将自动门纳入UMS(United Management System,攸信自主研发联合管理系统,本文特指自动门控制模块)系统综合控制。打通远程控制系统(Remote Control System,RCS)与UMS系统完成AGV与自动门的通行协调工作。
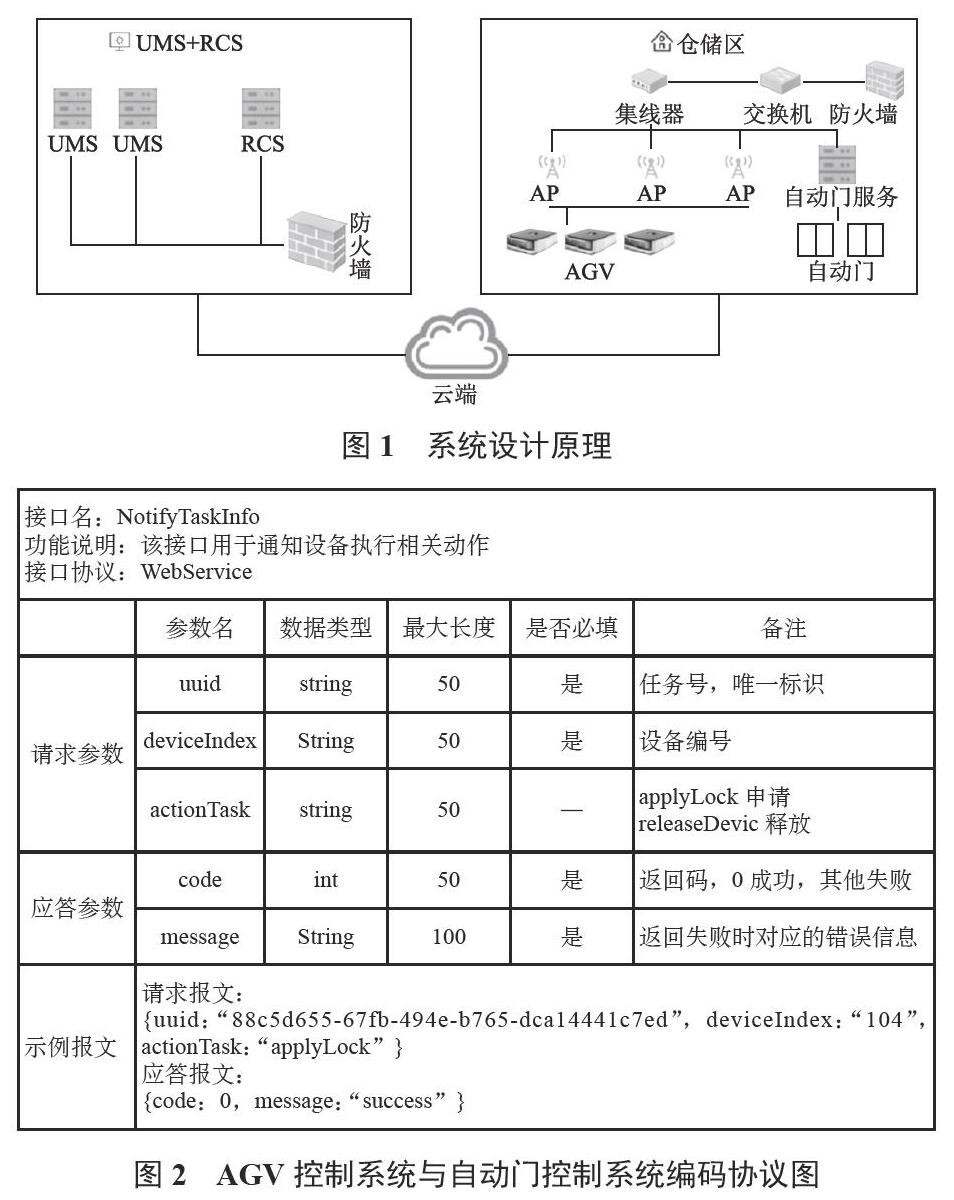
1 系统设计原理
RCS是AGV控制系统,与UMS系统一起部署在云端服务器形成内部网络,两者之间建立基于HTTP的API接口通信。自动门服务部署于厂区内网,控制厂区内所有自动门,同时与UMS系统互联互通。每扇自动门经过控制电路改造,由PLC发出控制门的开与关,并检测是否完全打开,PLC一端联通自动门服务,形成控制节点。系统设计原理如图1所示。
1.1 AGV控制系统与自动门控制系统编码协议
AGV控制系统与自动门控制系统编码协议图如图2所示。
通过Notify TaskInfo接口,允许RCS系统向UMS系统发出开门与关门请求,当UMS处理完一系列动作后,结果应答回RCS系统,若正常处理,则RCS将收到成功开门应答,转而通知AGV按照既定路线行径。也会存在异常情况,如请求超时、请求设备失败等,需要由RCS重新发出请求申请动作。
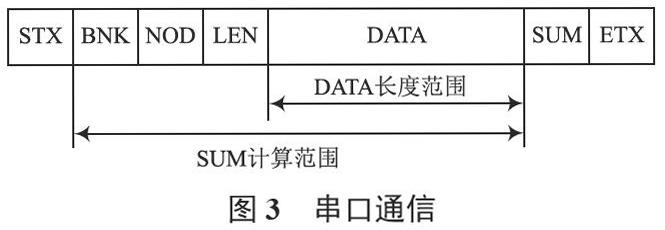
1.2 自动门控制系统与PLC编码协议
本系统支持串口通信与套接字通信。
串口通信设定:波特率9 600 b/s,1位起始位,8位数据位,1位奇偶校验位(无校验),1位停止位。
套接字方式:需要选用TCP,将PLC作为master,自动门服务作为slave,发送数据包时,设定为阻塞类型。
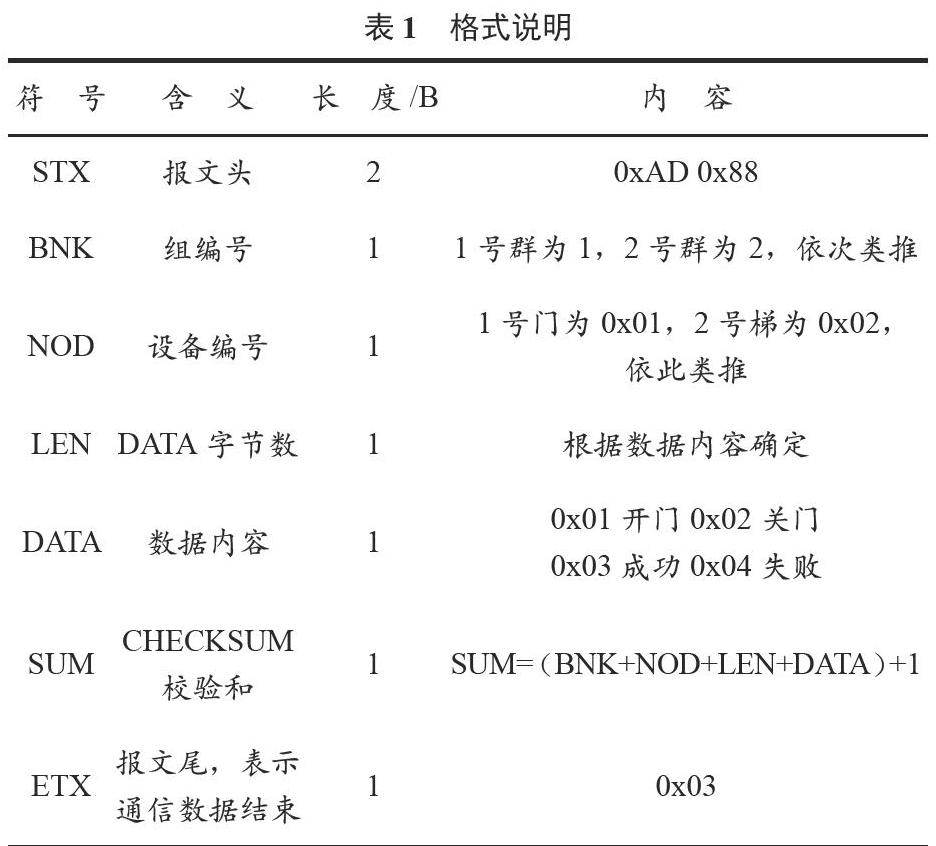
串口通信如图3所示。
格式说明见表1所列。
如上述开门申请,从UMS下达的指令为打开编号104的自动门,则编码后的请求数据包为 0xAD 0x88 0x01 0x68 0x01 0x01 0x6C 0x03,应答码为0xAD 0x88 0x01 0x68 0x01 0x03 0x6E 0x03。
1.3 PLC与自动门电路连接
PLC与自动门电路连接如图4所示。
PLC与自动门控制电路共地,PLC的GPIO口与自动门控制线连接,当GPIO输出低电平信号时,自动门电机驱动门缓慢打开,直至完成开门;当GPIO输出高电平信号时,自动门电机驱动门缓慢关闭,直至完成关门。
1.4 通信控制时序
通信控制时序如图5所示。
当AGV行径到自动门设定区域时,向RCS系统申请开门,RCS系统将协议编码后向UMS系统发出请求,UMS解码后将请求转发到自动门服务上申请控制指定PLC,最终由PLC控制自动门打开。
当自动门打开完全时,会触发光电开关,PLC检测到光电开关被触发,向自动门服务发出开门应答,自动门服务收到应答后转向UMS系统,最终UMS系统通过接口回执给RCS系统,RCS系统通知小车可以行径。
PLC与自动门的运行过程如图6所示。
2 结 语
通过本文设计能够将AGV行径路线中的“障碍”变成控制系统中的一部分,保证AGV在行径过程中的稳定性、安全性,有效地替代人工配送的同时,也不破坏厂区内的安全设施。
参 考 文 献
[1]深圳市欧铠智能机器人股份有限公司.AGV进出电梯控制系统原理[EB/OL].[2018-09-26].http://www.okagv.com/jishu_14432765.html.
[2]贺用佳.基于PLC的自动门控制系统方案说明书[D].长沙:长沙航空职业技术学院,2017.
[3]西朗门业(苏州)有限公司.AGV小车与快速门(自动门)通信方案[EB/OL].[2019-08-16].http://www.afzhan.com/tech_news/detail/317772.html.
[4] STEVENS W R.UNIX网络编程(卷1):套接字联网API [M].3版.北京:人民邮电出版社,2019.
[5]高吉祥.模拟电子技术[M].2版.北京:电子工业出版社,2007.
[6] GOURLEY David, TOTTY Brian. HTTP:The Definitive Guide [M]. 陈娟,译.北京:人民邮电出版社,2012.
[7]深圳佳顺伟业.AGV系统的安全考虑[EB/OL]. [2018-07-01].https://wenku.baidu.com/view/5a34e0e38bd63186bdebbc1d.html.
[8]黄朝阳,乔晓利.基于激光跟踪测量的机器人定位研究[J].激光杂志,2018(12):121-124.
[9]李振宇.基于IMU和红外传感器网络的室内人体定位方法[J].传感器与微系统,2018(12):24-27.
[10]苗嘉轩.基于学生宿舍的智能家居传感器系统设计[J].通讯世界,2018(11):273-275.
猜你喜欢
科学与财富(2021年36期)2021-05-10
电子测试(2017年12期)2017-12-18
考试周刊(2016年88期)2016-11-24
新教育时代电子杂志(学生版)(2015年31期)2015-12-20
机电信息(2014年35期)2014-02-27
电子设计工程(2014年20期)2014-02-27
