
基于数据中心的SLAM技术研究
2020-02-04 06:33赵霖
电子技术与软件工程 2020年21期
赵霖
(福建榕基软件股份有限公司 福建省福州市 350001)
随着云计算、大数据和物联网等新技术的大规模使用,必须建立科学的数据中心,随着数据中心设备越来越多,环境越来越复杂,为了发挥数据中心的价值,以往的人工运维结合传统DCIM(Data Center Infrastructure Management)的方式已经无法满足新时代业务的需求,必须建立起更新、更实时、更高效的可视化DCIM 系统。
本文提出通过基于SLAM 技术的思路来解决数据中心可视化管理问题,做到高频更新数据中心现场实际情况,高精度呈现数据中心内物理环境,并通过开放的数据接口与现有各类信息系统对接,将实时化、具象化的场景与实时数据相结合,灵活展现数据中心运行环境、设备资产和各类报警信息,大大提高数据中心运维效率。
1 数据中心的SLAM模式设计
1.1 SLAM技术
SLAM 技术,即Simultaneous Localization And Mapping,时定位与地图构建,或并发建图与定位技术。它是利用感知设备在未知环境中的未知位置进行移动,并且在设备移动过程中实现对应环境的完全地图描绘的一种技术方法。值得注意的是,SLAM 技术在具体应用中的功能结构,主要包括特征提取以及数据关联、状态估计与更新、特征更新等,而完全地图则使得感知设备能够不受障碍影响的进入到所在环境的的各开放角落[1]。
SLAM 涉及一系列复杂的计算和算法,它们利用传感器来构建未知环境中的地图和结构,并定位设备的位置和方向。从技术角度来看,SLAM 本质上是一种估算设备位置和方向的过程,并使用摄像头输入馈送和IMU 读数来构建环境映射,能够在未知环境中确定设备的准确位置。SLAM 技术在构图过程中能够通过图优化方式实现,它不仅能够对百万平米级别的地图进行构建实现,而且具有主动式回环闭合的纠正能力,在构图过程中根据感知设备的环境探索情况,对已经探索的环境能够根据其内部拓扑图实现主动式闭环检测,并且在感知设备实现新的环境感知和闭环信息检测发现后,该技术就会利用相应的计算方法在实现原有环境及其位姿拓扑地图修正基础上,来满足闭环后地图的有效修正和图优化功能需求,实现更加准确和可靠的环境建图。
在SLAM 技术中包含了激光SLAM 与视觉SLAM 两大类,其中激光SLAM 是目前应用最广泛也最为成熟的SLAM 技术,激光雷达的出现使得测量更快更精准,信息也更为丰富。
SLAM 技术在实际应用中不仅具有较为成熟的理论基础支持,而且其应用价值十分显著,在现有的技术研究和应用领域被称为是能够真正实现感知设备完全自主移动的关键技术。值得注意的是,SLAM 还存在很大的提高余地,在具体实践中,由于SLAM 技术在实际应用中的运行环境会受到时间与技术条件等因素影响,像SLAM 技术应用中的走廊问题和外界干扰因素影响等,这就需要在具体应用中针对SLAM 技术的灵敏性和可靠性进行完善和提升,即通过对现存问题进行优化改进,以促进数据中心的发展。
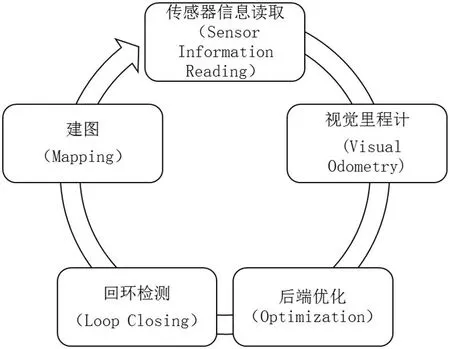
图1:SLAM 主要过程图
1.2 SLAM过程分析
SLAM 技术在实际应用中的具体分析过程主要包含以下几点,如图1所示。
(1)传感器信息读取(Sensor Information Reading)。在视觉SLAM 中主要为激光雷达、罗盘、倾角传感器等各类感知设备所采集信息的有效读取与预处理。
(2)视觉里程计(Visual Odometry)。VO 也被称为是前端,即FE(Front End),它的主要任务是进行相邻图像之间的相机运动与对局部地图样子估算实现,是SLAM 技术应用主要环节与重要内容过程之一。
(3)后端优化(Optimization)。在SLAM 的技术系统构成中,后端是进行不同时刻的视觉里程计所测量相机位姿接受的重要部分,同时也是进行SLAM 技术应用中的回环信息接受的重要系统部分,因此,对后端的优化实现,能够实现具有全局一致性的相机运动轨迹与地图获取。值得注意的是,SLAM 技术系统中,根据后端被连接在VO 之后等情况,因此也被称为是后端,即Back End。
(4)回环检测(Loop Closing),它作为SLAM 技术系统的重要过程之一,是对机器人是否曾到达过原先位置等情况进行检测和判断,在SLAM 技术应用中,对检测出的回环信息,会向后端进行传输并进行有效处理。
(5)建图(Mapping),是SLAM 技术系统的最终环节,一般情况下,是通过对所估计的轨迹进行应用,进行和任务要求相对应的地图建立实现。
2 数据中心SLAM模式下DCIM设计
2.1 DCIM总体结构
DCIM 在数据中心中的应用十分重要。DCIM 可对数据中心资产设备,资源设备运行状况的进行全面监控和管理。DCIM 提供一个独立的管理平台,对各个数据中心IT 设备和基础设施进行实时监控和管理。通过采集设备、传输设备和管理设备等,与可视化平台对接,对数据中心资产设备和场地基础设施进行统一监控、科学管理、全方位展示。[2]按其罗辑架构设计为DAL(Data Acquisition Layer)、CPL(Centralized Processing Layer)、MSL(Management Service Layer)和DL(Display Layer)。
DCIM 的DAL 设计为系统的数据入口,是系统管理所需基础设施数据的来源,包括SLAM、RFID、ITI、Video 等子模块,均通过标准接口及协议,接收前端系统的采集数据。CPL 具备集中数据处理能力,对采集数据进行二次计算,形成上层管理所需的数据。MSL 提供以下服务:基础设施监控、能效管理、机房可用性监控、资产管理、容量管理、变更管理、报表报告、告警告知、配置管理等各项服务。随着数据中心管理成熟度的提高,以增加对应功能模块的方式拓展系统的管理功能,以满足数据中心的管理需要,比如拓展增加工单管理、巡检管理等模块。DL 提供丰富的展示媒介,包括移动终端、PC、大屏等方式,与VP 可视化平台对接,对数据中心资产设备和场地基础设施进行统一监控、科学管理、全方位展示。随着应用设备的发展,根据应用需要,在应用层增加对应展示应用模块。
2.2 SLAM设计
SLAM 在DCIM 总体设计中主要为子模块,其具备定位功能与地图构建功能,将数据中心的各个机房现场环境应用到DCIM 平台中,可以有效为DCIM 提供基础环境数据。在SLAM 子模块中,与DCIM 平台的数据采集层数据入口对接,通过提供标准接口及协议,发送采集到的现场环境信息,能够确保数据中心的各个机房现场环境请求信息发送到相关服务器当中。在DCIM 应用当中,SLAM 子模块属于前端环境采集的核心内容,因此,在DCIM 平台中占据重要地位。
SLAM 设计感知设备载体为可移动机器人,其主要应用于SLAM 技术的响应执行机构中,一般包含电机、云台以及万向轮等,上述执行机构作为SLAM 技术的重要动力机构,在具体设计应用中需要通过相应的驱动电路配备设置,在对电路运行的控制下,对其具体功能作用以及在SLAM 技术中的应用进行支持。
SLAM 技术应用中,对其自身定位以及地图构建等功能实现的重要支持机构中,均包含有感知设备,通过感知设备中的传感器对不同物理量的检测,为SLAM 技术应用和实现提供良好的支持。需要注意的是,由于不同感知设备的传感器辅助电路存在差异,在进行对应的数据软件应用于数据处理的具体方法也存在差别,其中,就包含有移动机器人中所配置的罗盘以及激光雷达、惯性传感器等几种不同的传感器及其数据分析方法等。
SLAM 感知设备的设计中,还会牵涉到相应的通信功能设计和应用问题。一般情况西,在SLAM 技术应用中,不管是其系统内部的模块间通信,或者是SLAM 技术中机器人和外部之间的数据交互,均需要相应的通信设计进行支持。值得注意的是,其通信设计主要应用于感知设备中,多会采用无线通信技术,通过感知设备在数据中心场地中自由移动来实现相应的数据感知与通信传输。设备与系统之间的通信采用802.11 的WIFI 无线通信协议,因此除了解决工作场地无线信号覆盖问题,对天线进行设计外,还需要进行针对性开发。在对SLAM 技术的感知设备无线通信设计中,主要涉及TCP/IP 协议的网络通信编程,使用基于标准API 的编程接口开发。
将SLAM 与RFID(Radio Frequency Identification)、ITI(Infrared Thermal Tmaging)、视频监控等方法相结合,自动准确的标识设备并进行设备运行状态监测。将SLAM 与网格方法相结合,将地图映射为数据中心工作人员可以读懂的格式,通过将SLAM 与网格方法相结合,进行感知设备的路径规划。
2.3 VP设计
VP(Visualization Platform)平台就是让某种原本不可见的变为可见。从根本上来说,就是是为了提高效率。VP 可视化平台应对DCIM,直观展示设备信息,快速检索、定位、提升日常运维工作效率。
可视化技术在SLAM 中的设计和应用,实际上就是通过对计算机图形学与计算机图像处理等技术手段的综合利用,在进行数据转换成图形或图像、并在屏幕上显示后,以满足其交互处理的理论、方法与技术的总称。可视化技术在具体设计应用中,不仅会涉及到计算机图形学与计算机图像处理、计算机视觉、计算机辅助设计等多项技术,而且通过上述技术手段的设计和应用能够为数据表示、数据处理、决策分析等功能实现提供良好的支持。当前,在各行业领域得到广泛应用与快速发展的虚拟现实技术,它也是以可视化技术作为基础的。
通常情况下,VP 平台设计主要应包括3D 引擎、图形接口、场景编辑器、模型管理、数据接口、环境展示等。其中,在进行可视化技术平台中的3D 引擎设计中,其作为进行驱动图形显示所需的核心3D 组件提供与支持的重要结构部分,在可视化平台设计中具有十分重要的作用。场景编辑器在可视化技术平台的设计和应用中,能够通过进行3D 场景资产资源的自由添加,对多个物理地点的机房场景添加以及切换、展示等进行支持。图形接口可将其它3D 工具创建的模型通过接口导入。可视化技术平台的数据接口具有易于集成扩展等特点,并且能够对ActiveMQ、WebService 等接口协议进行支持,同时实现标准接口提供,为DCIM 推送资产数据或者是监控数据提供支持。模型管理中设置有相应的内置产品模型库,可根据需求在后台上传更新。环境展示是通过对3D 场景的操作,以及对数据中心级、楼层级、机房级、机柜级、设备级、端口级的浏览进行可层次化递进实现和支持。[3]
3 结语
此次研究主要是基于数据中心探讨分析SLAM 可视化技术,SLAM 技术通过DCIM 平台与VP 平台进行对接,大大提高了数据中心机房运维能力,将实时化、具象化的场景与实时数据相结合,灵活展现数据中心运行环境、设备资产和各类报警信息,大大提高数据中心运维效率。
猜你喜欢
机械研究与应用(2022年4期)2022-09-15
世界科学技术-中医药现代化(2022年3期)2022-08-22
云南化工(2021年8期)2021-12-21
中老年保健(2021年12期)2021-08-24
中国传媒大学学报(自然科学版)(2021年1期)2021-06-09
海洋信息技术与应用(2020年1期)2020-06-11
中国生殖健康(2020年6期)2020-02-01
传媒评论(2019年4期)2019-07-13
中国生殖健康(2019年11期)2019-01-07
电子测试(2018年11期)2018-06-26
