
无刷直流电机网络控制系统设计与应用
2020-02-02 06:46张兵尹玉鑫
电子技术与软件工程 2020年15期
张兵 尹玉鑫
(南阳农业职业学院机电工程系 河南省南阳市 473000)
1 无刷直流电机网络控制系统的总体设计
无刷直流电机的网络控制系统主要包括局域网下的主机、网络和终端三大部分,如图1所示,硬件系统由PC 机、路由器、网络转换器和无刷直流电机闭环控制系统构成,软件系统主要包括电机驱动程序和数据传输协议的编写。在局域网下,输入信号可通过多台PC 机发送给终端的控制器,数据在发送和接受过程中遵循TCP协议和RS232 协议。控制器接收信号计算出控制量给三相全桥逆变电路,控制量经过逆变电路变为电压信号输送给无刷直流电机,霍尔传感器实时反馈位置信号,确保电机正常换相和运行,实现无刷直流电机网络系统的闭环控制。
2 无刷直流电机基本结构
2.1 电机本体
无刷直流电机以体积小、维修方便、调速范围广等优点被工业生产、智能家居、汽车和航空航天领域应用[1]。如图2所示,无刷直流电机基本结构主要由电机本体、直流稳压电源、霍尔位置传感器和驱动电路构成[2]。
电机本体主要由转子和定子组成,转子为永磁体材料,定子有两部分:电枢绕组和铁芯,两者的物理安装位置和有刷电机完全相反[3]。在电机运行过程中,定子绕组通电产生旋转磁场与永磁体磁场交链,根据矢量分析法,在转子水平x 方向产生力的作用,使电机正常运行,且在运行过程中两者磁场方向在空间上保持90°电角度同步旋转,因此无刷直流电机也属于同步电机,本系统选用无刷直流电机额定电压24V,额定电流4A,额定转速4400r/min,转矩输出0.20N.m,极对数为2。
2.2 霍尔位置传感器
霍尔位置传感器属于光电传感器的一种,由光栅盘、投光器、受光器和放大电路组成[4]。根据转子位置的旋转,它将光信号转换为电信号,输入控制器中CAP 模块,控制器根据位置信息进行换相处理,驱动三项全桥逆变电路桥臂上MOS 管导通,保证电机正常运行。本系统采用的霍尔传感器为磁敏式,安装位置在六个定子绕组中呈120°(电角度)间隔放置。
2.3 电机驱动电路设计
电机驱动电路主要由三相全桥逆变电路、滤波电路、电源模块和霍尔信号处理电路组成。它的作用是实时接收控制器中6 路PWM 信号,决定逆变电路中6 个MOS 管导通时间和导通顺序,将直流稳压电源逆变为A、B、C 三相交流电,输送给无刷直流电机,其余模块作为辅助电路,为信号的滤波和芯片工作提供能量[5]。
2.3.1 三相全桥逆变电路

图1:无刷直流电机的网络控制系统
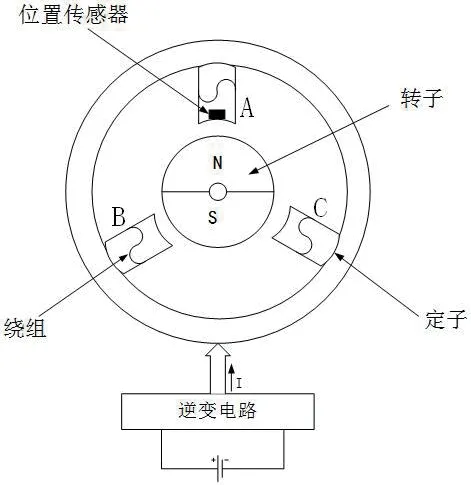
图2:无刷直流电机本体结构
三相全桥逆变电路的设计是整个硬件电路系统的关键,它的基本原理是将直流电转换为交流电[6]。电路主要架构由三个桥臂组成,每个桥臂上具有两个开关频率高、驱动功率小的MOS 管。电路运行过程中,每个时刻只能有两个MOS 管导通,且同一桥臂两个管子不能同时导通,造成短路现象。本系统驱动芯片为IR2136,MOS 管采用IRF3205,其漏极电流最高可达110A,漏极源极电压可达60V,符合电机运行性能要求。考虑多路电源对芯片供电易产生信号干扰,因此采用自举电路使六个MOSFET 共用一片IR2136,如图3所示三相全桥逆变电路。
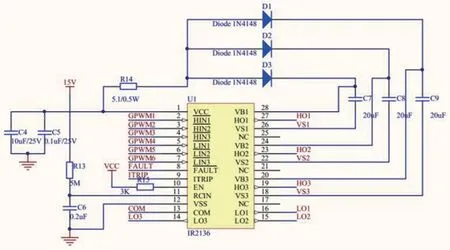
图4:自举电路

图5:隔离电路

图6:相电流采集电路

图7:电源电路
2.3.2 自举电路
自举电路是一种使用广泛,给高压栅极驱动集成电路(IC)的高端栅极驱动电路供电的方法,具有简化电路设计、功耗低、电路稳定性高等优点[7]。
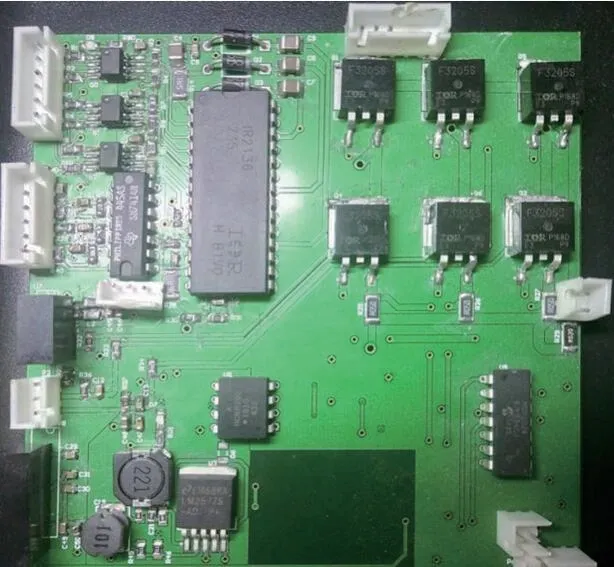
图8:无刷直流电机驱动板
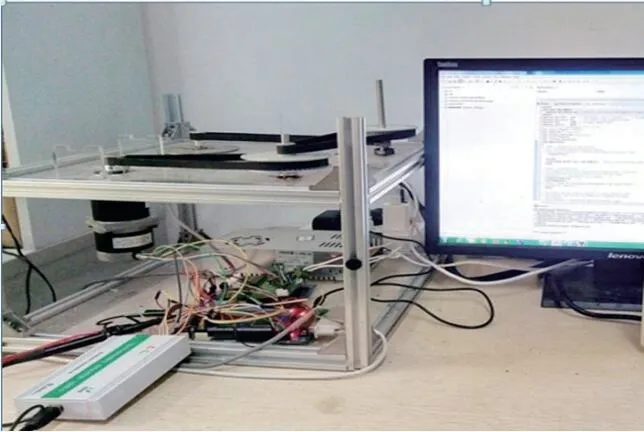
图9:无刷直流电机网络控制实验平台
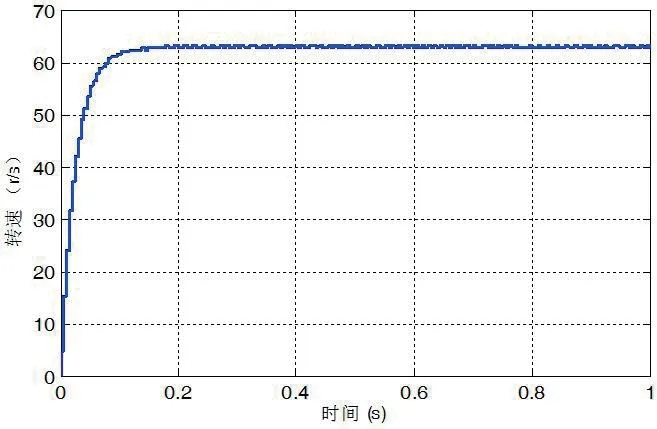
图10:电机转速-时间响应
在三相全桥逆变电路中,每个桥臂上、下各有一个MOS 管(IRF3205),该芯片门极开启电压为2-4V。如图4所示自举电路,其中主要元器件为自举电容和自举二极管,其工作原理:在某一时刻,驱动芯片IR2136 第15 管脚LO2 输出高电平时,Q6 管导通,自举电容C8 充电,下桥臂导通;下一时刻,当IR2136 输出HO2为高电平时,自举电路通过R18、Q3 管的源极和栅极之间构成回路放电,此时自举电容C8 相当于一个电压源,使Q3 管达到开启状态,则上桥臂导通,二极管是防止反向电流冲击烧坏芯片,起保护电路作用。
2.3.3 光耦隔离电路
如图5所示,光耦隔离电路基本单元是三极管和发光二极管,利用电-光-电物理转换方式实现电气信号隔离,本系统中设计光耦电路主要用于DSP28335 输出的6 路PWM 信号的电气隔离,实现电路两端信号互不干扰,特殊电路中需增加上拉电阻,提高电流驱动能力[8]。
本系统光耦隔离电路选用HCPL-2631芯片,根据芯片手册可知,该芯片为低电平驱动,电源电压为5V,处理速度可达10MBd,因此此芯片性能符合无刷电机驱动电路隔离要求。其中R9 作为限流电阻,防止电流过大,避免出现尖峰脉冲噪声。
2.3.4 信号采集电路
相电流和反电动势波形信号是反映无刷直流电机控制效果的重要指标,考虑本系统电路设计的实际情况,采用采样电阻法进行信号采集[9]。在逆变电路中,选择三个额定功率5W、阻值0.05Ω 的采样电阻放置在待测电路中,分别串联在下桥臂电路,电机运行过程中,由DSP28335ADC 单元实时获取采样电阻两端的电压值,由于电阻值较小,因此根据欧姆定律可得电压值约为电流值。如图6所示。
考虑ADC 采样电压范围(0-3.3V),经过计算,采样电流值太小无法供DSP 准确采样,因此需要增加放大电路对信号放大,调整为控制器支持的电压范围内。
本系统选用LM358 作为放大器芯片,带宽达到1MHZ,工作电源3-30V,共模输入和低功耗电流,电压信号经过滤波、放大之后,供控制器实时采集。
2.3.5 电源电路
在驱动电路工作过程中,各芯片都需不同的工作电源,涉及多种电源电路通常有电流和通信等信号干扰,可能造成系统电压不稳定,严重时甚至烧坏芯片[10]。
根据本系统中无刷直流电机的各项参数,主电源选择一种额定电流10A,额定电压24V 的直流稳压开关电源。本系统中共有6 种不同的电源信号,其中4 种通过电源芯片电路设计产生,2 种为外部(DSP28335)提供。如图7所示。
分别采用电源芯片A0515S、B0505S 及升压电路产生15V 模拟电压、1.65V 模拟电压、15V 和5V 数字电压信号,外部电源和DSP 控制器提供24V、3.3V 电压信号,其中部分电源电路如图所示,在电源正极与GND 之间并联电容,作用是滤除电压谐波信号[11]。
2.3.6 PCB 板设计规则
根据上述电路原理设计,在Altium Designer 13 软件环境下绘制PCB 板。首先绘制电路原理图,在元件库中找出需要用到的芯片,区别直插式和贴片式,按要求进行选用并连线。如在元件库中无法找到此芯片,则需设计者参考芯片数据手册自行封装,芯片封装严格按照管脚尺寸、距离、宽度等数据进行,确保能正常发挥作用。电路原理图设计完成,需进行PCB 板绘制。PCB 板的设计和工艺质量不仅会影响驱动电路的安全性和稳定性,还关系到无刷直流电机网络控制系统产品的实用价值,因此在制作电路板过程中充分考虑以下问题[12]:
(1)电路中各电源、信号源之间的电磁和谐波干扰;
(2)PWM 高频(20KHz)切换引起的谐波干扰;
(3)电路中模拟信号和数字信号共地问题;
因此,在电机驱动板设计印制时,不仅要有符合系统要求的电气原理和各项性能指标,还应充分保证电路板的隔离性能和抗干扰性。为降低噪声干扰,在硬件电路的设计和制作过程中,采取以下措施:
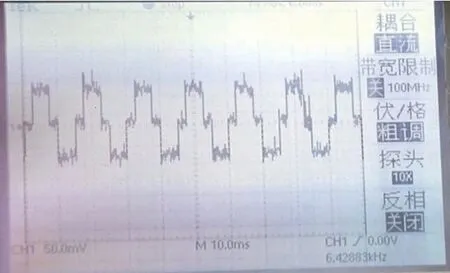
图11:电机相电流信号
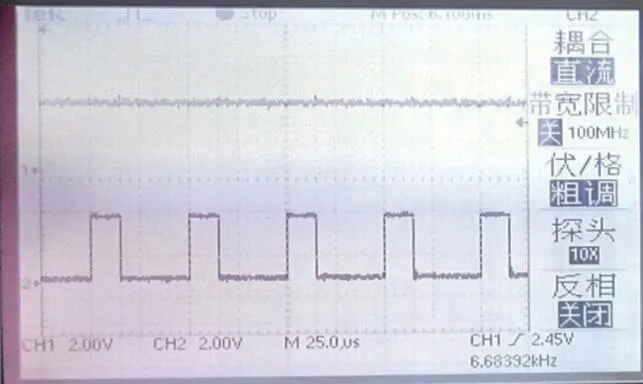
图12:电机PWM 控制信号
(1)布线遵循规则。各元件之间连线应遵循“横平竖直”的原则,走线方向尽量选择180°水平或竖直走向,也可选择45°走角,避免出现锐角和直角走向[13]。
(2)合理安排布局。元器件尽量选用贴片式,主控芯片DSP28335 放置电路中心,方便信号输出和其他芯片之间的通信,有效节省电路板空间。
(3)抑制外部噪声。本系统各种设计光耦隔离电路和采用四层板架构,将模拟信号、数字信号、电源信号和GND 进行电气隔离,减小信号间干扰,还可通过加磁珠和屏蔽磁环等手段隔离[14]。
无刷直流电机驱动板如图8所示。
3 无刷直流电机网络控制
3.1 协议转换器
RS232 转Wi-Fi 盒是一款Wi-Fi 串口服务器,该串口服务器可以方便地使串口设备连接到局域网下Wi-Fi 无线网络,实现串口设备的无线化网络升级[15]。在使用过程中,局域网下各PC 机需安装虚拟串口软件,服务器就可直接通过RS232 协议转为Wi-Fi 协议进行信息交互,此功能主要用于无刷直流电机控制指令的下发和反馈信号的上传。
3.2 无刷直流电机网络控制系统
根据上述电路硬件和网络架构设计,搭建无刷直流电机网络控制系统,如图9所示,设置局域网和PC 机各项配置参数,并对系统电路和控制器性能进行测试,验证网络控制系统的有效性和优越性。
4 实验结果与分析
在无刷直流电机网络控制平台上,将开环程序通过仿真器下载到DSP28335 芯片中,进行开环实验。通过示波器、电流钳和CCS6.0 开发环境等测试仪器完成对系统各输出信号的采集,图10、图11和图12分别是电机在转速为运行时的转速信号、A 相电流信号和PWM 控制信号波形图。
5 结论
本文主要研究无刷直流电机网络控制系统,主要从电机构造、驱动电路板制作和网络构架三个方面进行设计实验,最后通过网络控制平台的实验效果证明:驱动电路板设计合理、实用性强,完全符合系统选用电机的各项性能要求,网络架构和电机控制效果具有响应时间快、鲁棒性强和抗干扰能力好等优点。
猜你喜欢
大电机技术(2022年5期)2022-11-17
阅读(快乐英语高年级)(2019年2期)2019-09-10
电子制作(2017年1期)2017-05-17
电测与仪表(2016年4期)2016-04-11
消费者报道(2016年3期)2016-02-28
风能(2016年12期)2016-02-25
铁道科学与工程学报(2015年4期)2015-12-24
电测与仪表(2015年23期)2015-04-15
淮南师范学院学报(2015年3期)2015-03-22
电机与控制应用(2015年1期)2015-03-01
