
无人机1∶500比例尺测图关键影响因素分析及应用研究
2020-01-14 06:55万雷黄维任宏旭喻守刚
城市勘测 2019年6期
万雷,黄维,任宏旭,喻守刚
(1.长江空间信息技术工程有限公司(武汉),湖北 武汉 430010; 2.长江三峡勘测研究院有限公司(武汉),湖北 武汉 430074)
1 引 言
无人机作为一个新兴的载体,在传统农林作业、工业测量和土地资源调查、智慧城市、数字考古、抢险救灾、三维实景、城市规划、新农村建设、物流配送、地理国情监测等应用中保持强势增长[1]。无人机低空遥感数字航空摄影测量系统已经成为获取地形测量数字成果的重要手段之一,无人机机动灵活、高效快速,无须专用机场起降,可进行手抛起飞、弹射起飞和伞降、滑降以及垂直起降等多种方式,并且基于无人驾驶系统,回避了飞行员人身安全的风险[2~4],因而在小区域和人工作业困难地区快速获取高分辨率影像具有明显优势。随着无人机硬件技术和高精度GNSS定位技术的发展,将高精度GNSS定位模块应用到无人机上,结合GNSS辅助空中三角测量技术,不但可以有效减少像控点的数量甚至免像控,且可以大大提高无人机航测的精度[5]。田超等人的研究,表明拓普康天狼星Pro航空测图系统提供了在无地面控制点条件下可全自动生成DSM的一体化解决方案,且在影像地面分辨率优于 5 cm时,可满足 1∶500测图规范精度要求[6]。何秀庆利用天狼星无人机免像控技术进行地形图测量及精度分析,生产的DLG平面和高程中误差均为 0.15 m,满足 1∶500测图精度要求[7]。这一系列研究均表明,在一定条件下,无人机航测可以满足 1∶500大比例尺测图精度要求。本文重点对影响无人机测图精度的关键因素进行分析,探讨保证测图精度的措施,并结合国产飞马F300无人机航测系统,进行 1∶500比例尺成图试验研究。
2 影响无人机测图精度的关键因素分析
本文从影响无人机测图精度的关键因素进行分析,并探讨提高成图精度的有效措施。
2.1 影像质量
影像质量包括影像清晰度、ISO、影像地面分辨率等参数。影像清晰度越高,地物判读越准确,影像特征点提取和匹配更可靠,空三精度越高。影像清晰度与飞行时天气状况能见度直接相关,要保证高的影像清晰度,应避免雾、霾等天气不佳的情况下飞行。此外,由于无人机处于高速运动中拍照,会带来像点位移,像点位移会降低影像解析能力,影响判读精度[8]。像点位移公式为:
δ=v×t/GSD
其中,δ为像点位移,v为飞机运行速度,t为相机曝光时间,GSD为影像地面分辨率。为了减少像点位移,应缩短曝光时间。规范规定像点位移一般不应大于1个像素,最大不应大于1.5个像素。在大比例尺测图应用中,为了保证影像的高解析度,根据经验,应将像点位移控制在1/3像素[9,10]。目前,市面上的电动固定翼无人机巡航速度一般为 18 m/s左右,假定设计地面分辨率为 5 cm,则为了控制像点位移,应在保证影像曝光足够的情况下,尽量缩短曝光时间,在本例中不超过 1/1080 s,通常设置为 1/1250 s。
ISO应根据飞行时光照情况进行调整,光照条件越好,ISO可设置越低。ISO值越高,影像噪点越多,建议ISO设置为320~600,当光照条件不好时,ISO值设置得过高,影像质量也会差。因此,应选择光照条件好的时候进行航拍,保证影像质量。
影像地面分辨率与航高直接相关,它们之间的关系如下式:
其中,H为航高,f为相机焦距,GSD为影像地面分辨率,μ为CCD像元大小。影像分辨率越高,判读精度就会越高,在影像空三处理和测图中精度越高,但是会降低航摄效率。根据规范要求, 1∶500航测法成图要求航摄地面分辨率优于 8 cm,为了同时兼顾成图精度和航摄效率,根据经验, 1∶500无人机航测成图时,一般设计影像地面分辨率为 4 cm~5 cm。
2.2 飞行姿态
飞行姿态包括飞机航拍作业时的俯仰角、横滚角和航偏角,即航摄影像的外方位角元素[11]。飞行姿态与飞机飞行状态和飞行时风速极大相关。在飞行器自身稳定性较好的情况下,影响最大的就是风。有风时会导致飞机为了抵消风的影响而作出相应的反馈,飞机的姿态就会发生较大变化,尤其是风向多变的情况下,飞机姿态更不稳定,这样容易引起航拍影像拍摄姿态角过大而导致重叠度不够。重叠度不够,影像匹配容易失败,形成航摄漏洞或连接性不够,且拍摄姿态角过大,容易造成影像畸变更大,带来大的模型差。无人机大比例尺航测成图应用中,应选择稳定的飞行平台,风速过大或风向多变的天气情况下,不适宜航拍作业。风速超过三级,非紧急情况尽量不作业。
2.3 地面控制和机上POS
地面像控点布设的好坏对最终空三加密的精度起着至关重要的作用。传统航测布点为区域网布点方案[12],参照规范要求的基线间隔和航线间隔布设平面和高程控制点,像控点布设的密度和均匀性对平差的精度影响重大。GNSS辅助空三的引入可以有效减少像控点的数量且可以大大提高无人机航测的精度。在影像曝光点坐标精度足够高的情况下甚至可以免像控[13]。随着卫星导航定位技术的发展,定位设备可以做得足够轻巧且精度高,可以与无人机进行很好地结合。目前无人机装配的差分系统一般包括地面基准站和机上流动站两部分,差分解算的方式主要包括RTK实时差分解算和PPK后差分解算。飞马F300无人机航摄系统同时装配了RTK实时差分和PPK后差分系统,二者进行融合解算可以使影像曝光点坐标精度达到 5 cm~10 cm。
2.4 畸变模型
目前多数无人机由于体型小、载荷有限,多搭载轻小型非量测普通相机作为影像获取装备,常用于无人机搭载的相机有SONY a7r、SONY黑卡、Nikon D810等,这类非量测相机往往存在相机畸变大、焦距短、像幅小等问题。而对于目前的硬件搭载水平一定的条件下,对测图精度影响很大的就是相机畸变。如果相机畸变不能有效去除,会直接导致空三无法满足精度要求、立体像对模型差大、接边工作量增大,也难以满足 1∶500比例尺测图的需要。因此如何准确地模拟相机畸变信息是解决无人机高精度立体测图的一个关键因素。
像片中心畸变小,边缘畸变大,常见的多项式畸变模型由k1、k2、k3、p1、p2、α和β组成[14],模拟相机的径向畸变、切向畸变和像素的非正方形比例因子,满足相对规则的相机畸变去除;但多数非量测相机畸变不规则。针对此特点,飞马机器人开发了基于格网畸变的模型算法,能有效减小模型差等问题,提高航测成图精度。
格网畸变的原理是将相机成像CCD元件视作规则格网组成,每400×400像素作为一个格网,逐块格网模拟相机畸变。采用室内亚毫米级高精度三维检校场,对相机进行精密检校,其格网畸变的获取如下:
(1)使用平行光管进行相机对焦,保证镜头无穷远对焦的准确性。
(2)多片联合检校。在检校场不同位置进行影像的拍摄,并通过多片联合检校解算出准确的格网畸变参数,既保证检校精度,又有效地避免了过拟合。格网畸变可准确量化不规则相机的畸变信息,从而实现高精度数据成图。飞马机器人公司对该畸变模型进行了充分的精度对比测试,表明该畸变模型精度明显优于传统畸变处理结果,且其精度可提高一倍,有效地解决了非量测性相机畸变不规则无法应用于高精度航测成图的问题。室内检校场和格网畸变模型示意如图1、图2所示。
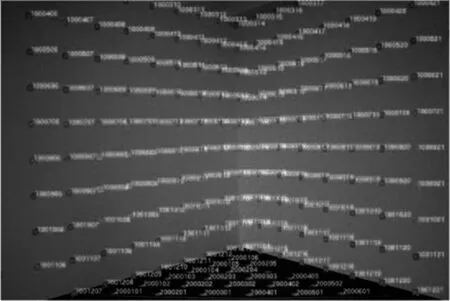
图1 室内三维检校场
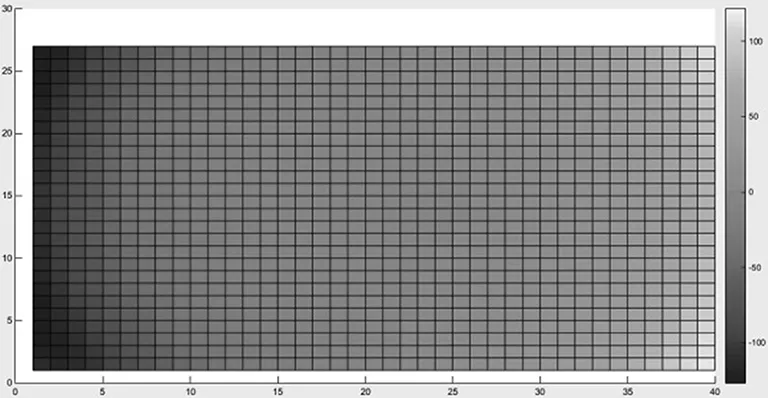
图2 格网畸变模型示意图
3 无人机1∶500比例尺测图试验
3.1 飞行平台和搭载传感器
本研究中所用飞行平台为飞马F300电动固定翼无人航摄系统,机身采用超轻泡沫材料,采用手抛起飞和伞降的起降方式。无人机配备了RTK实时差分和PPK后差分系统,支持GPS和北斗卫星导航数据,机上接收机采样频率高达 50 Hz,保证了很高的数据解算精度。飞行平台主要性能参数如表1所示。

飞马F300航摄系统主要性能参数 表1
本航摄系统搭载的航测模块为SONY DSC-RX1R Ⅱ相机,相机出厂前由厂家进行格网畸变模型检校提供使用。
3.2 测区概况
本研究中选取三个不同地形区域进行试验,三个测区概况如表2所示。
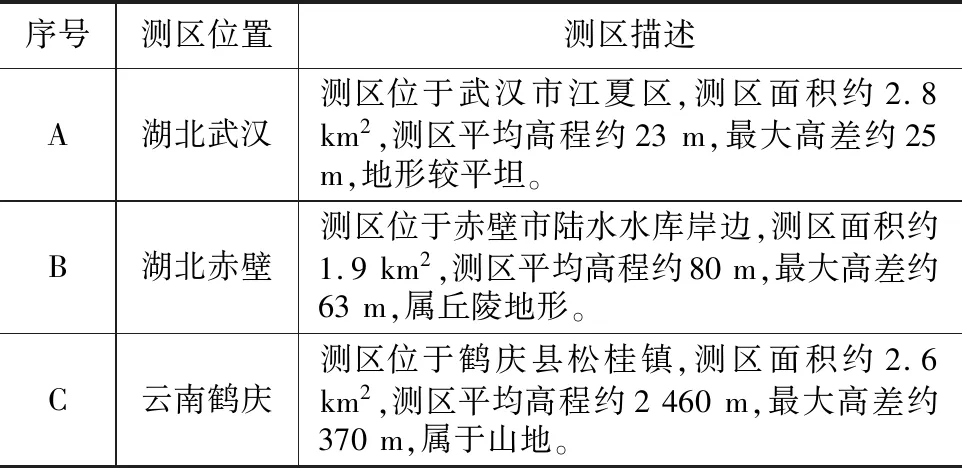
测区概况 表2
3.3 航空摄影数据获取
根据三个测区地形情况设计航线,A和B测区一个架次飞行,C测区由于高差较大,根据实际地形情况,划分为两个架次变高飞行,两架次航高相差 190 m,保证测区足够重叠。在能见度高、光照条件好、风速低于三级的天气情况下获取航拍影像。影像清晰、反差适中,无明显噪点。获取影像情况如表3所示,从表中可知,影像航向重叠度和旁向重叠度均大于65%和40%的要求[15],保证了高的重叠度,C测区属于山区地形,落差大,航线设计时加大了旁向重叠度,保证强的连接性。影像姿态均较好,俯仰和横滚角超过5°的影像数量较少。

影像获取情况 表3
3.4 影像处理
数据获取后分架次进行整理,首先利用差分解算模块进行PPK/RTK融合解算,获得精确的曝光点坐标,然后基于格网畸变模型对原始影像进行初始畸变纠正,之后在智拼图模块按测区建立工程,进行空三加密解算。A测区地形平坦,且影像分辨率很高,直接进行免像控空三解算。B、C测区采用四个角点布设平高控制点,GNSS辅助空三解算,解算后像控点残差为:B测区平面中误差为 0.05 m,高程中误差为 0.06 m,C测区平面中误差为 0.06 m,高程中误差为 0.08 m,满足《数字航空摄影测量空中三角测量规范》(GBT 23236-2009)中1∶500比例尺空三加密精度要求。
3.5 模型精度检查
空三加密后,将加密成果导出,在数字摄影测量工作站导入,恢复立体模型。采用GNSS RTK实测采集的外业数据,导入模型进行平面位置和高程精度检查。选取的平面检查点主要为提前布设的标志、道路标线、规则人工地物角点等,高程检查点为道路、农田、荒地等裸露区域的高程散点。
为了验证格网模型的精度,本次试验还将传统畸变模型和格网畸变模型的空三成果分别恢复立体进行模型精度检查和模型接边差的比较。三个测区的检查点数量和两种畸变模型下检查精度情况如表4所示。

两种畸变模型下模型精度检查统计 表4
所有检查点在两种空三成果模型上最大接边差均值统计如表5所示。
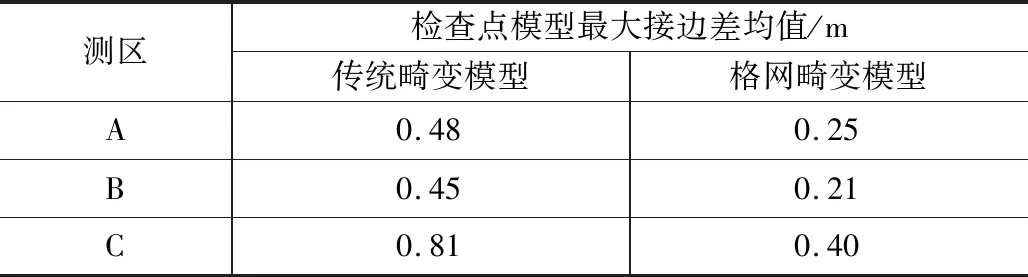
两种畸变模型下检查点最大模型接边差统计 表5
从以上表中可看出,采用格网畸变模型后,模型精度均得到了很大提高,尤其是高程精度,提高了一倍多,且最大模型接边差均缩小了。采用格网畸变后立体模型精度明显优于传统畸变模型结果且三个测区检查点平面和高程中误差均满足《基础地理信息数字成果1∶500 1∶1000 1∶2000数字线划图》(CH/T9008.1-2010)1∶500比例尺DLG成果平面位置中误差和高程中误差要求。
4 结 语
本文对无人机1∶500比例尺测图的关键影响因素进行分析,讨论保证测图精度的措施,并基于飞马F300无人机航摄系统(装配高精度RTK/PPK定位模块),选取三个不同地形试验区,进行1∶500比例尺成图生产试验,结果表明在成像条件好,影像地面分辨率优于5cm,风速小、飞行姿态好,影像重叠度高的情况下,在无控或稀少控制点情况下,GNSS辅助空三可以达到1∶500大比例尺测图精度要求,同时也表明了文中应用的格网模型具有很高的精度,可以有效去除影像畸变,减小模型差。山区由于地形起伏大,高程误差相比平坦地区会增大,但仍满足规范要求。对于山区,可以通过提高重叠度、分区块变高航飞的方式保证成图精度。无人机航摄系统应用于大比例尺测图,相对传统全野外测量方式,可以大大减少外业测量工作量,极大提高工作效率,具有重要实际意义。
猜你喜欢
山东煤炭科技(2022年6期)2022-07-14
河北地质(2021年4期)2021-03-08
中国科学数据(中英文网络版)(2020年4期)2021-01-20
华南地震(2020年3期)2020-10-20
理论与创新(2020年15期)2020-10-09
辽宁省博物馆馆刊(2020年0期)2020-08-13
空间科学学报(2020年6期)2020-07-21
中国铁道科学(2019年5期)2019-10-19
测绘通报(2018年10期)2018-11-02
企业科技与发展(2018年5期)2018-09-10
