
非接触式智能水位监测系统设计
2020-02-04 06:33徐海潮
电子技术与软件工程 2020年21期
徐海潮
(华设设计集团股份有限公司智能交通技术和设备交通运输行业研发中心 江苏省南京市 210014)
水位监测在内河航运建设、运营、管理、养护等过程汇总具有至关重要的作用。在航道管理方面,需要结合水位情况实时调整航标或谋划港航施工;在航道整治和航道疏浚方面,需要结合水位情况施工才能确保其经济性;在海事管理方面,水位情况关系到船舶航行政策;在船舶航行方面,需根据水位变化情况合理安排载货量,控制吃水深度等;在港口码头作业方面,需要根据水位信息调配船舶靠离泊、装卸货物等[1]。因此,建设具有自动采集、自动监测、自动运维的非接触式智能水位监测系统,具有非凡的意义。
1 现有水位监测技术
1.1 气泡式水位监测技术
气泡水水位监测技术是利用气泡式传感器实时测量水位。其原理是沉浸在河床底部的气泡式传感器承受压强与该处水位的高度成正比,只需采集到气泡式传感器承受压强,即可反推出该处水位高度[2]。

上式中,P 为水下深度为H 处的压强;ρ 为河水的密度;g 为当地重力加速度;P0为水面上大气压;H 为水的深度。
1.2 非接触式水位监测技术
非接触式监测技术是利用传感器探头测量探头至水面的高度。其原理是探头发射电磁波,当电磁波到达水面时有部分电磁波被反射回来,经探头接收后,通过来回时间计算水位高度的[3]。

上式中,H 为水的深度;H0为传感器探头至河床的高度;v 为传感器探头在空气中的传播速度;t 为传感器来回的传播时间。
1.3 基于卫星的水位监测技术
卫星测水位是利用卫星携带的天然测距仪,测定卫星到瞬时海平面的垂直距离的技术和方法。其原理是利用星载微波雷达测高发射装置以地面为遥测靶,通过卫星星下点的天线垂直向地面发射一定频率的压缩脉冲信号并记录脉冲发射时间,脉冲信号经地面发射后,卫星接收其返回脉冲时间,利用发射接收时间间隔和返回波形测量地面的距离,其具体计算公式如下:

上式中,H 为水的深度;A 为测高仪的椭球高;R 为测高仪的观测距离;H0为大地基准面相对于参考椭球面高度;∆H 为各项误差修正量。
1.4 基于机器视觉的水位监测技术
如图1所示,基于机器视觉的水位监测系统由水尺和摄像机组成,摄像机固定在水尺附近的合适位置,使水尺完全位于摄像机的视场内。摄像机对水尺刻度进行拍摄,利用水尺对摄像机标定。水位监测时,选取当前帧图像,与当前时空之前的几帧图像进行目标区域差分,提取水位变化区域,得到水位线在图像中高度,再根据摄像机标定的数学模型计算得到实际水位高度[5]~[7]。
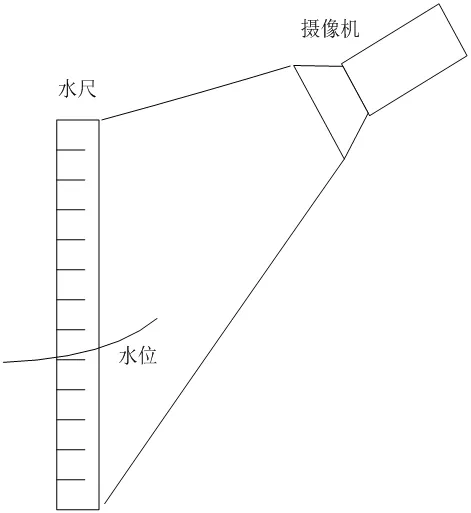
图1:基于机器视觉的水位监测系统示意图
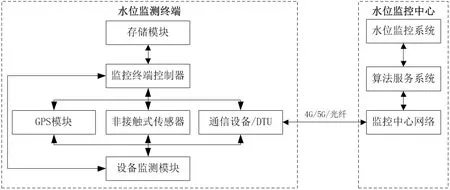
图2:水位远程监测系统结构
1.5 现有水位监测技术分析
针对上述监测技术,对各自的优缺点进行比较,结果如表1所示。
2 系统硬件设计
2.1 系统架构设计
本研究主要用于内河水位监测,而内河具有风浪较小、泥沙多(三峡泄洪影响)、雨雾和台风多等特点,结合精准性、经济性、便捷性等多方面考虑,选用非接触式水位监测技术,并设计传感器、电源、网络监测模块,实现非接触式水位监测系统的自动采集、自动运维功能。系统结构如图2所示。
与一般水位自动采集监测系统相比,本研究增加了GPS 模块,即使意外断电重启,终端从GPS 模块获取系统时间,并自动调整监控终端控制器时间,无需人工调整和干涉;增加了存储模块,如通信链路发生故障,监控终端控制器自动将水位报文存储至存储模块中,待通信链路回复后,自动传输存储模块中的水位报文,避免了因通信故障水位数据丢失情况发生;增加了设备监测模块,可自动采集传感器、GPS、通信设备/DTU、电源等状态,还具备远程控制、远程重启功能,实现自动运维,减轻后期运维工作量和成本;此外,本系统的水位监测终端对前端传感器和设备进行管理,除采集信息外,一般让其处于休眠状态,有效延长了蓄电池的续航时间。
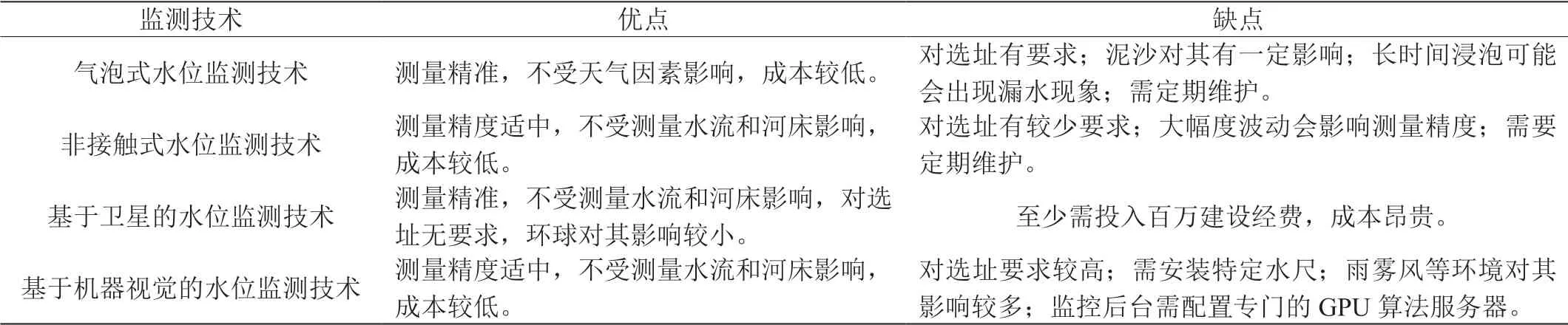
表1:水位监测技术比较
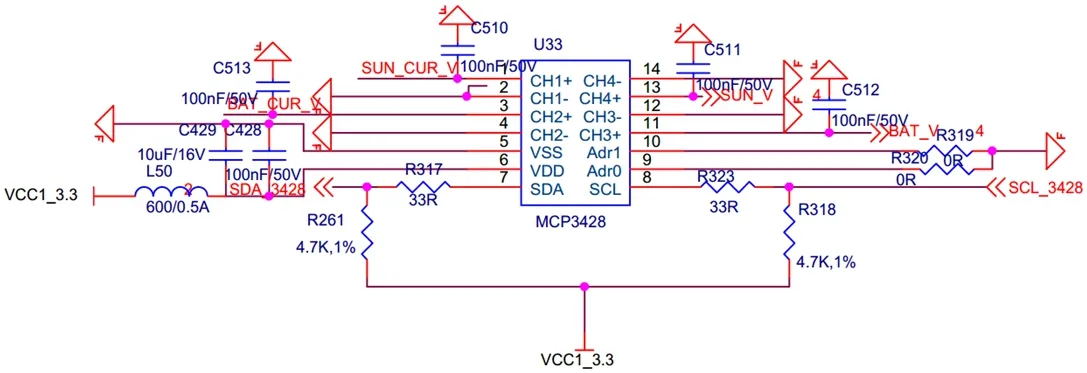
图3:高精度电压电流采样电路
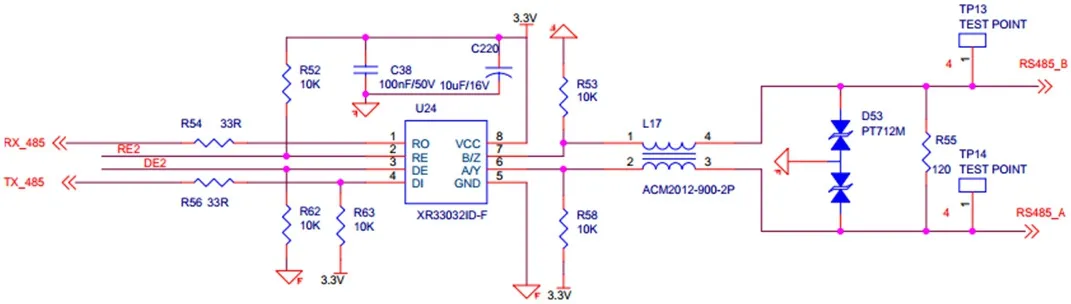
图4:传感器状态采集电路
2.2 状态监测设计
电压与蓄电池电量存在非线性关系,可通过监测蓄电池电压反推出蓄电池电量;电流是反映功耗的一个重要因素,可通过功耗和蓄电池电量,反推出水位监测终端续航能力;监测终端控制器与传感器、GPS、通信设备/DTU 实时通信,可判断传感器的健康状态。本研究的设备监测模块主要通过MCP3428 和XR33032ID-F 芯片监测蓄电池和终端设备实现,其具体电路图如图3 和图4所示。
3 系统流程设计
如图5所示,本研究的水位监测终端采集水位数据后,立即进入休眠状态,以达到节省能源的目的。然后经监控终端控制器封装成一包帧信息后,通过通信设备/DTU 传输至水位监测中心。其具体流程如下:
(1)开始,系统初始化,通过GPS 校正监控终端控制器时间;
(2)检测通信设备/DTU 链路状态;
(3)检测存储模块是否存在帧包,如有,发送帧包;
(4)系统启动计时,到达设定时间后,非接触式传感器采集水位数据;
(5)将时间、站号、水位封装成帧包;
(6)检测通信设备/DTU 链路状态;
(7)通信链路正常,将帧包发送;通信链路异常,将帧包保存至存储模块;
(8)等待水位监测中心应答帧包;如等待到应答帧包,等待下一次采集;如未等待到应答帧包,继续发送本次帧包。
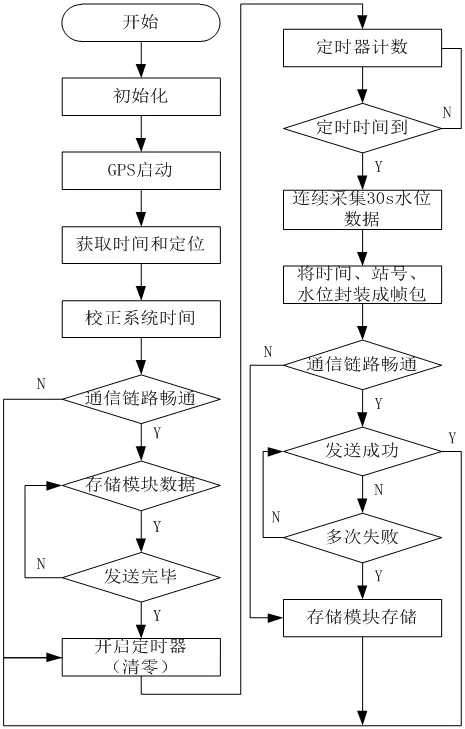
图5:水位远程监测系统软件流程

图6:通信协议帧格式
4 系统通信设计
为了保证水位数据规范性传输,在水位监测终端和水位监控中心之间制订了数据传输规约,规定了数据传输的帧格式、数据编码及传输柜子,可高效实现两者之间的问答式通信[8]。本系统遵守GB/T 18657 的传输规约,采用多层增强型帧结构,其格式如图6所示。
在本通信协议中,加入了帧头、帧尾和帧长度等信息,方便水位监控中心快速获取每帧数据包;加入了报文类型信息,便于快速高效解析;加入了终端编号和随机码信息,便于水位监测终端“知道”哪一帧发送成功;对数据域信息进行加密,进一步提高了数据传输的安全性;加入了CRC 校验码信息,保障了本帧数据包的准确性。
5 水位滤波设计
水位监测终端在实际工作过程中,由于受到波浪、灰尘等因素的影响,偶尔会出现水位数据异常情况,故需需要对异常数据进行处理,确保水位数据精准和可靠,才能航运行业提供精细化服务。
5.1 异常数据剔除
检查和核实每次采集的水位数据是否异常数据是本研究的关键,本研究中异常数据会处于波峰或波谷,故采用可消除偶然误差的滑动平均滤波法,其滤波思路是:
(1)连续取最新的N(N ≥10)个采样值看成一个队列;
(2)把队列的长度固定为N;
(3)每次采样到一个新数据放入队尾,并扔掉原来队首的一次数据(先进先出原则);
(4)把队列中的N 个数据进行算术平均运算,并把队尾的新数据与算术平均值比较;如果误差超过设定阈值,剔除队尾新数据。
5.2 异常数据插值
对于剔除后的新数据,如不补充,将会导致这一时刻缺少水位数据,既不利于查看、统计、分析,也不便于挖掘水位数据背后深层次规律,故需要对剔除后的新数据进行插值补充,其具体思路是:
(1)获取离最新数据的前3 个时刻水位数据,分别记为x1,x2,x3;
(2)根据平滑算法公式,计算当前时刻水位数据(新数据)x=(x1+2x2+3x3)/6;
(3)用计算出的x 代替当前时刻水位数据(新数据)。
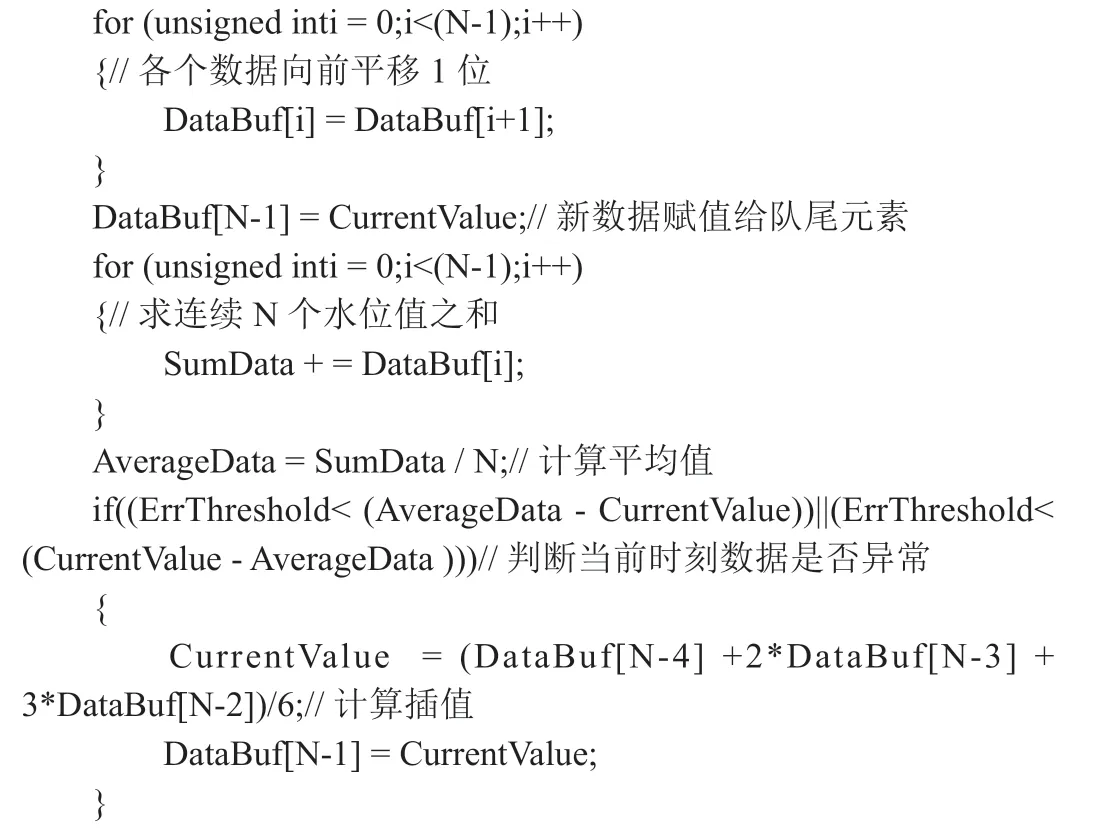
5.3 滤波程序设计
根据上述的思路,并开发了滤波核心代码:
6 结束语
笔者设计了非接触式智能水位监测系统,实现了水位的远程监测、自动采集、智能运维等功能,为水文分析提供可靠的水位数据,对交通、水利等部门制定政策具有重要作用。在水位监测方面,建议后续工作从以下两方面开展:
(1)对已有的水位数据质量检验、校核、填充等研究;
(2)基于已有的水位监测数据,开展水位预测预报研究。
猜你喜欢
冶金设备(2020年2期)2020-12-28
现代装饰(2020年8期)2020-08-24
铁道通信信号(2019年9期)2019-11-25
铁道通信信号(2018年10期)2018-12-06
中国资源综合利用(2017年4期)2018-01-22
制造技术与机床(2017年12期)2017-02-02
电子制作(2016年15期)2017-01-15
华东理工大学学报(自然科学版)(2015年1期)2015-11-07
自动化博览(2014年4期)2014-02-28
河南科技(2014年4期)2014-02-27
