
目标区域局部特征和局部图像质量相结合的激光干扰效果评估*
2020-02-07 12:58孙晓泉
国防科技大学学报 2020年1期
孙 可,叶 庆,孙晓泉
(1. 国防科技大学 脉冲功率激光技术国家重点实验室, 安徽 合肥 230037;2. 国防科技大学 先进激光技术安徽省实验室, 安徽 合肥 230037)
光电成像系统激光干扰效果评估是光电对抗研究的重要环节,是全面评估激光干扰系统战术性能的关键步骤[1-2]。为了能够定量、客观分析评估光电成像系统的激光干扰效果,需要确定相应的评估指标。激光干扰图像的一个显著的特征是图像质量的下降。因此,一些研究者从图像质量的角度,选择图像的饱和像元数[3]、信噪比[3]、光谱图像熵[4]、均方误差[5]、相关系数[6]、图像结构相似度指数[7]等基于图像灰度值的统计特征作为评估指标,对比分析干扰前后上述指标的变化,据此评估干扰效果。
然而,上述评估指标在量化过程中大多以整幅图像作为研究对象,评估指标最终反映的是激光干扰导致的整幅图像质量的下降程度。但干扰光电成像系统主要是通过激光光斑的饱和覆盖作用,阻止观察者(可以是人也可以是机器)准确地获取图像中的目标信息[8]。光斑引起的饱和区域主要集中在某一区域,造成图像局部质量严重下降,而远离这一区域的图像受到的干扰相对较小。因此,基于图像的整体质量的评估指标不能反映激光光斑的局部覆盖效应,需要针对目标区域内的局部图像质量建立评估指标。
除局部图像质量严重下降外,激光光斑的覆盖还导致基于图像特征点匹配的目标检测和识别任务无法实现[9-10]。所谓图像特征点,是一些能够反映图像局部重要特征的像素点,比如灰度变化剧烈的边缘点(edges)或者角点(corners)、多个特征点组成的团簇(blobs)以及目标中具有狭长结构的脊点(ridges)等,常被广泛应用于物体检测和识别、目标匹配尤其是精确制导武器的目标匹配和图像自动寻的制导等领域[11]。目标被激光光斑覆盖势必会造成目标区域局部特征的明显变化,进而导致能够成功匹配的特征点数量大幅降低,最终影响目标识别的成功率。因此,特征点数量的变化能够反映干扰对目标区域局部特征的影响。
为此,本文提出目标区域局部特征和局部图像质量相结合的激光干扰效果评估方法。采用SURF(speeded up robust features)特征点检测和匹配算法选取特征点,并从原始图像和干扰图像中匹配出目标图像。分析激光干扰对特征点提取和目标匹配的影响,选择目标区域内局部特征点数、光斑饱和面积以及局部结构相似度3个参数的乘积作为评估指标,用于评估干扰效果。
1 SURF算法及激光干扰对该算法的影响
1.1 SURF算法
SURF算法是目前较为常用的目标特征提取和匹配算法,具有高效、稳定的特性,可用于目标识别和跟踪锁定等需要实时运算的场景[11]。
SURF算法的基本思想源于著名的SIFT(scale invariant feature transform)算法,但是在特征点搜索、邻近特征描述以及描述子匹配方面采用快速近似的方法,使得SURF算法的执行效率和稳定性要好于SIFT算法。例如在特征点搜索方面,SURF算法采用方形滤波器(box filter)取代SIFT算法中的高斯滤波器,并借助积分图像的概念,将图像与高斯微分模板的卷积操作转化为对积分图像的加减运算,从而提高了运算速度。关于SURF算法的详细论述见文献[11]。
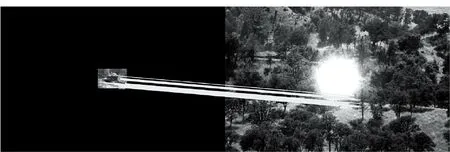
为了使研究对象更接近战场实际环境,选取荷兰TNO研究所发布的The search-2图像数据库。该数据库包括44幅含有9种实际军事目标的高分辨自然场景数字图像[12]。该数据库的主要目的是评估和验证各种数字图像的尺度(digital metrics)和人眼在复杂场景下搜索目标的模型有效性。但是,鉴于其贴近实际战场环境的复杂场景以及各种真实军事目标在场景中的隐蔽状态,仍将其用作激光干扰效果评估的背景图像。图1(a)给出了数据库中的第9幅图像,其中一辆M60坦克隐蔽在复杂的丛林中。利用SURF算法对该图像中的目标进行特征点匹配时,首先选中场景图像中包含目标的矩形区域作为目标模板,如图1(b)所示。目标区域是指,以实际目标(即图中坦克)的中心为中心的矩形,其内部包含的像素数是实际目标所含像素数的2倍。然后,运用SURF算法分别对场景图像和目标模板进行特征点检测,分别如图1(c)和图1(d)所示。其中圆圈的直径表示不同提取尺度,圆圈的圆心为特征点位置。不难看出,坦克目标的特征点主要集中在坦克上半部,是区别于周围环境最显著的那些像素点。进一步,将两幅图片中的特征点进行匹配,就能够在场景图像中的识别目标,如图1(e)和图1(f)所示。
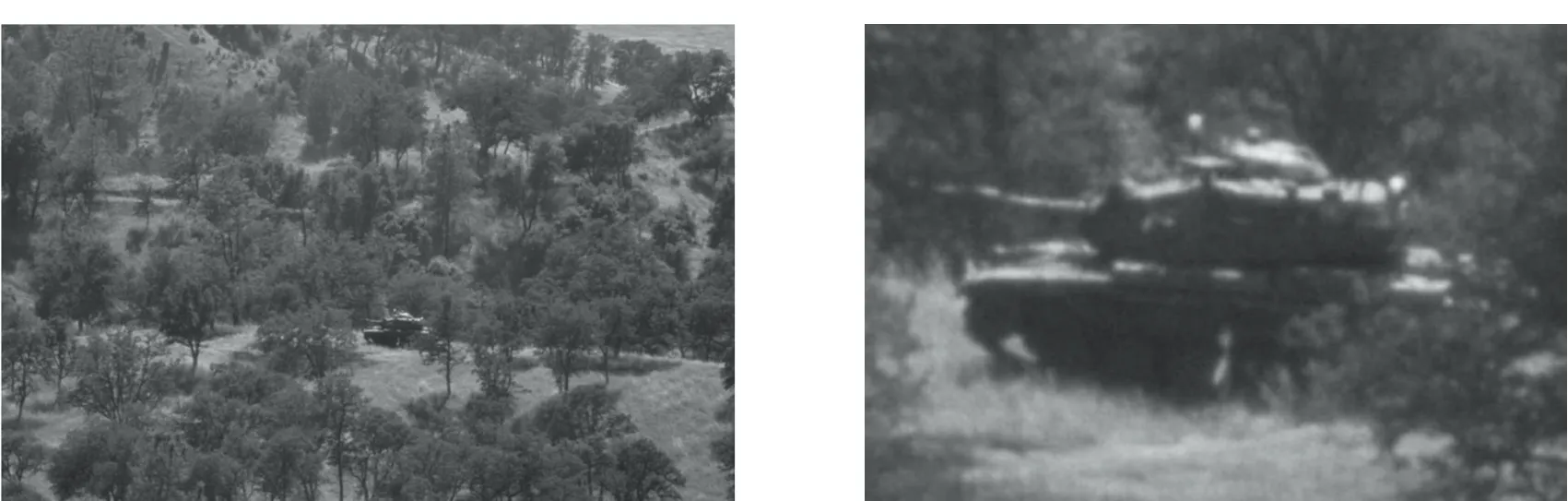
(a) 场景图像(a) Scene image (b) 目标图像(放大)(b) Target image(enlarged)
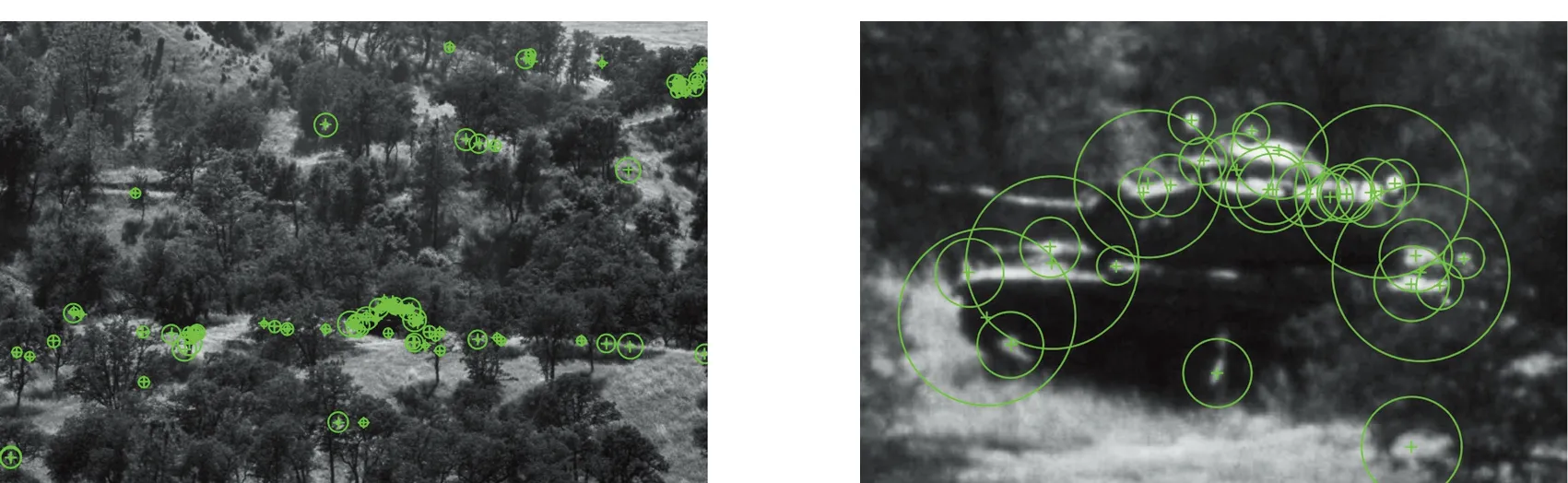
(c) 场景图像中部分SURF特征点(c) Some SURF feature points in scene image (d) 目标图像中部分SURF特征点(d) Some SURF feature points in target image
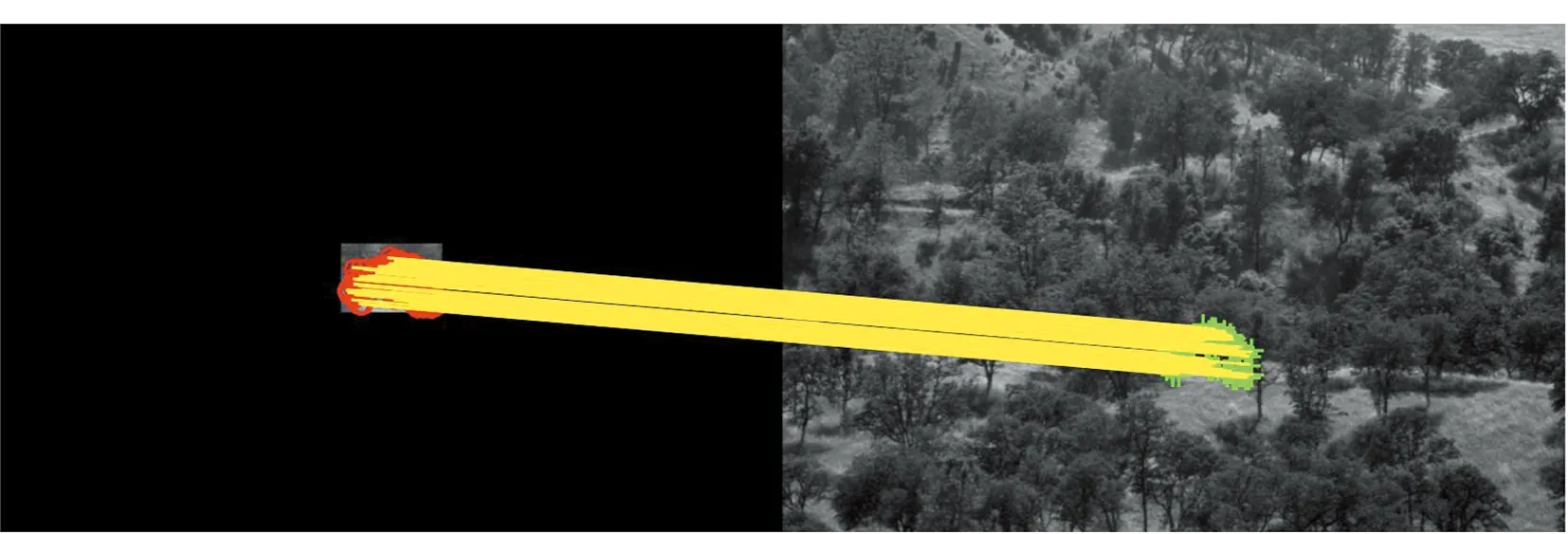
(e) 目标图像与场景图像间特征点匹配(e) Feature points matching between target image and scene image
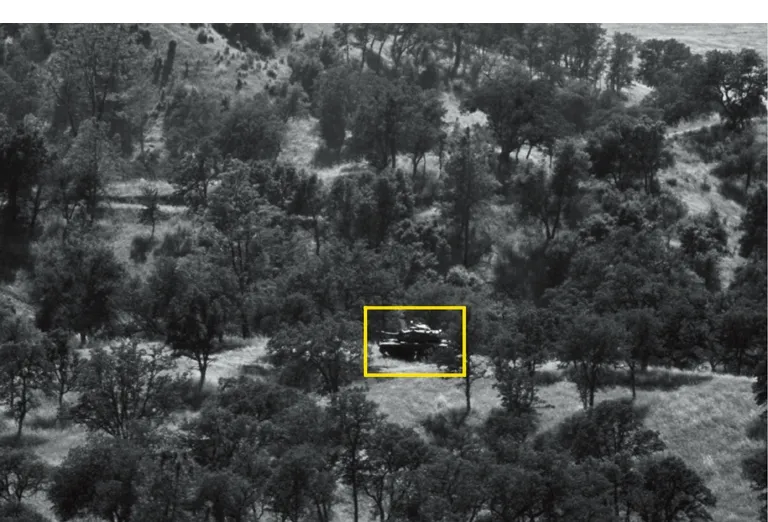
(f) 目标识别(f) Target recognition图1 基于SURF特征点匹配的目标识别Fig.1 Target recognition utilizing SURF feature points matching
1.2 激光干扰对SURF算法的影响
激光干扰使得场景图像叠加一定面积的饱和区域,导致SURF算法无法在该区域内提取特征点。如果饱和区域覆盖部分目标区域,目标区域内能够提取到的特征点数将会减少甚至为零,进而影响后面的特征点匹配过程。
为了方便有效地验证本文的评估方法,根据文献[13]的数值计算方式模拟图像中饱和区域大小随干扰激光功率密度的变化规律。干扰激光在图像中形成的光斑就是入射激光经过成像系统入瞳衍射后在其焦平面形成的光强分布。首先,根据入瞳衍射光强分布理论表达式计算得到不同入射功率密度在焦平面上产生的衍射光强分布,将其与探测器饱和阈值相比较,即可得到探测器表面入射光强高于探测器饱和阈值的区域——饱和区域,该区域的尺寸可以用饱和半径描述;然后,在场景图像中,人为地以感兴趣的位置为中心(即入射激光光斑中心在图像中的位置),将饱和半径内像素的灰度值均改为255(也可选择其他与实际相符的数值,比如245)。此时得到的图像可以近似看成是某一入射功率的激光在图像中产生的饱和干扰图像。该方法可以方便地模拟不同入射功率或者某一入射功率不同入射位置的激光对场景图像的干扰。图2给出了不同激光干扰对SURF算法识别目标的影响。其中,图2(a)的激光强度比图2(b)低,激光光斑覆盖了目标区域约3/4的范围,而图2(b)中激光光斑几乎覆盖了整个目标区域。显然,干扰激光饱和光斑的覆盖使得两图中能够提取出的特征点个数远小于未受激光干扰时的个数。尽管如此,图2(a)中仍有部分特征点能够匹配,并准确地实现目标识别,如图2(c)所示。而图2(b)中匹配的特征点个数过少,无法识别目标,如图2(d)所示。此外,激光干扰已经使得观察者无法准确识别图2(c)中的目标属性,但是SURF算法仍能以较小的干扰程度准确实现目标识别,这说明激光干扰对人眼观察有效,对机器算法有时可能无效,有必要针对机器算法进一步建立符合实际的评估方法。
(a) 激光光斑部分掩盖目标时SURF算法仍能准确匹配部分特征点(a) Accurate feature point matching for SURF algorithm with partial covered target in scene image
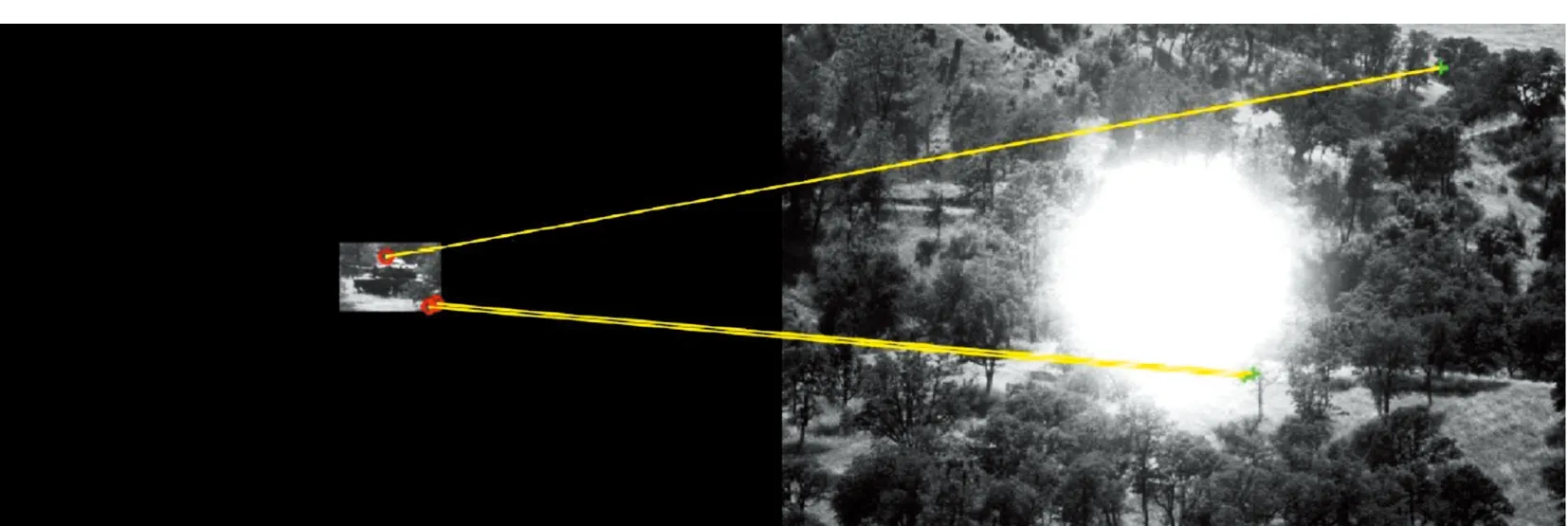
(b) 激光光斑几乎掩盖目标时SURF算法不能在特征点较少的情况下匹配特征点(b) Inaccurate feature point matching for SURF algorithm with most covered target in scene image
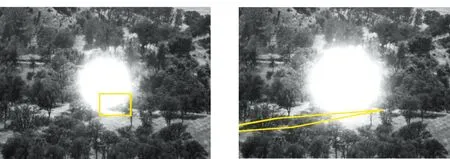
(c) 图(a)目标识别成功(c) Successful recognition in Fig.(a) (d) 图(b)目标识别失败(d) Failed recognition in Fig.(b)图2 不同功率密度激光对SURF算法识别目标的影响Fig.2 Influence of laser with various intensity to target identification by SURF algorithm
2 基于局部特征与图像质量相结合的评估方法
如前所述,在评价基于特征点匹配算法的激光干扰效果时,需要考虑目标是否被激光光斑覆盖,以及覆盖引起的特征点数的变化。此外,还需要考虑饱和光斑会引起目标区域局部图像质量下降。因此,提出一种目标区域内局部特征和图像质量相结合的评估方法ITF-SSIM(in-target-features structural similarity)方法。该方法的评估指标为:
ITF-SSIM=[1-A(x,y)]·N(x,y)·SSIM
(1)
式中:x、y分别表示激光干扰前、后的图像;A(x,y)=A(y)/A(x),描述目标区域内饱和光斑面积占目标区域面积的比例,其中A(x)、A(y)分别表示目标区域的像素总数以及目标区域内饱和光斑包含的像素数,因此1-A(x,y)表示未饱和区域面积比例,当饱和区域距离目标区域较远时,目标区域内没有像素饱和,1-A(x,y)=1表示饱和区域对目标区域成像质量没有影响;N(x,y)=N(y)/N(x)描述目标区域内特征点数目的变化情况,其中N(x)、N(y)分别表示干扰前、后目标区域内能够准确提取的特征点的数目,当饱和区域远离目标区域时,特征点提取不受影响,N(x)=N(y),N(x,y)=1;而结构相似度指数的具体表达式[14-15]为:
SSIM=[l(x,y)]α·[c(x,y)]β·[s(x,y)]γ
(2)
该指数利用不同图像间像素亮度、对比度以及结构信息的相关性客观评价图像质量。式中,l(x,y)、c(x,y)、s(x,y)分别表示激光干扰前后目标区域的亮度比较函数、对比度比较函数和结构比较函数。它们的表达式分别为:
(3)
(4)
(5)
为了避免出现分母为零的情况,设置了3个非零常数C1、C2、C3。其中,μx、μy分别为激光干扰前、后目标区域的图像灰度均值,σx、σy分别为激光干扰前、后的图像灰度标准差,σxy为激光干扰前后目标区域图像灰度的协方差。式(2)中,α、β、γ是权重参数,用于调整3个相似性参数的相对重要性,通常取α=β=γ=1。
由式(1)不难看出,如果目标区域没有受到激光干扰(尽管有激光入射,但是此时光斑没有进入目标区域),则目标区域内饱和面积为0(1-A(x,y)=1),特征点数目不变(N(x,y)=1),图像与目标模板相同(SSIM=1),则ITF-SSIM=1说明干扰没有效果。反之,如果激光光斑进入了目标区域,则[1-A(x,y)]、N(x,y)、SSIM三者均小于1,因ITF-SSIM<1,说明干扰有效果。可见,ITF-SSIM反映了干扰效果的大小,其值越小,干扰效果越好。
ITF-SSIM算法的实现可分为3个步骤。
步骤1:在激光干扰前,选择场景图像中的目标区域x计算目标区域的像素总数A(x);使用SURF算法提取特征点,统计能够从场景中准确匹配目标图像特征点的数目N(x)。
步骤2:在激光干扰后,使用SURF算法提取特征点,确定干扰后的目标区域y,统计能够从场景中准确匹配目标图像特征点的数目N(y)以及目标区域内饱和像素数A(y)。
步骤3:分别计算干扰前后的l(x,y)、c(x,y)、s(x,y),将得到的各项参数代入式(1),得到ITF-SSIM指标。
图3给出了ITF-SSIM评估指标随入射激光功率以及光斑中心和目标中心相对距离的变化规律,并与目标区域内单独使用SSIM作为评估指标进行对比。需要指出的是,焦平面上的光强分布与入射光功率、光学系统入瞳直径、焦距和焦平面器件饱和功率密度阈值等参数相关。这里为了显示上述两种评估指标随入射功率的变化情况,对入射功率采取了类似归一化的处理,其具体数值并不具有实际意义。
图3(a)为光斑中心与目标中心的距离不变时(两中心距离405像素,目标区域尺寸为360像素×530像素),ITF-SSIM和SSIM指标随入射功率的变化;图3(b)为入射功率固定时(此时饱和区域半径为375像素),光斑中心与目标中心的距离对ITF-SSIM和SSIM指标的影响。可以看出,无论是入射功率的增加还是相对距离的变化,ITF-SSIM与SSIM指标均呈现相同的变化趋势。但是,两种情况对应的SSIM指标的变化范围均是在[0.4,1],比ITF-SSIM指标的变化范围要小50%。这表明,相比于针对目标区域单独使用SSIM作为评估指标,局部特征使得ITF-SSIM指标能够反映干扰图像变化的丰富层次,揭示干扰过程的丰富细节,有利于干扰效果的评价。
此外,ITF-SSIM比SSIM指标呈现更加明显的非线性饱和趋势。当入射功率大于60或者相对距离小于300像素时,激光光斑几乎覆盖了整个目标区域,匹配的特征点数和未饱和区域的面积几乎为0,ITF-SSIM指标取值接近于0。而SSIM指标没有涉及目标的局部特征,因此对激光的覆盖效应很不敏感,不利于干扰效果评估。
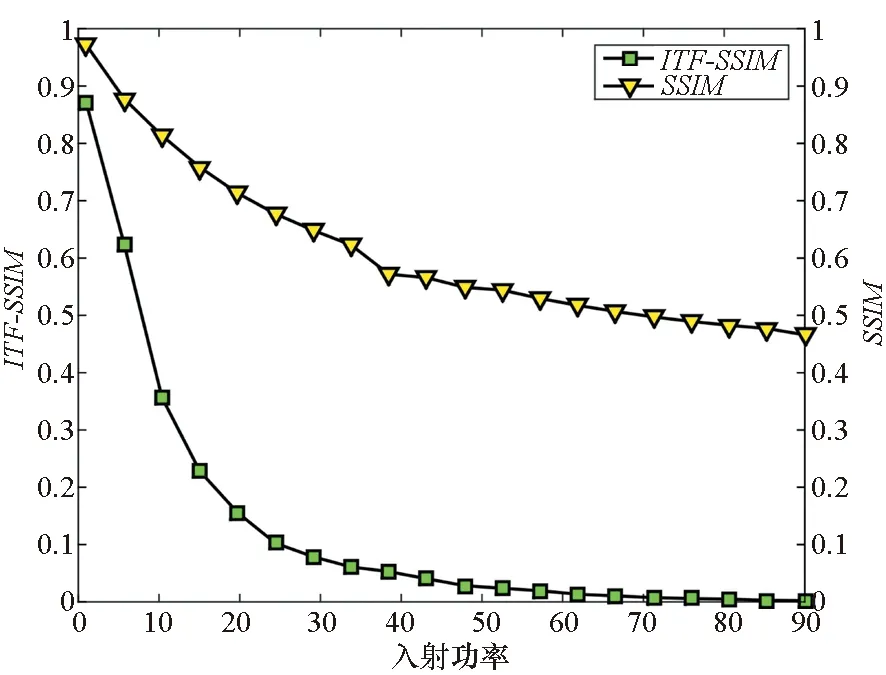
(a) 光斑位置不变时ITF-SSIM和SSIM随入射激光功率的变化(a) ITF-SSIM and SSIM for different incident power with the identical location of the laser spot
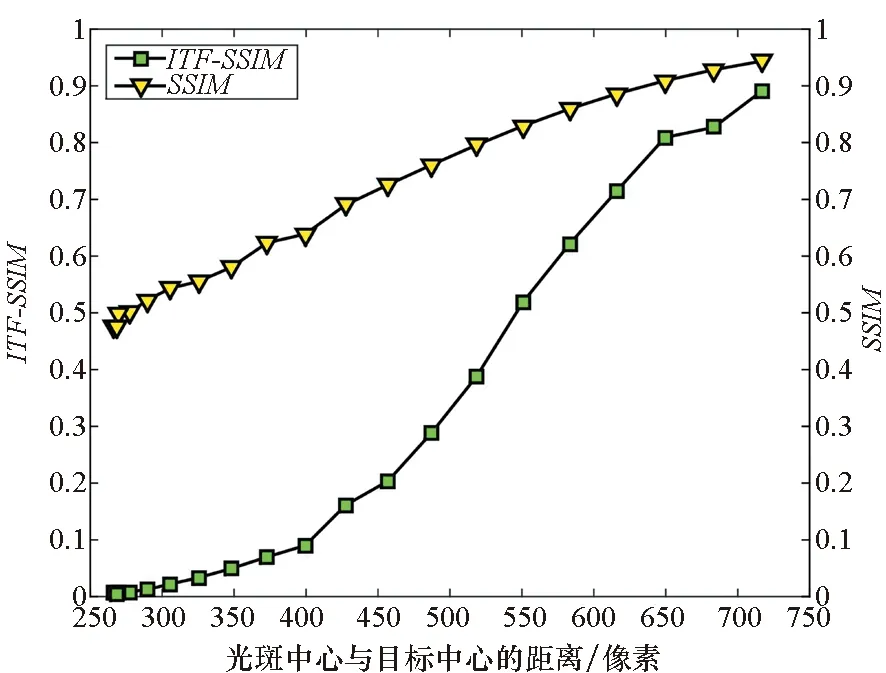
(b) 入射激光功率不变时ITF-SSIM和SSIM随光斑位置的变化(b) ITF-SSIM and SSIM for different location of laser spot with the identical incident laser power图3 ITF-SSIM与SSIM的比较Fig.3 Comparison of ITF-SSIM and SSIM
3 结论
为了客观地反映光电成像系统的激光干扰效果,提出了目标区域内局部特征和图像质量的干扰效果评估方法ITF-SSIM。该方法首先利用SURF算法在场景中确定目标区域,然后计算激光干扰前后目标区域内特征点数目、饱和区域面积以及图像质量指标SSIM的变化,并将三者的乘积作为最终评估指标ITF-SSIM。该指标的取值范围为[0, 1],其值越小,说明干扰效果越好。不同入射激光功率与不同光斑位置的干扰模拟表明:与单独使用SSIM指标相比,局部特征使得ITF-SSIM指标具有较大的变化范围和明显的非线性变化特征,能够反映激光干扰过程的丰富细节。因此,ITF-SSIM指标更加适用于激光干扰效果的评估。
猜你喜欢
中学生数理化·中考版(2022年9期)2022-10-25
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
阅读(高年级)(2019年9期)2019-11-15
阅读与作文(小学高年级版)(2019年8期)2019-10-16
小资CHIC!ELEGANCE(2019年28期)2019-09-12
当代陕西(2019年10期)2019-06-03
小哥白尼(趣味科学)(2019年2期)2019-04-17
数学小灵通·3-4年级(2017年9期)2017-10-13
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
