基于背景纹理的轿车车标定位方法①
2020-01-15 06:45李映东吴晓红卿粼波何小海
计算机系统应用 2020年1期
李映东,吴晓红,卿粼波,何小海
(四川大学 电子信息学院,成都 610065)
车辆信息的采集和识别已成为智能交通系统中至关重要的部分.然而已有的车牌识别系统受到套牌车的影响,无法准确的获取车辆信息,面对这种情况,基于车辆图像的车标识别受到了越来越多的重视,它已成为车辆识别系统中不可缺少的关键一环.而作为车标识别的先决条件,车标定位显得格外重要,它是正确识别车标的首要条件和重要保障.但由于车标种类繁多、大小形状不一、纹理不定,特别是车标背景散热片的干扰,对车标的准确定位产生了影响.目前已提出了很多车标定位的研究方法,如:基于SVM的车标定位方法[1,2];基于DCT域的车标定位方法[3,4];基于PCA的车标定位方法[5,6];基于背景纹理分析的车标定位方法[7,8];基于边缘检测的车标定位方法[9–12];基于模板匹配的车标定位方法[13]等.但现有的多数车标定位方法只适合用于简单的车标背景,且光照条件要求较高,局限性比较大.如文献[7]通过动态模板来确定水平纹理背景车标的左右边界以及基于边缘密度来实现垂直纹理背景车标的精确定位,这种方法受光照影响比较大,对于有反光现象的车标背景,定位效果较差;文献[8]对垂直纹理背景消融后,通过自适应二值化和形态学实现车标的精确定位,但是当散热片纹理有一定角度时,会影响定位效果;文献[12]利用Law算子对车标背景噪声进行抑制后采用中值滤波来去除干扰,文献[13]采用边缘检测和以部分背景散热片作为模板匹配来定位车标的位置,这些方法都对车标背景散热片纹理要求较高,当散热片纹理并不是完全水平或者垂直而是有一定角度时定位效果较差.
针对现有车标定位方法的问题,通过构建车标及其背景图像的数据集(部分如图1),进过大量实验并进行数据分析,本文提出了一种新的车标定位方法.先通过车标与车牌的空间位置关系的先验知识,得到车标的粗定位区域.再对粗定位区域的图像进行水平投影和垂直投影,根据水平投影的差异和垂直投影的方差大小判断车标背景散热片的纹理方向.利用Sobel算子对不同类别的背景散热片进行消融,并采用邻间二值化方法突出车标部分,同时结合一种基于投影的去噪方法对噪点进一步消除,从而实现车标的精确定位.
1 车标背景纹理的判别
车标图案通常位于车首和车尾,位于车首部分的车标特征更加明显,所以本文根据车首图像实现车标的粗定位.基于先验知识可以知道,通常轿车车标在车牌正上方的0.5~3.0个车牌的高度范围内[14];此外,车标的宽度一般不会超过车牌.因此,可以根据车牌的位置对车标进行粗定位.如图2所示是通过已有的车牌定位算法[15,16]得到的车标粗定位区域.


图2 车标的粗定位
本文依据车标背景特征将车标背景分为三大类:无散热片背景、类水平纹理散热片背景和垂直纹理散热片背景.无散热片是指车标背景没有散热片或者散热片在车标下面(如图3(a)).类水平纹理散热片(如图3(d))是指各种水平方向纹理(散热片角度在0度到45度之间)和网状纹理散热片.垂直纹理散热片是指其主要散热片角度在45度到90度之间的(如图3(g)).
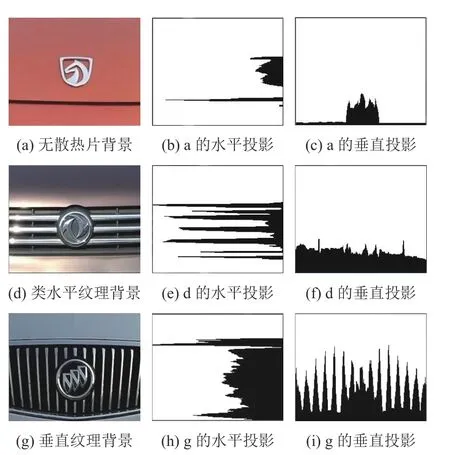
图3 各种车标背景的水平投影和垂直投影
车标背景的类别可依据粗定位区域的投影来判断.首先根据无散热片背景的特性,本文利用粗定位区域的水平投影判断车标背景有无散热片.由于实际当中光照不均匀的影响可能导致车标的投影不完全,所以先对粗定位区域的二值化图像进行膨胀,然后进行水平投影.判别条件如下:

其中,T是对车标粗定位区域进行水平投影,从上至下的首段连续不为零区域,S是这段区域的最大投影长度,H是粗定位图片高度,W是粗定位图片宽度.如图3所示是各种车标背景及其投影.
对于车标背景有散热片的,本文利用其粗定位区域的垂直投影方差来判断散热片的种类是类水平纹理还是垂直纹理.通过实验可以发现这两类散热片的垂直投影方差差异性较大,如图3(f)和图3(i)所示.分类判别条件如下:

其中,V是车标粗定位左起1/3区域垂直投影的方差,M是方差阈值并由实验得出,实验发现M=2.8可以很好的区分出背景的散热片纹理.如图4是车标背景纹理的判别流程图.
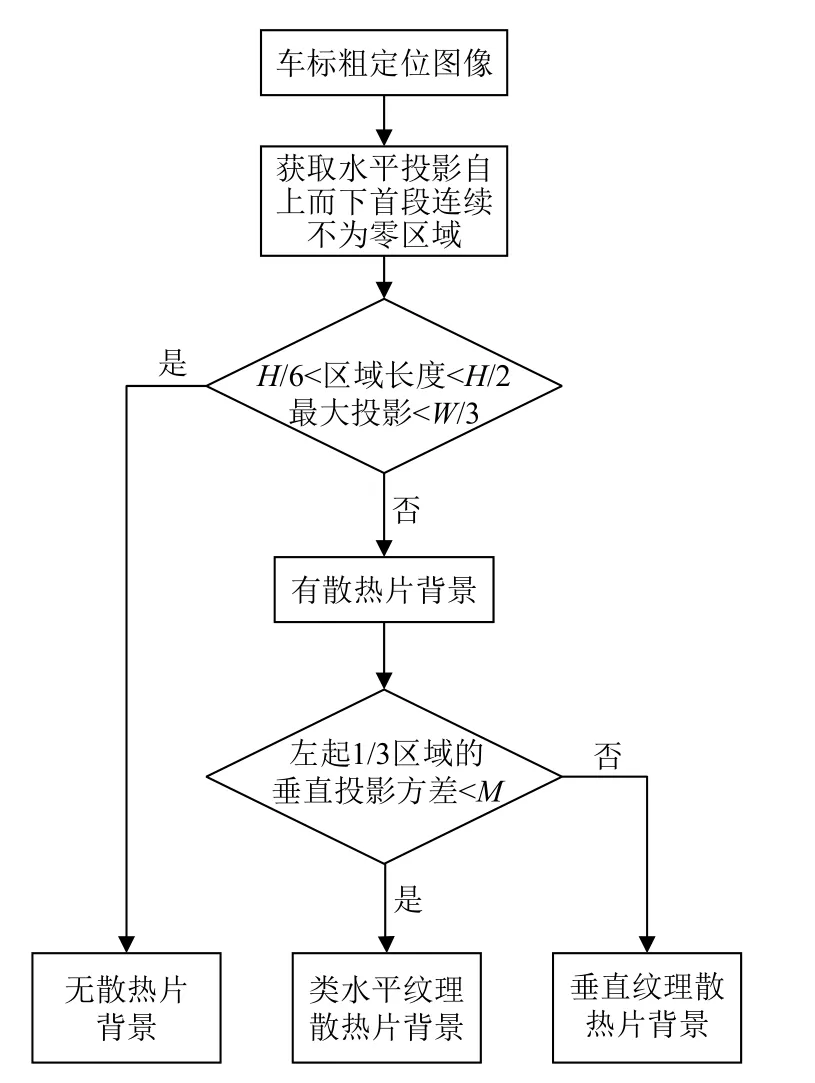
图4 车标背景纹理判别流程图
2 车标的精定位
根据水平投影和垂直投影上的特性将车标背景分类后,分别对不同种类的车标背景进行处理,从而达到车标的精确定位.如图5是车标精确定位整体框图.
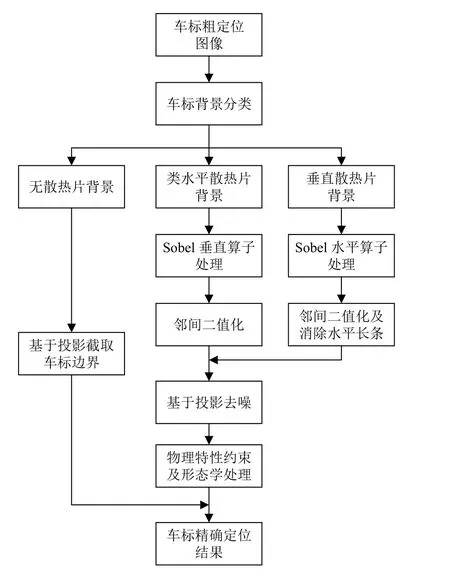
图5 车标精确定位整体框图
2.1 无散热片背景的车标精定位
对于背景无散热片的,由于没有散热片的干扰,噪声较小,可根据粗定位区域的投影来确定车标的准确位置.由于实际当中光照不均匀的影响可能导致车标的投影不完全,所以先对粗定位区域的二值化图像进行膨胀,然后在其水平投影上取出自上而下首段连续不为零的区域,再对这段区域进行垂直投影,截取垂直投影中连续不为零的最大区域,得到的即是精确定位的结果,如图6所示.
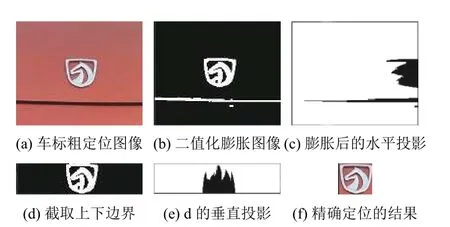
图6 无散热片背景的车标精确定位
2.2 类水平纹理背景的车标精定位
对于车标背景散热片是类水平纹理的,首先利用Sobel垂直算子对其进行消融.通常消融的结果噪声较大,文献[7]中采用最大类间方差法进行二值化分割,可是其对光照和背景的要求很高,难以突出车标部分.为了最大限度的消除背景噪声的影响,本文采用了一种适用于车标定位的邻间二值化方法:
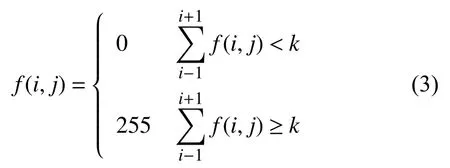
其中,f(i,j)是点(i,j)的灰度值,k是灰度值阈值.由于Sobel垂直算子消融后的图像在垂直方向上保持着边缘特征,基于这一特性,可以将(i,j)与其上下两个点的灰度值相加,当相加结果小于k,即视为噪点.经过实验发现k=400时可以在保证车标区域的基础上很好的去除边缘噪声.
与OTSU(最大类间方差法)相比,本文方法适应性更广,特别是当背景散热片有一定的角度和背景散热片是网状的,效果更加突出.如图7是OTSU与本文邻间二值化算法的对比.
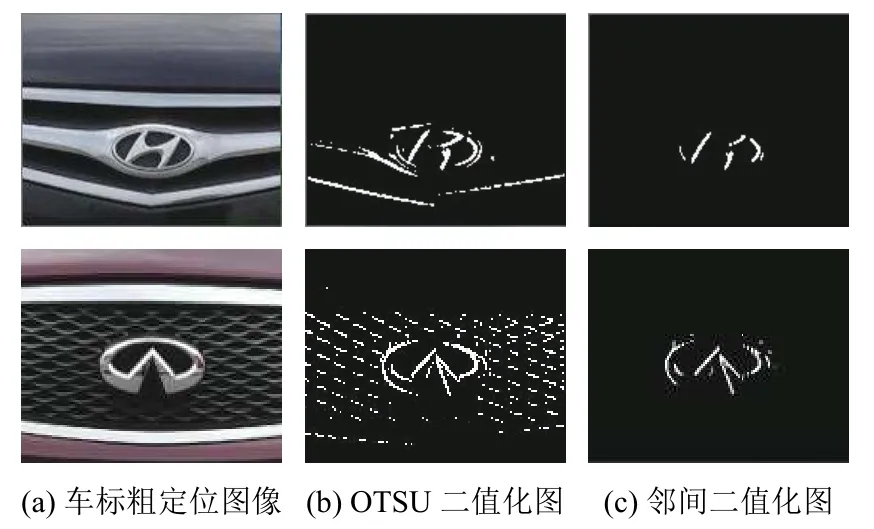
图7 邻间二值化与OTSU效果对比
通过Sobel算子对车标背景散热片消融,并进行邻间二值化,然后对图像进行去噪.对于一些背景纹理比较复杂的车标,文献[8]单一的运用形态学去噪效果并不是很好.本文根据类水平纹理的边缘特征,采用了一种基于投影的去噪方法.类水平纹理邻间二值化后的车标部分在水平投影上具有连续性且长度最大,在垂直投影上分为几个连续区域.基于这一特性,可以取水平投影中连续不为零的最大区域,其他区域可视为噪点并去除.
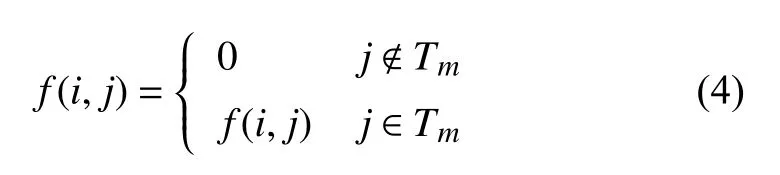
式中,f(i,j)是点(i,j)的灰度值,Tm是采用邻间二值化后在其水平投影上连续不为零的最大区域.结果如图8(d)–8(f)所示.
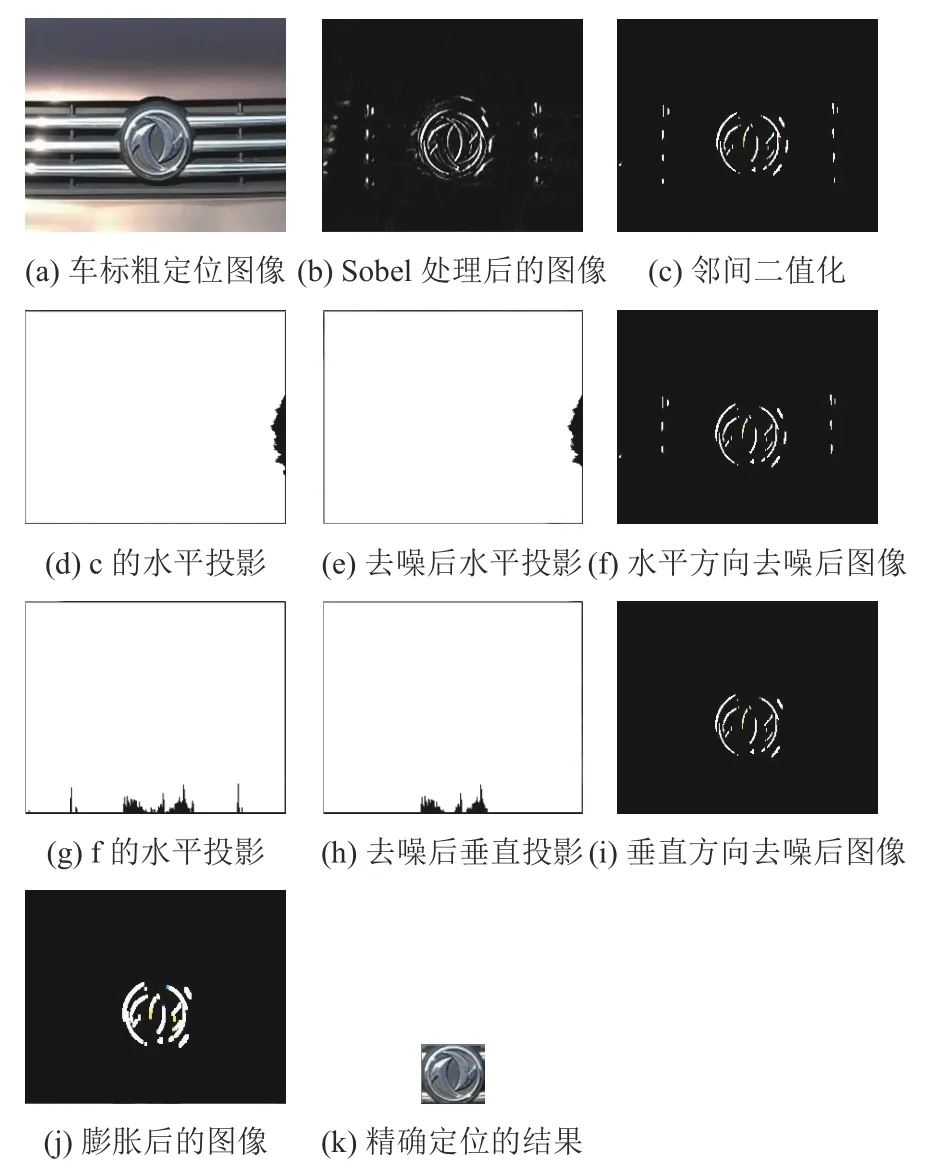
图8 类水平纹理背景的车标精确定位
对经过水平方向上去噪之后得到的图像进行垂直投影.取垂直投影中连续不为零的最大区域,然后与各连续区域对比,小于最大区域长度的1/5视为噪点.
式中,f(i,j)是点(i,j)的灰度值,W(i,j)是点(i,j)所在的区域,Wm是垂直投影上连续不为零的最大区域.结果如图8(g)–8(i)所示.对经过去噪之后的图像膨胀,取其最大的外接矩形,即是车标精确定位的结果,如图8所示.
根据车标的物理特性,其轮廓具有一定的对称性,本文对车标的对称性加以约束,以减小冗余,使车标的最终定位更加精确:

式中,Lleft是车标左边界到粗定位区域中轴线的距离,Lright是车标右边界到粗定位区域中轴线的距离.
2.3 垂直纹理背景的车标精定位
对于车标背景散热片是垂直纹理的,利用Sobel水平算子对其进行背景消融,并采用邻间二值化.与类水平纹理不同的是,垂直纹理邻间二值化是取 (i,j)与该点左右两个点的灰度值相加,当相加的值小于k即视为噪点.
在垂直纹理的散热片背景中,车标下方或者上方通常会有一条水平长条,对车标的精确定位有所影响.因此,在邻间二值化之后,需要对其进行消除.实际中这条水平长条大多数并不是完全水平的,而是具有一定的幅度,且其在水平投影上的值与车标部分差异明显,因此,当相邻两行的投影值相加结果大于粗定位图像宽度的1/5,即视为长条部分并去除.
其中,f(i,j)为点(i,j)的灰度值,h(i)为粗定位区域水平投影,W为粗定位区域宽度.
垂直纹理预处理后的车标部分在垂直投影上具有连续性且长度最大,在水平投影上分为几个连续区域.基于这一特性,可以取垂直投影中连续不为零的最大区域,其他区域可视为噪点并去除.对经过垂直方向上去噪之后的图像进行水平投影,取投影中长度最大的连续区域,然后与各连续区域对比,小于最大区域长度的1/5视为噪点.最后对经过去噪之后的图像膨胀,取其最大的外接矩形,即是车标精确定位的结果,如图9所示.
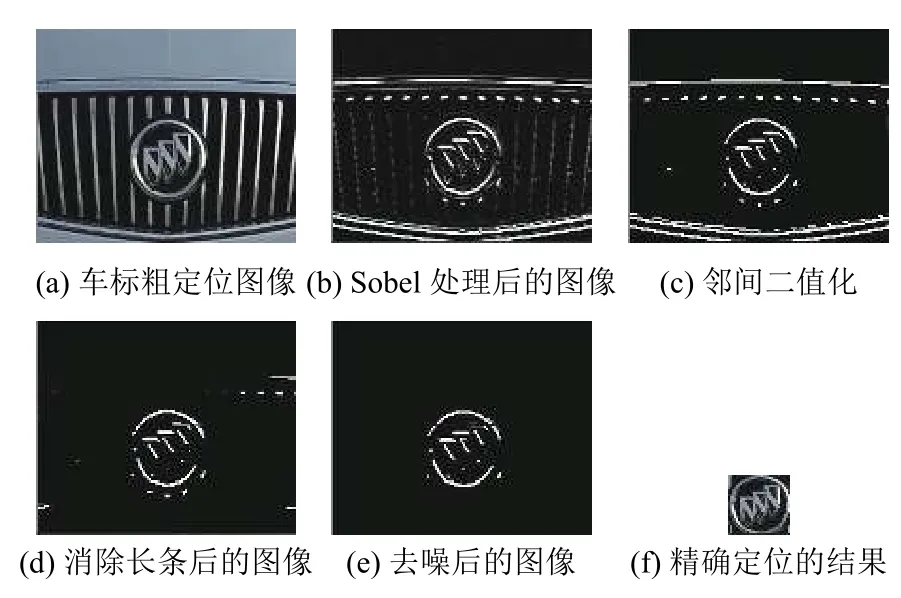
图9 垂直纹理背景的车标精确定位
3 实验结果及分析
为了验证本文算法的有效性,从某城市主要道路随机采集了轿车车头图像,并准确获取了含有车标的粗定位图像1000张,车标种类32种.包含了实际运用中常见的轿车车辆散热片背景.本文将其分为三类:无散热片背景101张,类水平散热片背景612张,垂直散热片背景287张.采用本文算法对这1000张图像进行车标的精确定位.由于本文算法是对现有的基于背景纹理分析的车标定位方法[7,8]的进一步改进,故采用本文同样的实验数据与文献[7,8]进行对比(C++实现测试),结果如表1所示.

表1 车标定位准确率对比(单位:%)
文献[7]采用了动态模板定位类水平纹理边界的方法,同时对于垂直纹理引入了边缘颗粒度的概念,但是当背景散热片纹理比较复杂时,定位效果并不好,且受光照的影响较大.文献[8]采用不同的滤波算子对不同的车标背景散热片进行消除,并根据车标的物理特性和自适应二值化实现精确定位,但其对于车标背景散热片是网状的定位率较低.本文方法基于投影的车标背景分类对不同的背景散热片进行消除,采用了一种邻间二值化和基于投影的去噪方法,能很好的消除车标背景噪声的影响,适用性广,对车标的定位更加准确.由表1可知,本文算法的车标定位准确率明显优于文献[7,8].
本文算法受光照影响较小,对于多数存在反光现象的背景能够实现车标精确定位,如图10(a)所示.但是对于反光现象特别严重的,如图10(b)所示,定位效果较差,主要是因为反光的面积太大,其边缘与背景纹理的方向差别较大,无法对其很好的消融,造成定位错误,这也是以后需要进一步改进的地方.
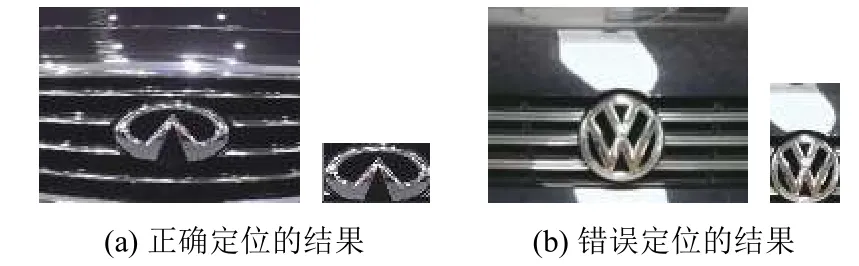
图10 反光背景的车标定位
4 结束语
本文提出了一种基于背景纹理的轿车车标定位方法.首先依据车标和车牌之间的空间位置关系的先验知识,获取车标的粗定位区域,然后依据其在水平投影与垂直投影上的差异性将车标背景分为三大类.运用Sobel算子分别对不同种类的散热片进行消融;为了更好的去除散热片背景对定位车标的影响,本文引入了一种邻间二值化方法,既有效的保存了车标部分的信息,又能更好的消除背景的噪点,特别是对网状和有一定角度的背景散热片的效果尤其突出.同时采用基于投影的去噪方法消除车标周围残留的噪点,并利用车标的物理特性和形态学对图像进一步处理,以此实现车标的精确定位.本文提出的车标定位方法实用性强,适用于不同的车标背景,特别是对背景比较复杂的(如网状散热片背景)车标定位效果优于其它方法.实验表明,本文的车标定位方法是准确、高效的.
本文算法在实际的实验中效果很好,但对于反光现象特别严重的车标粗定位图像,定位准确率相对较低,需进一步改进.
猜你喜欢
世界汽车(2022年3期)2022-05-23
电脑爱好者(2020年6期)2020-05-26
电脑报(2019年16期)2019-09-10
动漫界·幼教365(中班)(2019年3期)2019-06-11
证券市场红周刊(2018年41期)2018-05-14
证券市场红周刊(2018年33期)2018-05-14
证券市场红周刊(2018年5期)2018-05-14
证券市场红周刊(2018年4期)2018-05-14
佛山陶瓷(2016年7期)2016-05-14
学生天地·初中(2014年9期)2014-10-17