
基于蓝牙控制技术的智能小车控制系统设计
2020-01-16 09:20:22温芮陈锦鸿王丽
汽车零部件 2019年12期
温芮,陈锦鸿,王丽
(华南理工大学广州学院,广东广州 510800)
0 引言
蓝牙作为一种无线技术标准,可实现固定设备、移动设备间的短距离数据交换。当今汽车车载蓝牙应用范围越来越广,移动智能手机也给人类的生活带来了便利。设计基于蓝牙控制技术的智能小车控制系统,可为车载蓝牙与手机相结合的设计提供新的设计思维与方法,也为汽车无线远程控制的设计提供参考。
1 总体设计方案
此设计以安卓手机作为控制端,以STC89C52单片机为蓝牙信号接收控制核心。首先需要在安卓手机端安装蓝牙APP,利用APP作为平台发送蓝牙数据,智能小车端的蓝牙模块把接收的数据通过单片机串口把数据传给STC89C52单片机,单片机处理判断后作出反应,如此实现对智能小车的蓝牙控制。智能小车主要实现以下功能:
(1)具有智能循迹,在简单环境中实现自动避障功能;
(2)具有手机APP蓝牙控制功能的智能小车,可通过手机操作界面实现小车的前进、后退、右转弯、左转弯等功能。
智能小车控制系统总体设计框图如图1所示。
主要工作原理为:装有蓝牙APP的安卓手机将控制命令发送给智能小车蓝牙模块,蓝牙模块把信号传输给单片机进行处理,单片根据传递过来的指令运行不同的子程序,控制电机驱动,实现对小车前进、后退、右转、左转、停止的实时控制。

图1 总体设计框图
2 智能小车模块设计
2.1 微处理器 STC89C52
设计的控制系统采用STC89C52芯片,是一种低功耗、高性能CMOS 8位微控制器。STC89C52使用经典的MCS-51内核,结构简单便于输入与输出,共有40个引脚,与STC89C51相比多了一个中断源和定时计数器。该单片机具有读取和采集小车数据的功能, 根据采集的信号进行控制并针对小车的转速、转向和障碍进行避障等控制。设计中,驱动模块运用了P1.2-P1.7串口;超声波模块运用了P2.0、P2.1串口;避障与循迹模块运用了P3.2、P3.3、P3.4、P3.5串口;蓝牙模块运用了P3.0、P3.1串口,具体如图2所示。

图2 开发板原理
2.2 电源模块
设计中采用2节3.7 V可充锂电池直接供电,由于小车各模块需要5 V的恒压电源供电,通过LM7805降压IC把电池降压输出5 V;而电机驱动电流较大,在设计过程中由驱动模块L293D驱动芯片电池直接供电,可用PWM调整电机转速。
2.3 驱动模块
设计中采用L293D驱动芯片,它是一款双桥驱动芯片,可同时驱动两路直流电机或一路步进电机,输出电流可达600 mA,峰值输出电流可达1.2 A,内部自带ESD保护,模块工作电压5 V,电机的驱动电压范围为4.5~36 V,接线柱输出,方便连接电机。小车通过开发板输出控制信号给L293D,由L293D驱动左右两个减速马达正转或反转来实现小车的前进、后退、左转、右转的实时动作。驱动模块原理如图3所示。

图3 驱动模块原理
2.4 避障模块
设计中采用超声波避障和红外避障传感器共同完成避障。采用前置超声波探头可以测0.2~5 m范围内是否存在障碍物,超声波发射超声波,如果遇到障碍物,超声波反射回来,发射波被超声波回收装置接收后会产生一个电信号然后被转化为高、低电平信号反馈给单片机,高电平则说明遇到了障碍物,根据反馈信号自动完成避障。超声波发射器向某一方向发射超声波,在发射时刻的同时开始计时,超声波在空气中传播,途中碰到障碍物就立即返回来,超声波接收器收到反射波就立即停止计时。超声波在空气中的传播速度为340 m/s,根据计时器记录的时间t,就可以计算出发射点距障碍物的距离s,即:s=340t/2 。超声波原理图如图4所示。

图4 超声波原理
红外避障传感器具有一对红外信号发射与接收二极管,发射管发射一定频率的红外信号,接收管接收这种频率的红外信号,当传感器的检测方向遇到障碍物时,红外信号反射回来被接收管接收,经过运算放大器的反向放大,信号输出由默认的高电平变为低电平。发光二极管产生了电压差,所以信号指示灯亮,认定前方有障碍,同时信号输出给单片机,单片机根据电平的变化控制电机工作实现避障。红外接收原理图如图5所示。

图5 红外接收原理
2.5 循迹模块
此设计采用红外循迹传感器,当检测到障碍物时,立即避开行驶。黑线的检测原理是红外发射管发射光线到路面,红外光遇到白底则被反射,接收管接收到反射光,经施密特触发器整形后输出低电平;当红外光遇到黑线时则被吸收,接收管没有接收到反射光,经施密特触发器整形后输出高电平。产生的信号输出给单片机,单片机根据电平的变化控制电机工作实现避障。红外避障与循迹反馈模块原理如图6所示。

图6 红外避障与循迹反馈模块原理
2.6 蓝牙模块
此设计采用HC-06从机蓝牙模块,引出接口为VCC、GND、TXD、RXD、预留LED状态输出脚,单片机可以通过该脚判断蓝牙是否已经连接,LED闪烁表示没有蓝牙连接,常亮表示蓝牙已经连接并打开了端口。蓝牙模块TXD和RXD先不接,把小车端程序烧写进开发板后再接线,蓝牙的TXD接开发板P3.0,蓝牙RXD接开发板P3.1。通过手机的蓝牙来控制小车的运动,先在安卓手机上安装蓝牙APP,打开蓝牙功能且此时小车通电,搜索蓝牙设备,小车上蓝牙模块的名称为HC-06,选择后进行连接,连接成功后通过手机蓝牙APP就可以控制小车。蓝牙模块原理如图7所示,手机APP控制小车操作界面如图8所示。
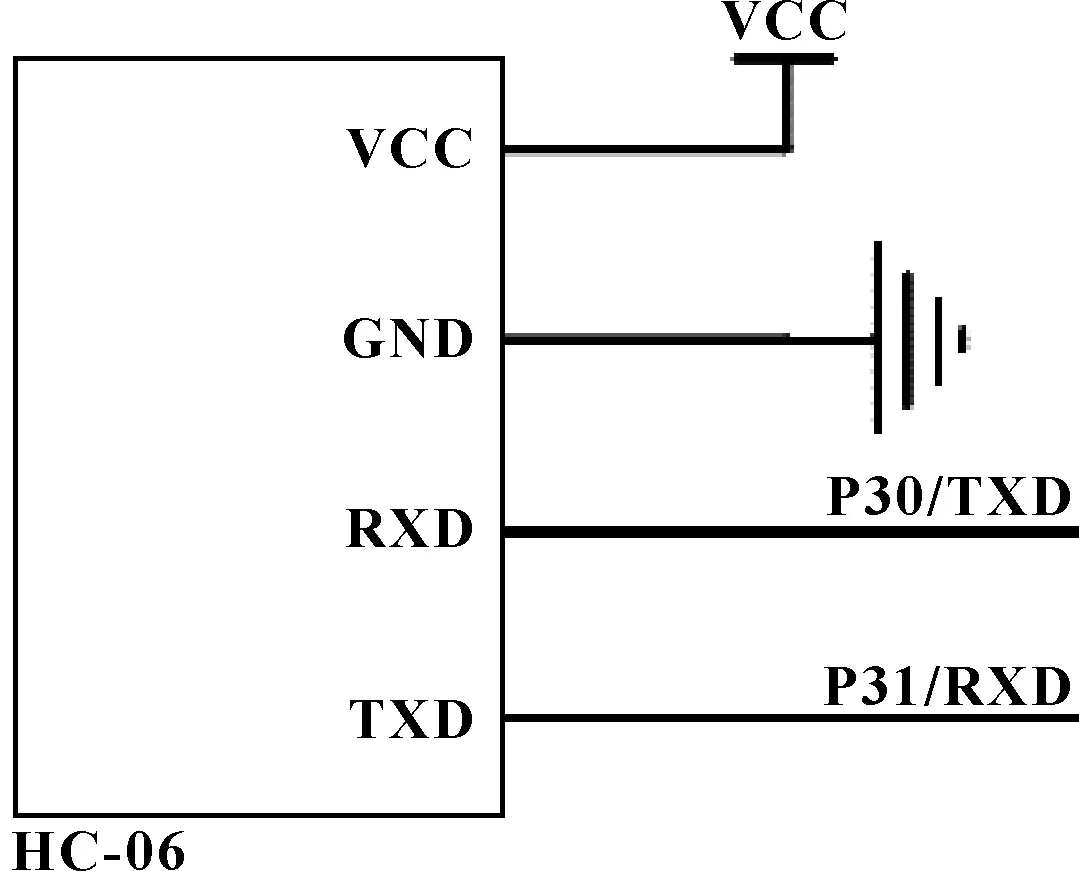
图7 蓝牙模块原理

图8 手机端操作界面
3 结束语
基于蓝牙控制技术设计智能小车控制系统,利用STC89C52芯片、电源模块、驱动模块、避障模块、循迹模块、蓝牙模块,在装有蓝牙APP的安卓手机通过将控制命令发送给小车蓝牙模块,蓝牙模块把信号传输给单片机进行处理,单片机根据传递过来的指令运行不同的子程序,控制电机驱动,实现对小车前进、后退、右转、左转、停止的实时控制。将手机变为遥控器,为其他便利人们生活的智能设备的设计提供了参考。
猜你喜欢
工业设计(2022年7期)2022-08-12 13:18:58
湘潭大学自然科学学报(2022年2期)2022-07-28 05:26:46
快乐语文(2020年36期)2021-01-14 01:10:32
科学大众(2020年17期)2020-10-27 02:49:02
文苑(2018年22期)2018-11-19 02:54:18
家庭影院技术(2018年10期)2018-11-02 05:35:26
电子测试(2018年15期)2018-09-26 06:01:14
电子制作(2018年8期)2018-06-26 06:43:02
家庭影院技术(2018年3期)2018-05-09 07:06:11
电子制作(2017年1期)2017-05-17 03:54:20
