双筒直线电动机矢量控制系统
2020-01-13 05:12:42彭培成石军亮张家旗王子文
煤矿机电 2019年6期
彭培成,石军亮,张家旗,王子文
(河南理工大学, 河南 焦作 454000)
0 引言
近年来,矿难经常发生,已经造成了重大的人员伤亡和经济损失。矿难发生后,救援机器人顺利快速进入矿井并将探测到的信息准确及时传达到地面是救援的首要任务。但矿难过后的矿井环境恶劣,存在着一些形状固定与结构化的地形,如道床、斜坡和连续台阶常常会给搜救工作带来困难,在搜救过程需要机器人具有较强的爬坡越障能力,并具有快速的反应能力[1-2]。因此,驱动控制系统的研究成为至关重要的任务。
双筒直线电动机结构轴向对称,内、外定子共用一个动子(次级),不存在横向边端效应,也不存在法向磁拉力,动子和定子间气息均匀,能产生较大的电磁推力,相较于直流电动机和步进电动机在动子进行大推力运动的场合,双筒直线电动机有着明显的优势[3],而且双筒直线电动机具有较好的适应复杂环境能力和高速度、高效率、无打滑现象等优点。
驱动控制系统中,其电动机是动力源。面对复杂的环境,其性能成为了驱动控制系统的关键[4]。鉴于研究双圆筒直线电动机控制系统的文献很少,本文从内、外定子并联共用一个动子的角度出发,建立了双圆筒直线电动机矢量控制系统的数学模型,并进行了在线仿真,仿真结果验证了模型的有效性,为双筒直线电动机控制系统在矿难救援机器人上的进一步研究应用奠定了理论基础。
1 双筒直线电动机数学模型
双筒直线电动机可以看作是将双边扁平型直线电动机沿着和直线运动相垂直的方向卷接成筒型变化而来,其结构如图1所示。

1-外定子铜复合次级;2-铁复合次级;3-内定子铜复合次级;4-内定子轭部;5-外定子轭部;6-外定子线圈;7-外定子铁心;8-内定子线圈;9-内定子铁心。
图1中,D1为内定子轭内径,D3、D4分别为钢次级内、外径。由于双筒直线电动机克服了双边扁平型直线电动机的缺陷,不存在横向边端效应,动子的内、外法向磁拉力相互抵消,故电动机的磁通通过方式如图2所示。

图2 双圆筒电动机的磁通通过方式
由于双筒直线电动机存在着静态、动态纵向边端效应,两者都能使电动机气隙磁场发生畸变[5],故可以选取较多的绕组极对数来减小消除静态纵向边端效应。因此,电动机建模只考虑动态纵向边端效应的影响。
动态纵向边端效应是动子进入定子区域或离开定子区域,在动子导体板上感应出的涡流ie,此涡流会削弱励磁电流且在动子导体板上产生的热量,削弱值iMe及涡流在动子上消耗的功率Pe分别为[6]:

(1)

(2)


(3)
参考异步旋转电动机的磁场定向控制原理,双筒直线电动机磁场定向的基本方程为:
1) 电压方程:

(4)
2) 磁链方程:

(5)
3) 运动方程:
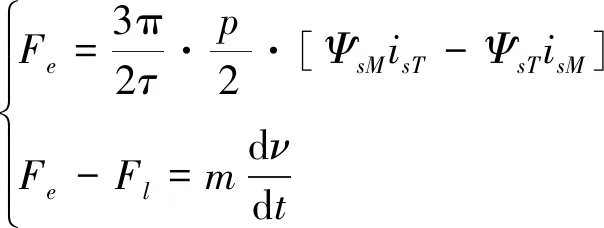
(6)
将式(4)和式(5)用等效电路表示,如图3和图4所示。

图3 M轴等效电路

图4 T轴等效电路
2 磁场定向控制原理
旋转异步电动机磁场定向控制是对转子磁链和电磁转矩进行控制的,而直线电动机磁场定向控制是对动子磁链和电磁推力进行控制的[7]。故由式(4)~(6)可得:

(7)

(8)
由式(8)可以看出:电磁推力Fe与转矩电流并不是线性关系。

(9)

(10)
3 双筒直线电动机矢量控制系统的仿真及实验
由数学模型得到双筒直线电动机矢量控制系统,其原理如图5所示。

图5 电动机矢量控制系统原理
根据图5进行在线仿真,并对样机进行了实验。仿真时电动机是空载启动,在运行4 s时加500 N的负载得到仿真曲线,如图6和图7所示。

图6 电动机仿真电磁推力

图7 电动机仿真动子速度
由图7可知,电动机的动子速度由前期增长逐渐变得平稳,在4s左右颇有降低。由样机的实验采样数据得到电磁推力图形和电动机动子速度图形,见图8和图9。

图8 电动机实验电磁推力
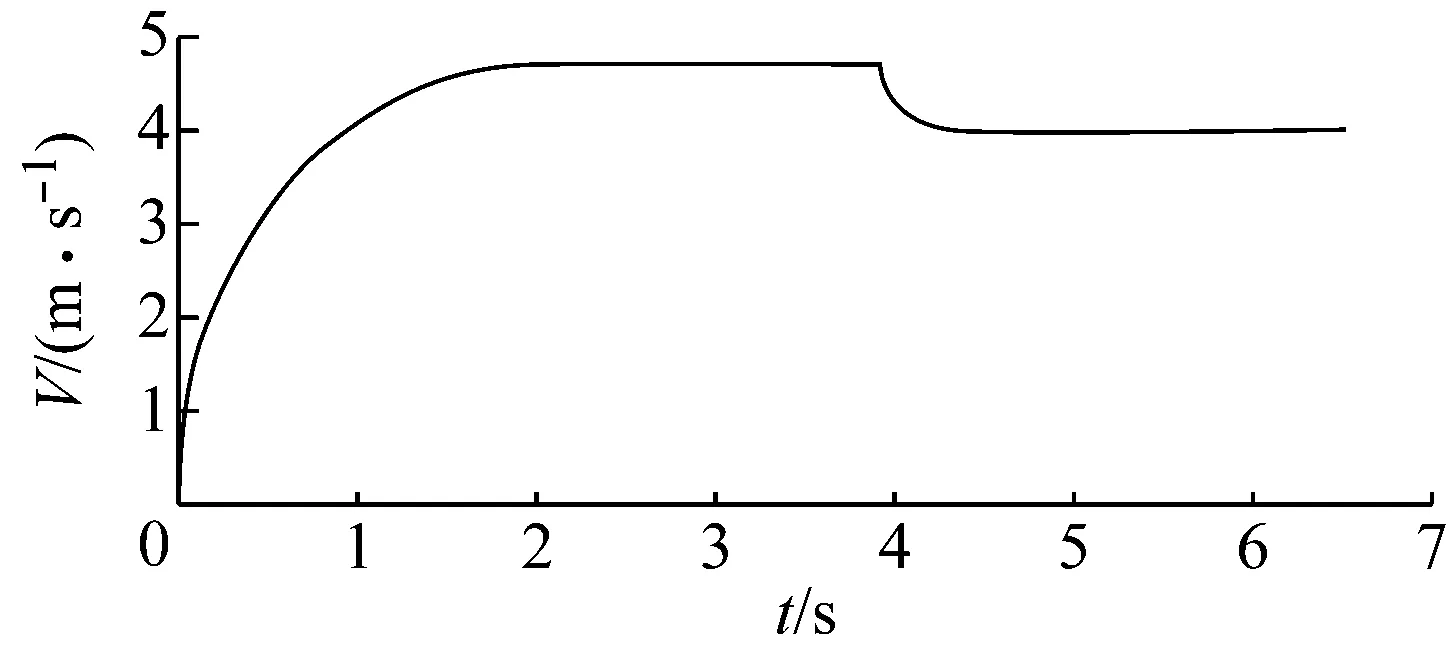
图9 电动机实验动子速度
由仿真图形可以看出,仿真曲线和实验结果基本吻合,从而验证了所建立的双筒直线电动机矢量控制系统模型的真确性。
4 结论
考虑到双筒直线电动机的纵向边端效应,建立了电动机磁场定向的矢量控制系统模型。
根据建立的数学模型,对电动机的矢量控制系统进行了在线仿真,通过图形比拟,验证了模型的有效性,也为双筒直线电动机控制系统,在矿难救援机器人上的进一步研究应用奠定了理论基础。
猜你喜欢
疯狂英语·新读写(2022年1期)2022-01-28 05:30:36
微特电机(2020年7期)2020-07-28 02:29:14
机械制造(2015年10期)2015-11-24 12:03:24
天文爱好者(2015年12期)2015-08-23 11:54:24
电源技术(2015年9期)2015-06-05 09:36:06
读者(2012年24期)2012-09-22 20:27:46
振动与冲击(2012年20期)2012-09-15 10:23:30
科学之友(2011年2期)2011-01-23 09:25:08
新民周刊(2010年50期)2010-05-30 10:48:04
杂文选刊(2010年9期)2010-05-14 13:37:51