仿乌贼水下机器人设计与控制
2020-01-15 08:10:30张天栋王睿王硕
数据与计算发展前沿 2019年6期
张天栋,王睿,王硕,3
1.中国科学院自动化研究所,复杂系统管理与控制国家重点实验室,北京 100190 2.中国科学院大学,北京 100049 3.中国科学院脑科学与智能技术卓越创新中心,上海 200031
引言
水下机器人作为一种可在水中移动,具有一定感知能力,可辅助或代替人类完成多种任务的高技术装备,在海洋研究、海洋开发、海洋环境保护等领域具有重要的应用价值[1-2]。为满足一些特定任务要求,例如水下设备检修、海产品捕捞等,水下机器人会配备机械手臂,构成水下作业机器人。目前大多数水下作业机器人推进系统为螺旋桨推进器,结合可操纵的舵面产生机动控制力[1]。这种设计对于以巡航速度行驶于空旷平静海域的水下作业机器人是经济有效的。但水下作业机器人在执行特定任务时,往往需要在有扰流的水中低速运动或悬停,此时这种依赖于流体在操纵舵面上流动产生机动控制力的推进方式难以满足实际工作需求。此外,水下作业机器人低速运动时,螺旋桨会处于非全程旋转的工作状态,由于非稳定流模式下螺旋桨的“颤搐”运动,其效率将显著降低,并且产生难以预测的流体脉冲。
水下仿生机器人的设计思想是以自然界中鱼类为原型,通过观察、模仿其身体形态和运动特征,采用现代电子工程技术构建出与其形态、运动方式、功能等方面相似的机器人系统。自然界中,一些鱼类进化出柔性波动长鳍和相对刚性的身体,通过在长鳍上产生行波进而产生推力。柔性长鳍一般位于鱼体背侧、腹部、背腹侧或左右两侧,这些鱼类被称为中央鳍/对鳍(Median/Paired Fin,MPF)推进模式鱼类[3]。
近年来,随着生物科学、机械制造科学、流体力学、控制科学、材料科学、电子技术等学科的发展和融合,国内外针对仿MPF 鱼类波动鳍推进水下机器人的研究工作不断深入,研制了多种波动鳍推进水下机器人。英国赫瑞瓦特大学的Sfakiotakis等人于2001年设计了一种长鳍驱动装置[4],通过气动装置驱动8 个并行排列的鳍条实现长鳍的波动,能够产生与频率和波动幅度近似线性关系的推力。美国西北大学于2014年研制了最新一代仿黑魔鬼刀鱼波动鳍推进水下机器人[5],该原型机柔性长鳍由32根鳍条构成,每根鳍条由一个直流电机单独驱动。国内方面,国防科技大学于2003年率先展开针对仿生波动鳍推进水下机器人的研究工作,最新研制的一种波动鳍推进水下机器人,由两条对称安装于本体两侧的波动长鳍作为动力装置,通过双波动鳍协调控制,能实现对机器人的速度和航向控制[6]。浙江大学于2012年研制了一种波动鳍推进水下机器人,该机器人只由头尾两根刚性鳍条组成长鳍,分别由一个电机驱动,依靠柔性鳍自身与流体的相互作用传递行波来实现推进[7]。中国科学院自动化研究所一直致力于波动鳍推进水下机器人的研究,模仿鳐鱼研制出靠一对波动胸鳍推进的水下机器人,每侧长鳍由6根鳍条组成,实现了波动鳍推进水下机器人进退、转向、浮潜等多种模态三维运动控制[8]。
本文在模块化波动鳍水下推进器设计方案基础上[9],以乌贼为仿生对象,构建仿乌贼运动的仿乌贼水下作业机器人,并针对其基本运动控制方法展开研究。首先,将两个模块化波动鳍水下推进器对称安装在水下作业臂系统两侧,构建仿乌贼水下作业机器人,相比于传统的螺旋桨推进的水下作业机器人,具有更优良的低速运动稳定性和抗扰性能。其次,建立仿乌贼水下作业机器人系统模型,包括水下移动作业机器人动力学模型、双波动鳍运动学模型以及波动推进力/力矩―行波参数映射模型,为后续多模态运动及深度闭环运动等控制方法研究打下基础。最后,进行了仿乌贼水下作业机器人不同模态运动以及深度闭环运动控制实验,实验结果显示仿乌贼水下作业机器人具有良好的运动能力。
1 系统设计
1.1 机械结构设计
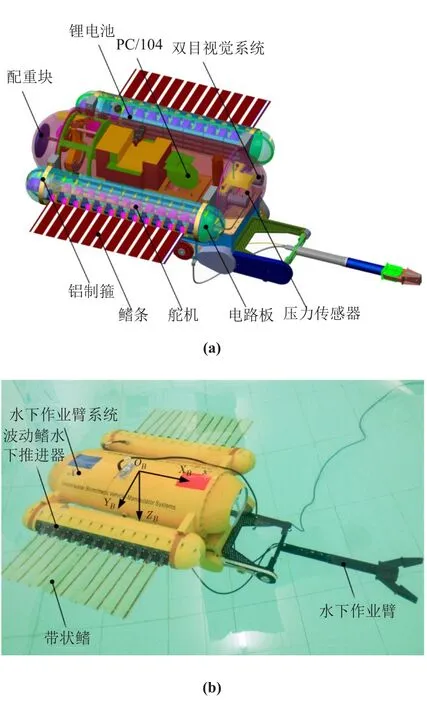
图1 仿乌贼水下作业机器人机构设计。(a)三维机械结构图 ;(b)原型机照片。Fig.1 Mechanism design of squid-like underwater robot.(a)Three-dimensional mechanical structure;(b)Photo of prototype.
图1给出了仿乌贼水下作业机器人机械结构设计。仿乌贼水下作业机器人机构设计基于模块化设计思想,主要可分为三个模块:包括水下作业臂系统和两个波动鳍水下推进器。水下作业臂系统机械结构上通过电机与驱动器集中后置,具有轻量化臂身,从而减少作业臂与水下作业臂系统本体之间的耦合,有利于进行快速的水下抓取作业。水下作业臂系统还装有PC/104工控机、双目视觉系统、压力传感器、直流有刷电机、驱动器、编码器、减速箱、电池、配重块等设备。关于水下作业臂系统详细的机构设计可以参见文献[10]。
另一方面,通过圆形铝制箍将两个模块化波动鳍水下推进器对称安装在水下作业臂系统两侧,即可构建仿乌贼水下作业机器人。波动鳍水下推进器可方便地取下并重新装配,这有利于仿乌贼水下作业机器人后期的维修与更新。
仿乌贼水下作业机器人原型机的主要技术参数如表1所示。
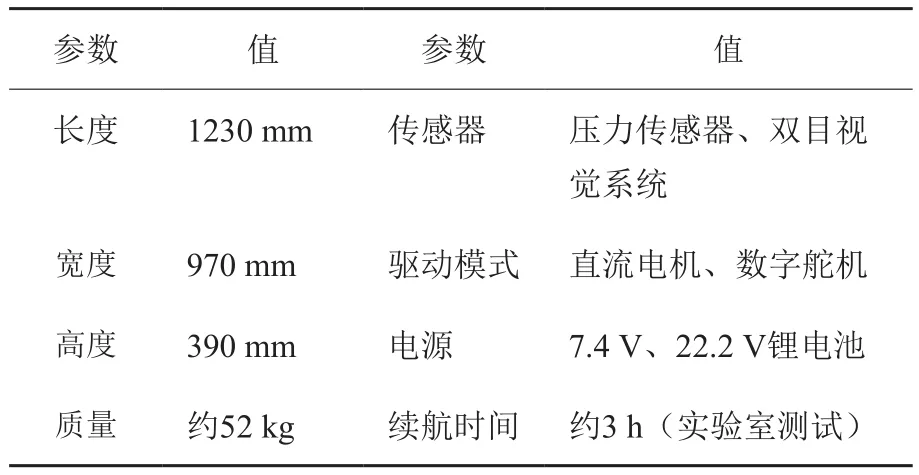
表1 仿乌贼水下作业机器人原型机技术参数Table 1 The technical parameter of squid-like underwater robot
1.2 驱动系统设计
如图2 所示,仿乌贼水下作业机器人的驱动系统设计也基于模块化思想,各个模块之间通过串口或网口连接进行数据交换,这有助于各模块的维护与更新。
在水下作业臂系统本体中,主控制器采用PC/104工控机(研华~3363D),其主要实现仿乌贼水下作业机器人运动控制、传感数据处理、数字图像处理、水下作业臂运动控制等功能。双目视觉系统用来进行目标识别和定位,其通过USB接口和PC/104工控机连接。PC/104工控机可通过网口连接至远程控制台,从而可以在远程控制台实现对仿乌贼水下作业机器人的远程手动控制。
对于水下作业臂,直流电机驱动器1通过串口连接至PC/104工控机。其余的电机驱动器之间通过CAN总线相互连接。直流电机角度控制采用转速位置双闭环控制结构,从而可通过齿轮、同步带轮等传动机构实现对作业臂各个关节角度的高速高精度控制。
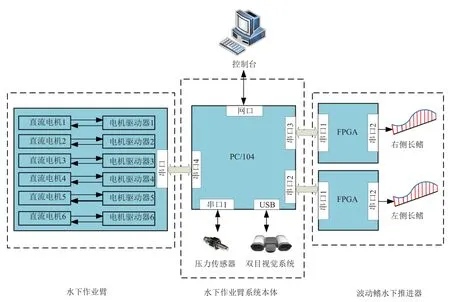
图2 仿乌贼水下作业机器人驱动系统配置Fig.2 Driver system configuration of squid-like underwater
PC/104工控机通过两个串口分别连接两侧波动鳍水下推进器,从而可实现对两侧长鳍的波动运动控制。
2 系统建模
考虑到仿乌贼水下作业机器人结构的特殊性,分别针对水下作业机器人和波动推进系统进行建模。首先建立水下移动作业机器人动力学模型。再针对双波动鳍建立其波动运动的运动学模型。最后,基于模糊数学方法,建立波动推进力/力矩―行波参数映射模型。
2.1 动力学模型
为建立水下移动作业机器人动力学模型,我们做如下假设与简化:(1)本文所考虑的水下作业机器人具有较大的稳心高度,具有较好的静态稳定性,因此,我们忽略其横滚和俯仰自由度上的运动;(2)假设浮潜运动与进退运动、侧移运动及偏航运动无耦合关系;(3)本文所考虑的水下作业机器人运动速度较小,因此忽略非线性阻尼作用,仅考虑线性阻尼作用。基于以上假设,水下移动作业机器人动力学模型可表示为[11]:
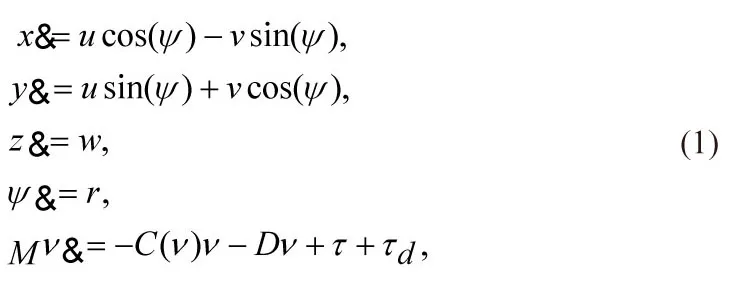
且有,
2.2 双波动鳍运动学模型
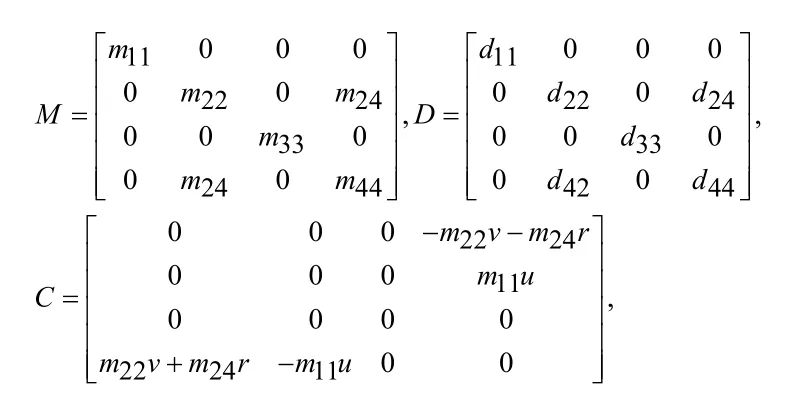
仿乌贼水下作业机器人两侧长鳍按正弦波形波动。同时,为避免产生较大的侧移运动和横滚运动进而影响水下作业机器人的运动稳定性,令两侧波动鳍的行波幅值、偏置角和波长相等。因此,双波动鳍波动运动的运动学模型可表示为:
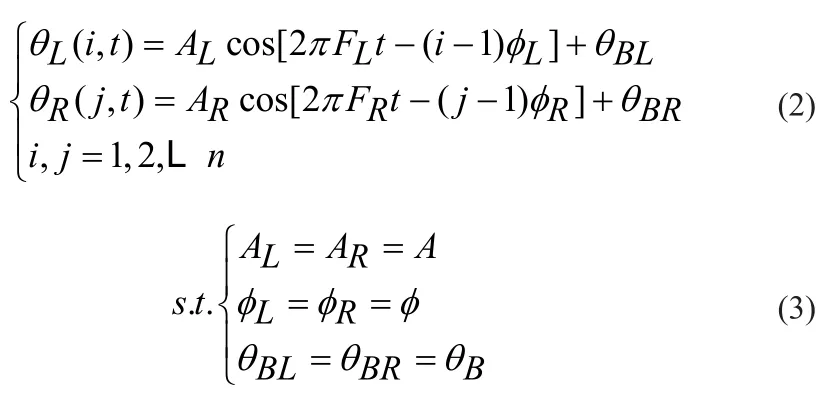
其中θL,θR分别为左右两侧长鳍鳍条的偏转角度,i,j分别表示左鳍第i根鳍条和右鳍第j根鳍条,为时间,n为鳍条个数,F,A,φ,θB分别为波动频率、幅值、相位差以及偏置角。根据上述模型,仿乌贼水下作业机器人运动可由参数FL,FR,A,φ,θB决定,因此,我们选择这五个参数作为水下作业机器人的控制输入。考虑到波动鳍舵机转速约束和鳍膜弹性约束,我们将控制参量的范围限制为:
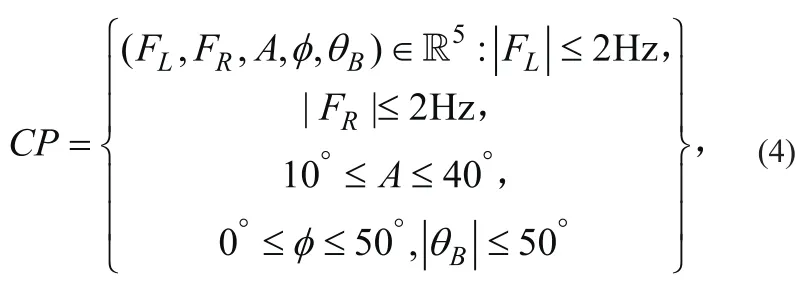
其中频率的符号表示波动鳍产生的行波传播方向。
通过对两侧长鳍进行协调控制,长鳍上可以产生各种波动或拍动运动,进而产生推进力和力矩。仿乌贼水下作业机器人在推进力和力矩作用下,可实现多种游动模态,包括前进/后退游动、上浮/下潜游动、转向游动等。
2.3 波动推进力/力矩―行波参数映射模型
对于仿乌贼水下作业机器人,建立两侧长鳍产生的推进力和偏航力矩至行波参数之间的映射关系对闭环运动控制十分重要。目前还没有成熟统一的方法来定量建立这一非线性关系,因此我们使用基于模糊数学的方法建立波动推进力/力矩―行波参数映射模型[12]。如图3所示,波动推进力/力矩―行波参数映射模型具有3个输入和5个输出。输入包括进退推力τu、浮潜推力τw和偏航力矩τr。输出即为仿乌贼水下作业机器人的行波参数。波动推进力/力矩―行波参数映射模型主要包括4个组成部分,即模糊化、模糊推理、模糊规则库和解模糊化。
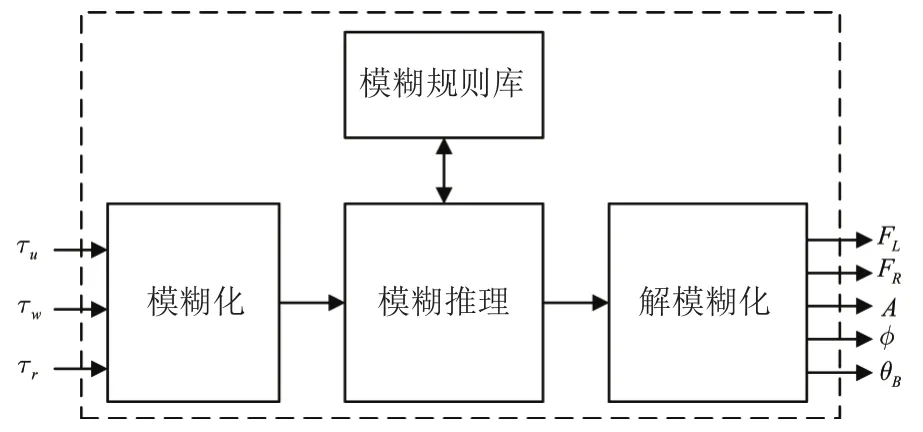
图3 基于模糊数学的波动推进力/力矩―行波参数映射模型结构框图Fig.3 Structure block diagram of the mapping model from propulsive force/torque to traveling wave parameter based on fuzzy mathematics
首先让仿乌贼水下作业机器人在一些行波参数下进行游动,并计算游动的平均速度。然后根据平均速度和仿真分析估计在此行波参数下产生的推进力和推进力矩。进而确定各个输入输出变量的论域,并根据三角形隶属度函数进行模糊化。
模糊规则库是模糊模型的核心,主要依据以下4个原则建立模糊规则库:
(1)浮潜力与长鳍偏置角紧密相关。在一定范围内,当浮潜推力变大时,偏置角也应增大,反之亦然。
(2)当偏航力矩较小而进退推力较大时,两侧长鳍行波传播方向应一致,通过改变两侧行波频率来同时输出较大的进退推力和较小的偏航力矩。
(3)航向控制和深度控制优先级高于进退控制。即当需要产生的偏航力矩、浮潜推力、进退推力都较大时,优先保证产生较大的偏航力矩和浮潜推力。
(4)当进退推力和偏航力矩都较小时,相邻鳍条间的相位差变小,行波频率、幅值和偏置角根据浮潜推力确定。即当需要的浮潜推力较大时,行波频率、幅值和偏置角设置为较大值,反之亦然。
采用Mamdani法进行模糊推理,并采用中心平均法进行解模糊运算以获得两侧波动鳍行波参数。
3 实验
根据仿乌贼水下作业机器人系统建模结果,首先进行系列实验探索其不同模态下的运动性能,主要包括前进、后退、转向、上浮、下潜等运动模态。
因为深度闭环控制对水下作业机器人执行水下作业任务具有重要意义。本章同时使用文献[13]第四章提出的基于自抗扰控制技术的深度控制方法,在仿乌贼水下作业机器人上进行了深度闭环控制实验。
3.1 多模态运动控制实验
3.1.1 进退运动
基于双波动鳍运动学模型,当仿乌贼水下作业机器人两侧鳍行波频率相等,偏置角均为零时,且行波都从头部朝尾部传播时,水下作业机器人将进行前进运动。图4是行波参数为时,仿乌贼水下作业机器人进行前进运动的实验视频截图序列。当两侧鳍行波从尾部向头部传播时,水下作业机器人将进行后退运动,图5给出了后退运动的实验视频截图序列。为验证仿乌贼水下作业机器人在开放水域的运动能力,我们在十三陵水库进行了野外湖试,图6为野外实验中进行前进运动的视频截图序列。
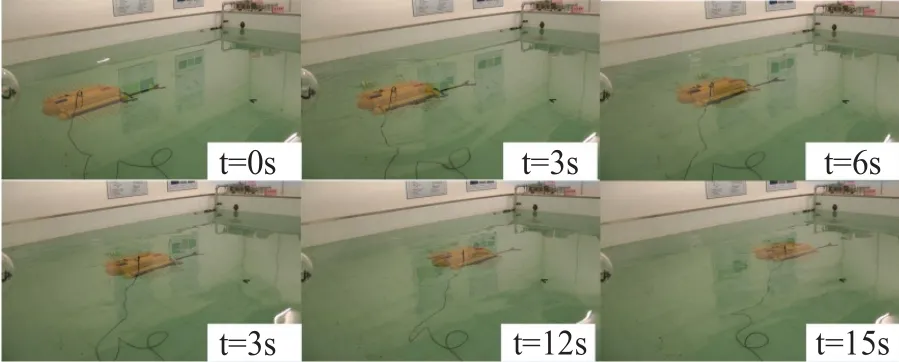
图4 前进运动实验视频截图序列Fig.4 Video capture sequence of forward motion experiment
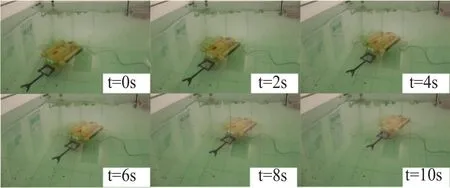
图5 后退运动实验视频截图序列Fig.5 Video capture sequence of backward motion experiment

图6 前进运动野外实验视频截图序列Fig.6 Video capture sequence of forward motion experiment in the field
3.1.2 转向运动
在进退运动基础上,改变左右两侧波动鳍行波频率,可使两侧波动鳍产生大小不同的推力,进而产生偏航力矩,使得仿乌贼水下作业机器人进行转向运动。图7是行波参数为时,仿乌贼水下作业机器人进行转向运动的实验视频截图序列。图8为野外实验中进行转向运动的视频截图序列。
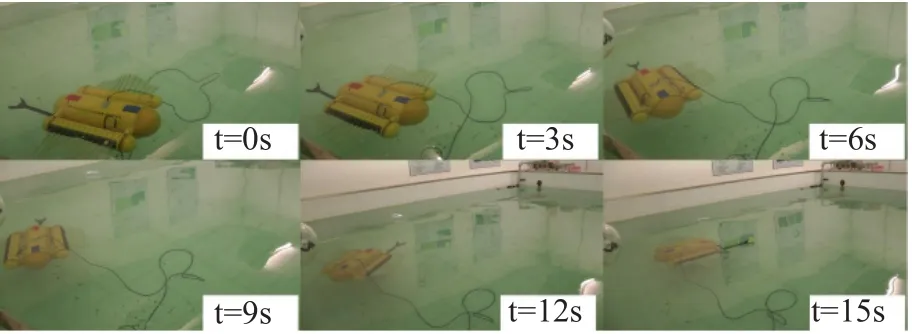
图7 转向运动实验视频截图序列Fig.7 Video capture sequence of turning motion experiment
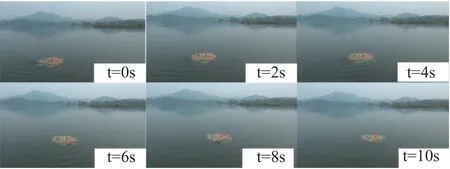
图8 转向运动野外实验视频截图序列Fig.8 Video capture sequence of turning motion experiment in the field
3.1.3 浮潜运动
当仿乌贼水下作业机器人两侧鳍行波频率相等,相位差均为零,且偏置角为正时(两侧鳍条向下偏转),两侧鳍进行拍动运动,此时水下作业机器人将进行垂直上浮运动。当偏置角为负时,此时水下作业机器人将进行垂直下潜运动。图9给出了仿乌贼水下作业机器人进行垂直下潜运动的实验视频截图序列。
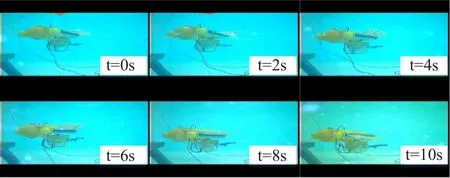
图9 下潜运动实验视频截图序列Fig.9 Video capture sequence of diving motion experiment
3.2 闭环自主定深控制实验
本节使用文献[13]第四章提出的基于自抗扰控制技术的深度控制方法,在仿乌贼水下作业机器人上进行了深度闭环控制实验,其中深度反馈数据通过深度传感器获得。
相比于传统的PID控制方法,自抗扰控制方法在以下4个方面进行了改进[14]:
(1)PID控制方法让不可跳变的系统输出量来跟踪可跳变的给定值,这是不合理的。自抗扰控制方法通过对给定值安排过渡过程,避免给定值的跳变。
(2)PID控制中要使用误差的微分信号,而缺少提取微分信号的合理方法和合适装置,不能充分发挥误差微分的作用。自抗扰控制方法使用噪声放大效应很低的跟踪微分器、状态观测器或扩张状态观测器来提取误差微分信号。
(3)PID控制中误差反馈律是误差的现在(P)、过去(I)、将来变化趋势(D)的加权线性组合。自抗扰控制方法在非线性领域寻找更合适、更有效率的组合形式来形成误差反馈律。
(4)工程实践表明,经典PID控制中的误差积分反馈对抑制常值扰动的作用是显著的,然而常常使用闭环系统的反应迟钝,容易产生振荡和控制量饱和等副作用。自抗扰控制方法采用扩张状态观测器实时估计出作用于系统的扰动总和并给予补偿,代替误差积分反馈作用。
文献[15]也证明针对波动鳍推进水下航行器基本闭环运动控制,基于自抗扰控制技术的控制方法较基于PID的控制方法能获得更好的控制效果,故本文采用自抗扰控制方法进行仿乌贼水下作业机器人基本闭环运动控制。
图10为深度控制器的结构示意图,其包括一个自抗扰控制器和基于模糊推理的控制量配置模块。自抗扰控制器根据期望深度和当前深度反馈输出浮潜推力τw。通过设置,基于模糊推理的控制量配置模块可将力和力矩形式的控制量映射为仿乌贼水下作业机器人的行波参数。
深度闭环控制实验中,水下作业机器人初始深度为0.187 m,期望深度为0.7 m,控制周期为0.05 s。图11给出了深度闭环控制实验视频截图序列,其中白色虚线表示期望深度。图12为深度变化曲线。实验结果显示,在深度控制器的控制下,水下作业机器人深度值几乎无超调地达到期望深度,然后进入稳态。稳态误差维持在(-0.015 m,0.015 m)范围内,说明能实现对仿乌贼水下作业机器人较为精确的深度控制。
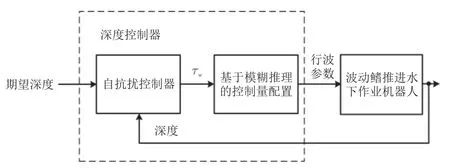
图10 深度控制器结构示意图Fig.10 Structural block diagram of depth controller
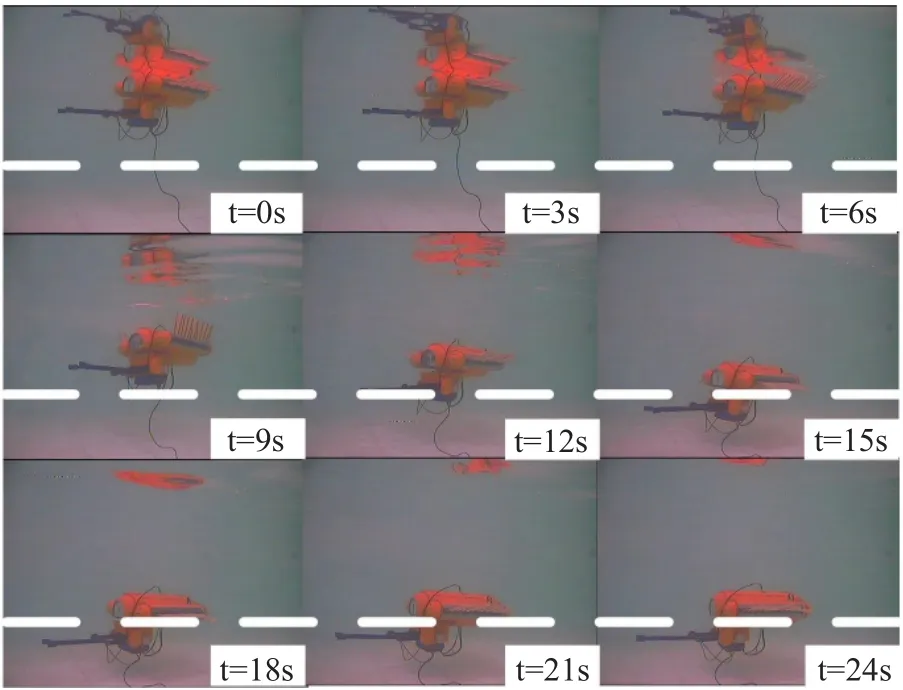
图11 深度闭环控制实验视频截图序列Fig.11 Video capture sequence of depth closed-loop control experiment
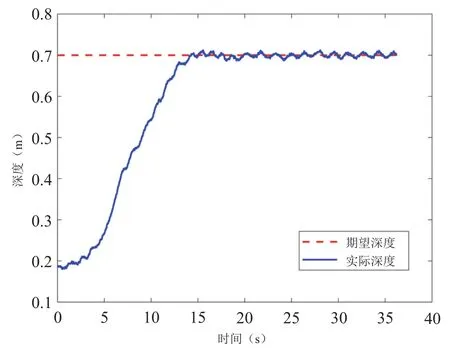
图12 深度闭环控制实验深度变化曲线Fig.12 Depth curve of depth closed-loop control experiment
4 结论与展望
本文基于模块化波动鳍水下推进器构建了一种新型仿乌贼水下作业机器人,模拟乌贼采用MPF推进方式进行运动;并建立了水下移动作业机器人动力学模型、双波动鳍运动学模型和波动推进力/力矩―行波参数映射模型;基于建立的仿乌贼水下作业机器人系统模型,在室内水池和开放水域进行了不同模态运动实验,包括进退、转向、浮潜等运动,并进行了深度闭环控制实验。实验结果显示所构建的仿乌贼水下作业机器人具有良好的运动能力。
当前,仿乌贼水下作业机器人大都采用电机驱动,而鱼类等自然生物以软体、变形体、或刚柔耦合结构实现高性能、高效、高能量密度、安全的驱动、运动,这类生物结构的形变非线性、不确定性、变刚度、弹性、振动等使仿生新型驱动机构在设计、分析和优化等方面面临巨大挑战。可以从流线型外形、低阻材料、刚柔耦合高效传动方式等方面开展研究,以提高仿生水下作业机器人的运动性能。
利益冲突声明
所有作者声明不存在利益冲突关系。
猜你喜欢
基层中医药(2021年8期)2021-11-02 06:24:56
今日农业(2019年12期)2019-08-13 00:50:14
文学少年(原创儿童文学)(2019年1期)2019-05-23 09:37:26
中国化肥信息(2019年3期)2019-04-25 01:56:16
环境保护与循环经济(2017年2期)2017-09-26 11:52:16
山东青年(2016年12期)2017-03-02 18:22:48
家教世界·创新阅读(2016年12期)2017-01-09 18:30:06
光学精密工程(2016年6期)2016-11-07 09:08:02
航天制造技术(2016年6期)2016-05-09 08:32:51
阅读与作文(小学高年级版)(2016年1期)2016-03-04 23:58:56