
铁路侵限异物检测方法综述
2020-01-18 11:28:36王泉东杨岳罗意平魏晓斌刘斯斯
铁道科学与工程学报 2019年12期
王泉东,杨岳,,罗意平,魏晓斌,刘斯斯
(1.中南大学 交通运输工程学院,湖南 长沙410075;2.株洲电力机车有限公司 大功率交流传动电力机车系统集成国家重点实验室,湖南 株洲412000)
铁路运输具有运输能力强、效率高、运营成本低等优点,近年来在我国得到了飞速发展[1]。据国家统计局统计,截至2018年底,我国铁路营业里程达13.1 万km,其中高铁2.9 万km,占世界高铁总量的66.6%,铁路电气化率和复线率分别居世界第1 和第2 位。铁路已成为我国交通基础设施的重要组成部分,对我国经济发展起着关键作用。在此情况下,如何保证列车运行的安全、快速、可靠也成为铁路运营单位必须面对的问题。异物侵入铁路安全限界(异物侵限)可能引发交通事故,危害铁路交通的安全与稳定,已引起社会的高度重视。铁路限界是为了保证运输安全而制定的建筑物和设备在铁路线路上与机车车辆相互间不能逾越的轮廓尺寸线。所有侵入铁路限界、妨碍铁路系统正常运行的物体都可视为侵限异物。异物的种类有很多,对铁路安全构成较大影响和安全威胁,表1列举了不同种类的侵限异物给铁路运输带来的安全危害。异物侵限事件具有突发性和随机性,发生的时间和地点往往很难预测。因此,先进实用、稳定可靠的异物检测技术是保障列车运行安全的重要前提。传统异物检测工作由人工完成,这种方法费时费力、效率较低。为了提高检测效率、降低人工劳动量,多种自动化的异物检测技术已应用于铁路行业。目前常见的自动化异物检测方法有:电网检测法、光纤光栅检测法、视频检测法、雷达检测法、超声检测法和红外线屏障检测法。这些方法都结合先进检测算法和计算机技术进行异物检测,在一定程度上能提高异物检测效率并降低工作人员的工作量。然而,异物检测技术还面临着以下挑战:侵限异物种类众多且形态特征各异;铁路全线路异物检测任务量大;现有异物检测技术的时效性不理想。结合所面临的挑战与研究现状,本文将常见的异物检测方法归纳为接触式检测法和非接触式检测法两大类,对各种检测方法的技术特点和应用范畴进行分析和总结,并对发展趋势进行展望。

表1 侵限异物种类与危害Table 1 Intrusion types and hazards
1 接触式异物检测
铁路侵限异物接触式检测是通过传感元件与异物直接或间接接触获得异物信息的检测方法。这类方法数据处理较为简单,技术相对成熟。常见的接触式检测方法主要有电网检测法和光纤光栅检测法。
1.1 电网检测法
电网检测系统一般安装于铁路两侧的防护网上,通过电缆中电流的通断来检测异物。根据电网的复杂程度,可将电网检测法分为单电网检测法和双电网检测法。单电网内部接通直流电,当异物撞断电缆时,电路被切断,回路中的重力安全继电器自动跌落,系统发出警报。双电网具有2 层电缆,当1 层电缆断线时,系统发出预警信息;当2 层电缆同时断线时,系统发出报警信息。
石华武[2]提出一个基于直流电的双电网,并将其应用于铁路异物检测和防灾。张智祥[3]在双电网的电缆传输的直流电中加入动态信号,解决了电网检测法的假通问题。刘洋[4]将2 层电网分别安装在防护网的两侧,通过2 电网数据的协同滤波提升了侵限异物检测的准确性。XU 等[5]提出一个基于泄露同轴电缆的异物侵限检测系统,通过对各电缆内获得的布尔混沌信号回波进行滤波并与发射波对比确定侵限异物的位置,位置精度为30 cm。
1.2 光纤光栅检测法
光纤光栅是一种通过一定方法使光纤纤芯的折射率发生轴向周期性变化而形成的衍射光栅。当光纤光栅传感器受到外力影响时,其反射光的峰值波长出现漂移[6]。在铁路异物检测的实际应用中,一般光纤光栅传感器安装于防护网或者缆绳上,如图1(A 为光纤光栅应力传感器,B 为光纤光栅应变传感器,C 为光纤光栅振动传感器)。当异物撞击防护网时,光纤光栅异物检测系统通过传感器内的反射光峰值漂移量探测出防护网的受力、变形和振动,进而对异物侵限严重程度做出评估。

图1 光纤光栅异物检测系统Fig.1 Fiber grating intrusion detection system
Gebbia 等[7]提出一个典型的异物侵限检测系统,将光纤光栅传感器安装在护栏上检测侵限异物。刘建斌[8]将光纤bragg 光栅与SNS 柔性防护网配合使用,预防滚石入侵铁路限界。Catalano 等[9-10]将集成了光纤光栅拉力传感器的橡胶垫放置于铁轨旁边,通过橡胶垫被踩踏产生的形变检测行人的侵限行为;并将集成橡胶垫中的光纤光栅拉力传感器的排布网格化,能够检测出入侵行人的重量与位置[11]。
2 非接触式检测法
铁路侵限异物非接触检测法借助电磁波和声波的传输特性,在不接触被测物体表面的情况下,得到异物的参数信息。这类方法能获取的数据中包含的信息量较大,数据处理相对较难。主要包括视频检测法、超声波检测法、雷达检测法和红外线屏障法。
2.1 视频检测
铁路侵限异物视频检测利用相机代替视觉器官作为图像采集工具,由计算机代替大脑完成数据处理和信息提取[12]。原理上,相机获取的异物图像为三维数字矩阵(RGB 图像),使用不同的图像处理算法对异物图像进行矩阵运算,可提取出图像中包含的侵限异物信息。根据相机是否随载体移动,可将视频检测法分为固定视频检测法和车载视频检测法。
2.1.1 固定视频检测
固定视频检测法以监控系统为基础,在通过图像处理算法实现侵限异物自动检测的同时,也能提供24 h 实时监控画面以辅助工作人员确认监控点的安全状况。
Oh 等[13]通过对比背景差分法的运算结果和预设阈值的差异检测从月台掉入轨道区域的行人;并在原系统的基础上,基于立体视觉相机检测异物位置和大小[14]。Song 等[15]在背景差分法提取轨道区域的基础上,使用模糊分类算法计算列车的位置和运动速度,对视频数据的处理速度为12.5 ms/帧。Silar 等[16]使用基于改进的Lucas-Kanade 算法对侵限异物的图像进行光流向量提取,通过基于K 均值聚类算法求解控侵限异物的位置与运动速度。Pu等[17]建立一个铁路平交道口的模型,基于图像差分法检测侵限的汽车,并测试了不同光照强度对检测精度的影响。Delgado 等[18]使用背景模板法提取车站的铁路道床与行人轮廓,通过计算行人轮廓和道床区域的重合度检测从月台掉落到道床的行人,检测精度可达90%。TENG 等[19]使用背景差分法进行铁路边坡的滑坡检测,检测精度为96%。ZHANG等[20]使用背景模板学习法提取铁路平交道口的背景模板,通过在背景模板中计算相邻视频帧之间的像素移动值,检测列车即将通过平交道口时异物的侵限行为,并对异物侵限引发的安全风险做出了评估。
2.1.2 车载视频检测
由于铁路线路不是完全封闭的,异物侵限在铁路全线都有可能发生,安装于固定位置的异物检测系统检测范围有限,不能实现铁路全线异物检测。车载视频检测系统的相机安装于列车的头部,随着列车的运行进行铁路全线异物检测[21],如图2。

图2 车载视频检测系统Fig.2 Train-mounted and intrusion detection system
Mockel 等[22]将摄像头和激光雷达安装于列车的头部,通过融合视频数据和雷达信号检测铁路侵限异物,该系统具有较强的鲁棒性,能实现120 km/h时速下的异物实时检测。Miyayama 等[23]为了保障有轨电车前方的运行安全,基于背景差分法提取电车前方动态异物的运动向量,并通过比较电车和异物的运动向量判断电车是否会与异物发生碰撞,判断正确率为92%。Aminmansour 等[24]基于列车的驾驶舱视角,通过集成方向梯度法、Radon 变换、分水岭算法、距离变换等一系列图像处理算法进行平交道口的车辆检测,在白天对侵限车辆检测精度可达95.72%。Berg 等[25]使用红外相机获取铁路运行环境的热力图像,基于前景-背景分割算法从图像中分离列车前方的异物,能满足200 km/h 时速下的异物检测需求。Mukojima 等[26]通过背景差分法检测列车前方的侵限异物,结合归一化向量距离法和径向延伸滤波器2 种方法的优势,提高了异物检测的稳健性,检测精度为85.8%。Van 等[27]发明了一个基于车载前视摄相机和GPS 的异物检测装置,能检查铁路两侧植物的侵限情况,并记录侵限位置。
2.2 雷达检测法
雷达使用电磁波的反射原理获得被测物体的位置、形态等信息。图3为基于束波雷达的铁路平交道口异物检测系统,2 个束波雷达雷达分布于铁路的两侧,分别以50 度宽的波束扫描宽度覆盖整个铁路平交道口区域。当有异物进入监控区域时,雷达发射出的电磁波被侵限异物反射。根据发射波与反射波的信号差,基于光的多普勒效应可求出侵限异物的距离和大小[28]。

图3 基于雷达的异物检测系统Fig.3 Radar-based intrusion detection system
Narayanan 等[29]基于MIMO 雷达设计了一个铁路平交道口异物检测系统,能评估侵限异物对平交道口造成的安全风险。Govoni 在超带宽雷达技术的基础上提出了多天线数据融合方法[30],能够同时监控数10 km 范围的铁路异物;并对数据融合算法进行了改进,能根反馈信号对侵限异物进行重建[31]。Hsieh 等[32]使用激光雷达对铁路平交道口进行实时监控,并以一种新的无线传输方案将异物检测结果传输给即将通过平交道口的列车,使驾驶员拥有充足的时间应对列车面临的险情。Amaral 等[33]基于激光雷达获得的数据库建立了铁路平交道口的背景点云模板,通过对比实时点云与点云背景的差异检测侵限异物的位置与大小,每帧点云的处理时间为100 ms。Roberts 等[34]发明了一种列车防撞装置,通过车载雷达实时检测列车前方的侵限异物,能在发生险情时辅助驾驶员紧急停车。Horne 等[35]依据雷达的侵限异物检测信息控制平交道口四象限门的开合,防止有异物被四象限门困在平交道口内,并使用视频监控辅助评估该方法的有效性。Van 等[36]使用变化检测和半自动识别的方法从激光雷达获取的数据中提取落石的位置、形状、体积等详细参数,得出了采样距离间隔对边坡落石发生的频率-幅值关系的影响。WU 等[37]将雷达安装在列车的车身,通过射频接收强度判断站台行人是否与列车保持安全距离,并测量了不同种类异物的射频接收强度值。Shinoda 等[38]使用激光雷达扫描有轨电车的前方道路,基于语义识别的方法检测电车前方轨道上的行人、车辆等异物,检测范围为120 m。
2.3 超声检测法
基于超声在传播过程中的衰减和反射特性,可将超声应用于检测铁路异物。图4为一个典型的超声波异物检测系统(EA和EB为编码不同的超声发射器,R 为超声接收器)。该系统以超声覆盖铁路路面,当异物进入超声波的覆盖范围时,超声波会因异物遮挡而衰减。根据超声的衰减量,可判断异物大小。不同的超声编码用于区分超声来源,以判断异物的位置[39]。
Mcconnell 等[40]发明一个基于超声的异物检测系统,通过声波的反射原理测量铁路平交道口是否存在列车。Alvarez 等[41]建立一个基于多编码超声异物检测系统,使用超声场覆盖铁路区域,通过超声波被遮挡的衰减量来检测坠落到铁轨上的异物;并在原系统的基础上,进行超声信息解调方法优化[42]。
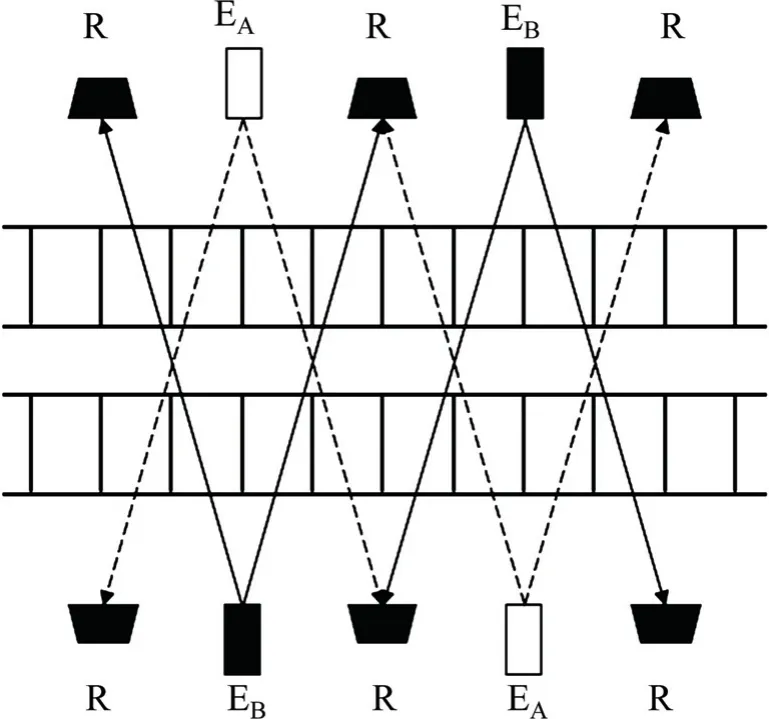
图4 超声异物检测系统Fig.4 Ultrasonic intrusion detection system
2.4 红外线屏障法
红外线屏障法利用红外线易被物体遮挡的特性检测铁路侵限异物。如图5(E 为红外线发射器,R 为红外线接收器),分别将红外线发射器和红外线接收器布置于铁路两侧,每一个红外线发射器发射出编码不同的红外线波束,当有异物遮挡红外线信号时,系统根据因被遮挡而缺失的红外线的编码序列判断异物的位置,并通过红外线信号缺失量计算侵限异物的大小。
Garcia 等[43]基于互补序列对和相互正交组序列对[44]的信号编码方法搭建红外线屏障,可检测尺寸大于边长为50 cm 的立方体的异物;同时,基于信号冗余法[45]、卡尔曼滤波器[46]、H∞滤波器[47]和主成分分析[48]等方法优化了异物检测算法,降低了系统的误报率;并集成红外线屏障、视频监控器和超声屏障等设备[49],使用模糊逻辑和D-S 证据理论对融合数据进行处理,提高了系统对小型物体的抗扰能力[50]。

表2 各类异物检测方法的适用场景Table 2 Applicable scenarios for various Intrusion detection methods
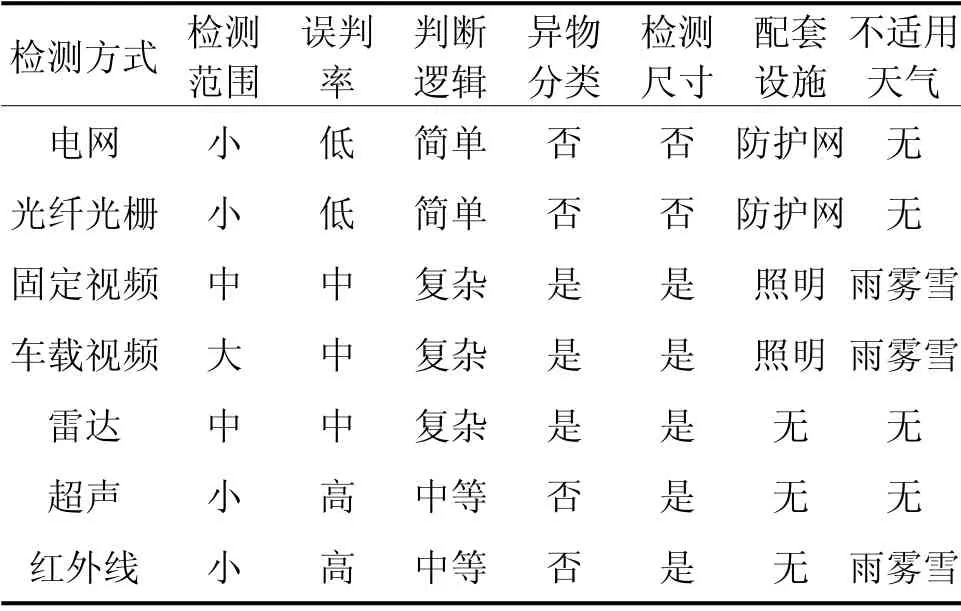
表3 各类异物检测方法的综合性能Table 3 Comprehensive performance of various Intrusion detection methods

图5 红外线屏障Fig.5 Infrared barrier
3 评价与比较
综上所述,各异物检测方法的适用场景如表2(Y 为适用,N 为不适用)。从表2可以看出:
视频检测法和雷达检测法在各种铁路场景中应用更加广泛。因相机和雷达的传感器集成度高,体积较小,检测范围较大,故能较好地适应多种铁路场景。而电网检测法、光纤光栅、超声检测法和红外线检测法涉及的传感器较多,需要占用较多的空间,故在平交道口和车站等人流量较大的铁路场景使用少。
各异物检测方法的综合性能比较见表3。由表3可见:
1)接触式异物检测法具有误判率较低,能全天候使用,实施的技术难度低等优点,技术相对成熟。但检测工作的进行依赖于异物与传感系统的接触,因此无法检测到从铁路上方掉入铁路区域的异物和悬空的异物,也无法检测到异物的大小和种类。
2)相比接触式异物检测法而言,非接触式异物检测法能获得更多的异物信息,可以检测异物的大小和所处位置,检测精度更高。特别是视频检测法和雷达检测法,这2 种方法获取的异物数据蕴含丰富的语义,目前的技术还不能完全将数据中包含的信息提取出来,具有极大的发展潜力与开发应用价值。
3)超声检测法与红外线屏障法由于灵敏度较高,容易受到小型物体(树叶、杂草等)影响产生误报。受制于交叉射线式的检测方式的约束,这2 种检测方法容易漏检没有遮挡超声和红外线而进入轨道区域的小型异物。另外,超声检测法和红外线屏障法涉及的传感器众多,增大了系统的不可靠性和维护难度。故超声检测法与红外线屏障法在铁路行业的应用相对较少。
4 发展趋势
以上对目前研究的各种铁路侵限异物检测方法工作原理、技术特点及应用范畴进行了分析比较。 面对铁路异物种类众多、铁路里程总量大、轨道车辆的行车速度加快、事故预防能力不强等异物检测现状与难点,铁路入侵异物检测发展的未来趋势包括以下几点:
1)更大的检测范围。对于电网检测法和光纤光栅检测法等接触式异物检测方法,需要在事故多发的路段加设防护网与传感器系统以提高在铁路异物检测在全路段的覆盖率;对于固定视频检测法、雷达检测法、超声检测法和红外线屏障法等固定式非接触异物检测法,需要提高单个传感器的检测范围,以更少的传感器覆盖整个检测区域,从而提升异物检测的经济性并降低系统的维护难度;对于车载视频检测法等移动式非接触检测法,需要提高将检测范围提高到800 m 以上,才能保证列车在发现异物后能在标准制动距离内及时制动。
2)更高的检测效率。为了保障铁路系统运行安全,需要实现侵限异物的快速甚至实时检测,才能给工作人员和列车充足的异物处理时间。
3)多种检测方法集成使用。不同的铁路入侵异物检测技术均有不同的优点和局限性,单一原理的检测技术不足以应对所有的使用情况,且难以获得入侵异物的全部信息。融合多种异物检测传感器数据获得的检测结果具有更高的精确度,有助于异物侵限状况的评估并为铁路安全维护提供更准确的参考。
4)智能化。现有的铁路入侵异物检测方法自动化程度仍然不高,很大一部分工作仍由人工完成。随着先进的数据处理算法和计算机技术应用于铁路行业,较机械化的异物检测任务对人工的需求量将得以减少。
5)大数据管理。结合多种异物检测方法,全面记录异物入侵数据与案例。基于大数据和云计算管理平台实现异物在线检测和历史数据等模态信息的融合分析和数据挖掘,准确评估不同铁路路段的安全性。
5 结论
对电网检测法、光纤光栅检测法、视频检测法、雷达检测法、超声检测法和红外线屏障法等铁路侵限异物检测方法的研究背景、相关工作、应用场景、综合性能和优缺点进行综述。电网检测法和光纤光栅检测法等接触式异物检测法目前使用最多,技术最为成熟。视频检测法和雷达检测法能有效提取侵限异物的位置、大小等参数,检测精度高,具有较大的发展潜力。未来的异物检测技术的发展方向在追求更大的检测范围和更快的检测速度的同时,也会将多种检测方法集成使用,以提高异物检测系统的抗扰能力并获得更可靠的检测结果。异物检测的智能化与大数据管理将提高异物检测效率,并提供可靠的铁路安全维护综合决策。
猜你喜欢
农产品加工(2024年7期)2024-05-26 09:30:32
中学生数理化·八年级物理人教版(2021年10期)2021-11-22 08:00:02
当代医药论丛(2017年22期)2017-04-12 06:30:22
高师理科学刊(2016年8期)2016-06-15 20:27:46
湖南城市学院学报(自然科学版)(2016年4期)2016-02-27 14:02:41
电源技术(2015年2期)2015-08-22 11:28:14
发明与创新(2015年30期)2015-02-27 10:39:52
电测与仪表(2014年6期)2014-04-04 11:59:46
电测与仪表(2014年17期)2014-04-04 11:56:54
物理与工程(2014年4期)2014-02-27 11:23:08
