基于非分光红外法的汽车尾气检测装置的设计
2020-01-11 02:19:34简家文
车辆与动力技术 2019年4期
李 辉, 张 鑫, 简家文
(宁波大学 信息科学与工程学院,宁波315211)
汽车尾气中含有数百种化合物,多数对人体有害.其中,对人危害最大、含量最多的有CO2、CO、HC化合物、NOx及固体悬浮颗粒物[1].因此,设计汽车尾气传感器、检测汽车尾气浓度以及减少有害物质的排放成为了环境保护中的重要环节.目前,常用的气体浓度检测方法主要有电化学检测法、催化燃烧法和红外检测法.红外检测法基于红外吸收定律,根据物理特性的不同,可以分为分光型和非分光型.早在2005年,国家出台《点燃式发动机汽车排气污染物排放限值及测量方法(双怠速法及简易工况法)》,其中,明确规定对一氧化碳、二氧化碳、碳氢化合物等气体浓度的测量采用非分光红外法[2].
随着电调制红外光源的研制和红外探测器的发展,非分光红外法因具备快速、准确的优点在气体分析方面得到普遍应用.王学水等[3]介绍了一种非分光红外CO2浓度测量仪,详细阐述了系统设计和核心硬件的实现过程,并且根据实验所得数据改进了浓度计算方法;陈红岩等[4]根据非分光红外法的检测原理,实现了汽车尾气中CO、CO2、HC化合物浓度的同时测量,传感器的相对误差在±3%以内;刘文贞等[5]提出了采用神经网络模型对传感器阵列信号进行回归分析,模型的仿真绝对误差在5 %以内.
针对国内汽车尾气检测装置分析组分单一、检测精度不高、测量模型复杂等缺陷[6],文中基于非分光红外法基本原理,提出了一种新型汽车尾气检测装置的设计方案,主要出发点为:①构建传感器测量模型,实现汽车尾气中3种主要污染气体CO2、CO和HC化合物浓度信息的同时检测;②简化光源驱动、信号处理等模块的硬件设计,提高检测装置的测量精度;③通过引入自适应支持向量机优化算法,来提高系统的精确度和稳定性.
1 非分光红外法检测原理及测量模型
1.1 红外检测原理
光源发出连续波长的红外光,经光学气室透过待测气体时,气体会吸收对应波段的红外光,从而造成入射光强的能量衰减.出射光强和入射光强之间的相互关系服从Lambert-Beer定律[7]:
I(λ)=I0(λ)e-kcL.
(1)
式中:I是出射光强;I0是入射光强;k是待测气体的吸收系数;c是待测气体浓度;L是气体吸收的光程.通过检测入射光强I0(λ)和出射光强I(λ)就可以得到待测气体的浓度c.
由于受到外部环境光的干扰,实际测量探测器接收的光强难度较大,选择的探测器TPS4339有4个光路通道,检测通道滤光片G1.2、G2.2、G5.1的中心波长分别为4.66 μm(CO气体吸收峰值为4.65 μm)、4.43 μm(CO2气体吸收峰值为4.25 μm)、3.46 μm(HC气体吸收峰值为3.39 μm),参考通道滤光片G20.3的中心波长为3.93 μm,如图1所示.
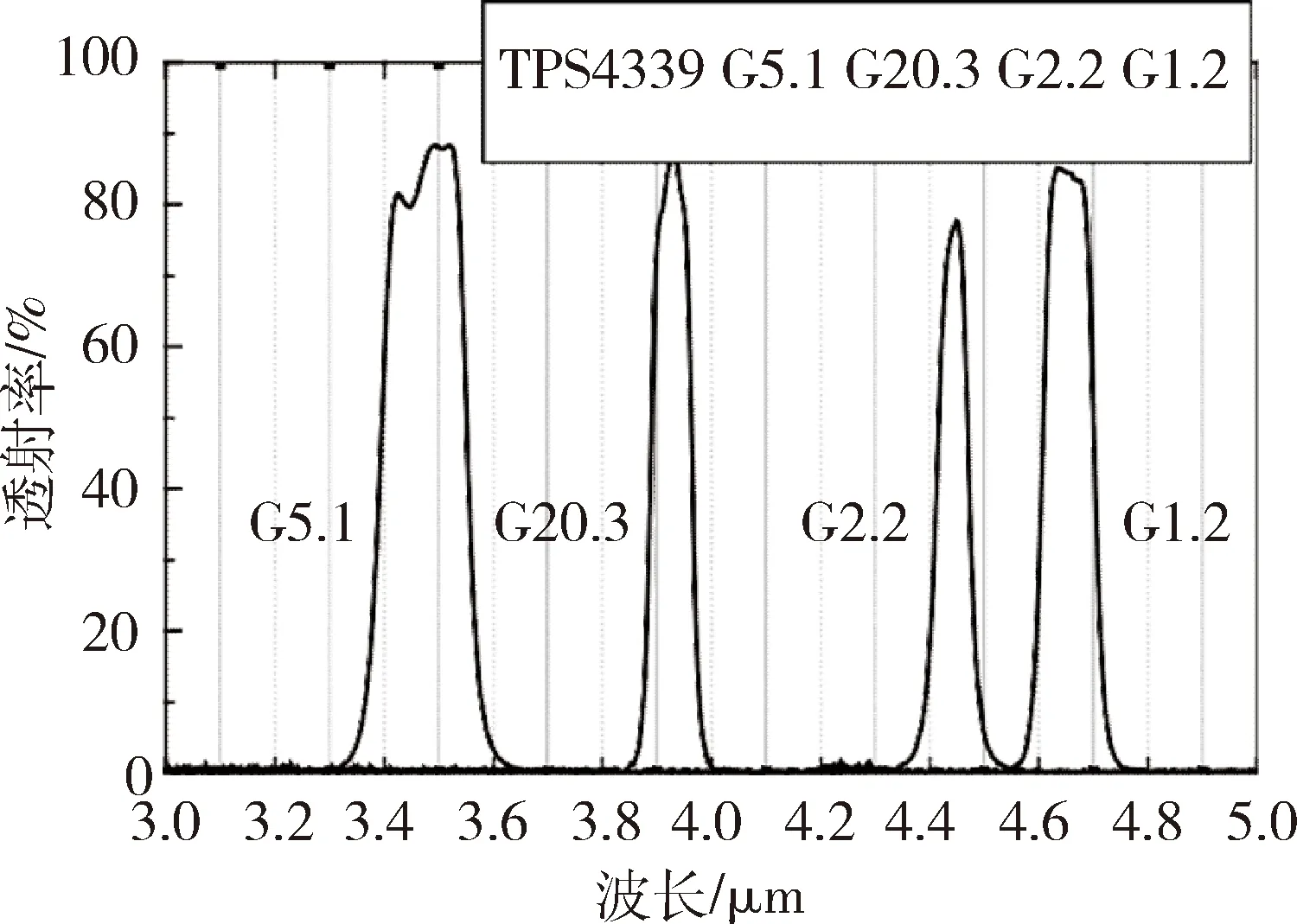
图1 红外探测器TPS4339滤光片组的中心波长分布
根据探测器的输出电压和红外光强成正比,可以得到:
(2)
式中:U0为参考通道的输出电压;U为检测通道的输出电压.
结合式(1),可得
(3)
通过变换可以求得待测气体浓度为
(4)
1.2 传感器测量模型
基于非分光红外法尾气检测装置主要由光源、气室、红外测探器等光路部分和相应的电路部分构成[8],传感器测量模型示意图如图2所示.当系统工作时,STM32单片机产生一定频率的方波驱动信号控制红外光源IRL715.红外光源发出连续光谱的红外光通过气室,经汽车尾气气体吸收和滤光片过滤后,照射至热电堆探测器TPS4339上.根据照射的红外光的能量大小,探测器输出相应的热电势信号.

图2 传感器测量模型示意图
红外光源的选择,原则上要满足其辐射的光谱范围覆盖CO2、CO、HC三种气体的吸收峰值和参考光路的测量波长.设计采用德国Perkin Elmer公司的热辐射型红外光源IRL715[9].当光源的驱动电流为115 mA时,测量其在不同波长处的透射率,如图3所示.图中垂直线表示所选气体吸收峰值的位置,G编号是PerkinElmer红外滤光片相应的标识符.由图可见,其截止波长大概在5 μm,覆盖了选用滤光片的中心波长,满足系统的使用需求.由于红外探测器对光强变化的敏感特性,所以需对光源IRL715进行电调制.实验表明,当光源供电电压为5V时,工作在高电平占空比为4∶6的调制模式下,系统选择红外光源的调制频率为1/6 Hz,可以最大程度地减少低频漂移和闪烁噪声引起的误差.

图3 IRL715透射率曲线
为了减少红外光的损失,光学气室材料选用玻璃镀金,增加气室的反射性能.同时,结构采用密封的圆筒形设计,只保留待测气体进出的气口.在保证红外光源和探测器安装的前提下,一般气室内径取10~30 mm[10].考虑到热电堆探测器的外径最大处为10.3 mm以及进出气口大小为6 mm,设计气室内径取20 mm、外径取24 mm.气室长度选择的原则是根据检测仪器测量浓度范围,在线性刻度范围内尽量选择最长的气室长度.根据检测的气体种类不同,市面上常见的气室长度大多在7-15 cm之间,设计选取的气室长度为12 cm.
红外探测器采用Perkin Elmer公司生产的TPS4339热电堆探测器[11],它是一种低功耗、4通道的红外传感器.探测室内有4个相互独立的热电堆,以2×2的矩阵形式排列在探测器圆心的四周,这4个独立的热电堆分别拥有独立的红外滤光片,滤光片的中心波长分别为4.66 μm、4.43 μm、3.46 μm、3.93 μm,对应CO、CO2、HC气体吸收峰值和参考滤光片的中心波长[12].图4是探测器TPS4339的频率响应曲线,由图可知,当接收到的信号频率小于1 Hz时,探测器的相对信号输出强度能达到100%.

图4 TPS4339频率响应
2 硬件电路设计
2.1 光源驱动电路
考虑到光源IRL715的工作电流为115 mA,远大于STM32单片机能提供的电流值,所以,需要外加驱动电路.文中设计了MOSFET开关电路,如图5所示,通过STM32单片机产生的PWM波调制信号来控制MOS管的导通和截止,从而实现光源的交替性亮灭.

图5 光源驱动电路
为了保证探测器的正常工作,驱动电路的设计还应满足光源驱动电路和探测器信号的隔离.红外光源的调制信号为5 V的方波,频率为1/6 Hz,占空比为66.7%.实验表明,因为调制信号需要为光源提供涌流,所以,驱动信号的最小值为920 mV,并不为零.
2.2 信号处理电路
由于探测器输出的电势信号很微弱,只有几十毫伏,所以,需要对探测器接收到的热电势信号进行放大、滤波处理以放大有效信号并抑制噪声干扰.文中采用具有零漂移、低噪声和高共模抑制比特性的双路高精密度放大器AD8552作为前置放大器组成前置放大电路.由于探测器输出四路信号大小比较接近,设计的信号调理电路结构相同.图6为CO通道的信号放大电路的电路图.
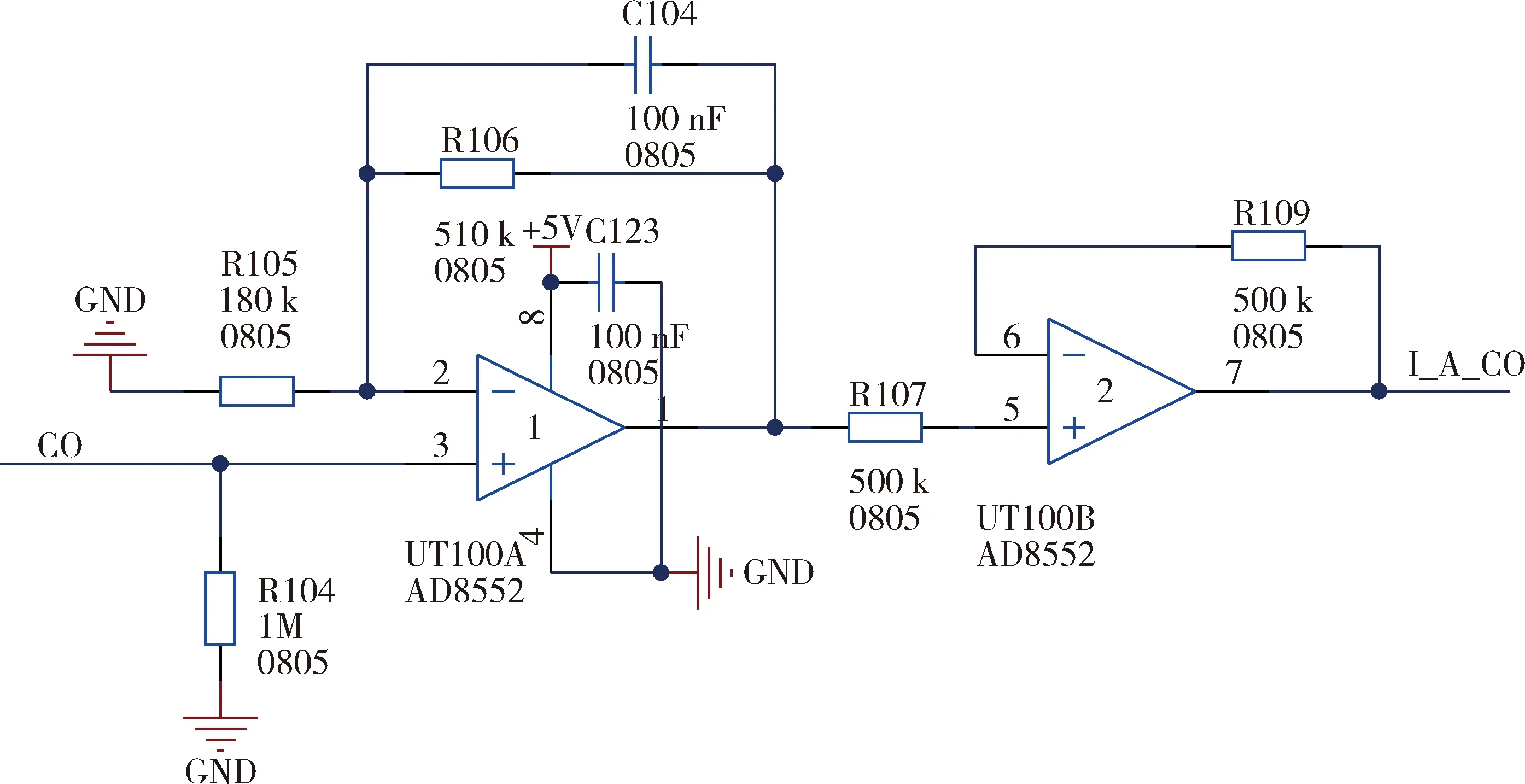
图6 信号处理电路

经过放大和滤波后,使得电压信号的输出范围稳定在0-5 V之间,再经过A/D转换后,将数据将发送至单片机,单片机分析数据并结合温度进行自动补偿,由此便可得到尾气的浓度信息.单片机再将此信息通过串口发送至PC机,再由PC机对测得的数据进行存储和进一步的处理,从而完成尾气浓度的检测.
3 软件及算法设计
3.1 单片机程序设计
单片机程序控制着整个系统的工作流程,主要实现的工作包括系统初始化、信号采集和串口通信.单片机软件流程图如图7所示,当程序开始执行时,首先初始化系统的硬件配置以及相应的外围设备,接下来系统会经过5分钟的预热,主要使红外光源的能量输出以及探测器输出信号达到稳定.预热结束后,单片机接收并读取相应的指令,生成对应频率的红外光源驱动信号,控制A/D芯片完成信号的采集,对采集到的数据进行数字滤波和数据处理,通过串口发送数据,完成对气体浓度的测量.

图7 单片机软件流程图
3.2 PSO-SVM算法设计
试验以设计的汽车尾气检测装置对含CO2、CO和C3H8三种组分的混合气体进行定量分析.在支持向量机算法(Support Vector Machines, SVM)的基础上引入粒子群优化算法(Particle Swarm Optimization, PSO)对试验数据进行建模修正,模型的输入因子包括测量电压、参考电压以及两者的对数比值,输出因子为汽车尾气的浓度值,建立的模型如图8所示.
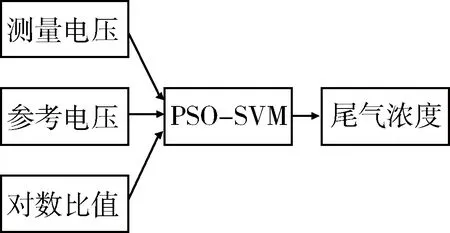
图8 基于PSO-SVM的传感器建模
通过试验标定选择18组样本作为训练数据,建立SVM模型并将训练数据输入到模型中,对模型中的核函数以及参数进行合理的优化选择,利用传感器模型求得对应的尾气浓度值.
4 试验与结果
4.1 试验装置
试验装置的实物图如图9所示,主要包括红外光源IRL715、红外探测器TPS4339和玻璃镀金气室构成的传感器系统部分以及以STM32单片机作为控制单元的前端信号处理电路构成的嵌入式平台.

图9 汽车尾气检测装置实物图
4.2 气体标定试验


表1 CO2气体测量结果
将测量结果代入PSO-SVM模型进行非线性拟合,结果如图10、11所示.

图10 CO2气体的PSO-SVM拟合曲线
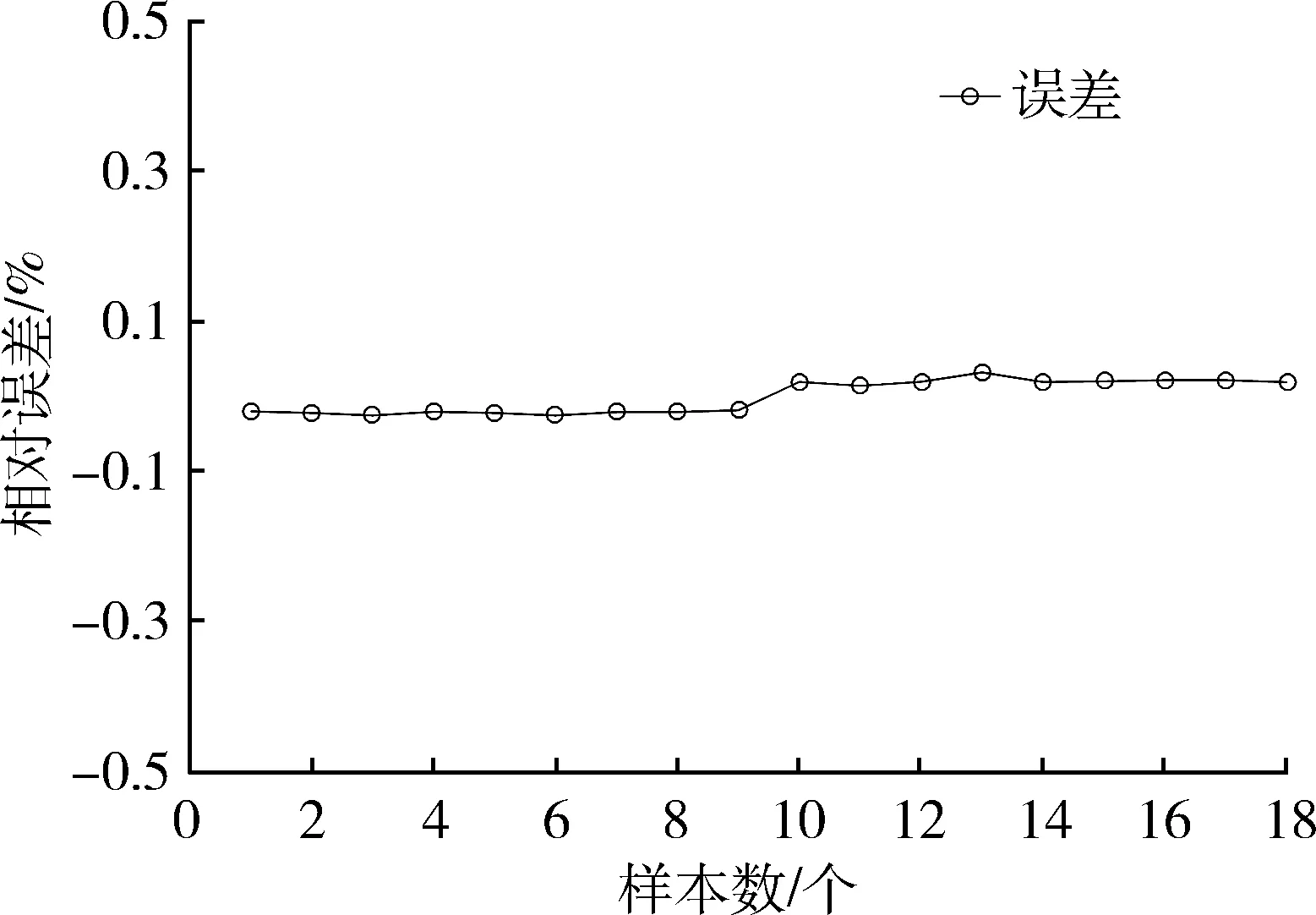
图11 CO2气体的PSO-SVM拟合误差
由图10、11可以看出,利用训练数据建立的模型对CO2进行浓度预测时,模型预测值和CO2实际浓度值可以很好地吻合,在0~20.1%的量程内,相对测量误差的绝对值小于1%,说明模型精度较高,可应用于混合气体中CO2气体的回归预测.
同样地,可以得到经过PSO-SVM优化算法建立的CO、HC气体模型,模型预测值和气体实际浓度值拟合曲线如图12、13所示.3种气体的模型测试数据仿真结果如表2所示.
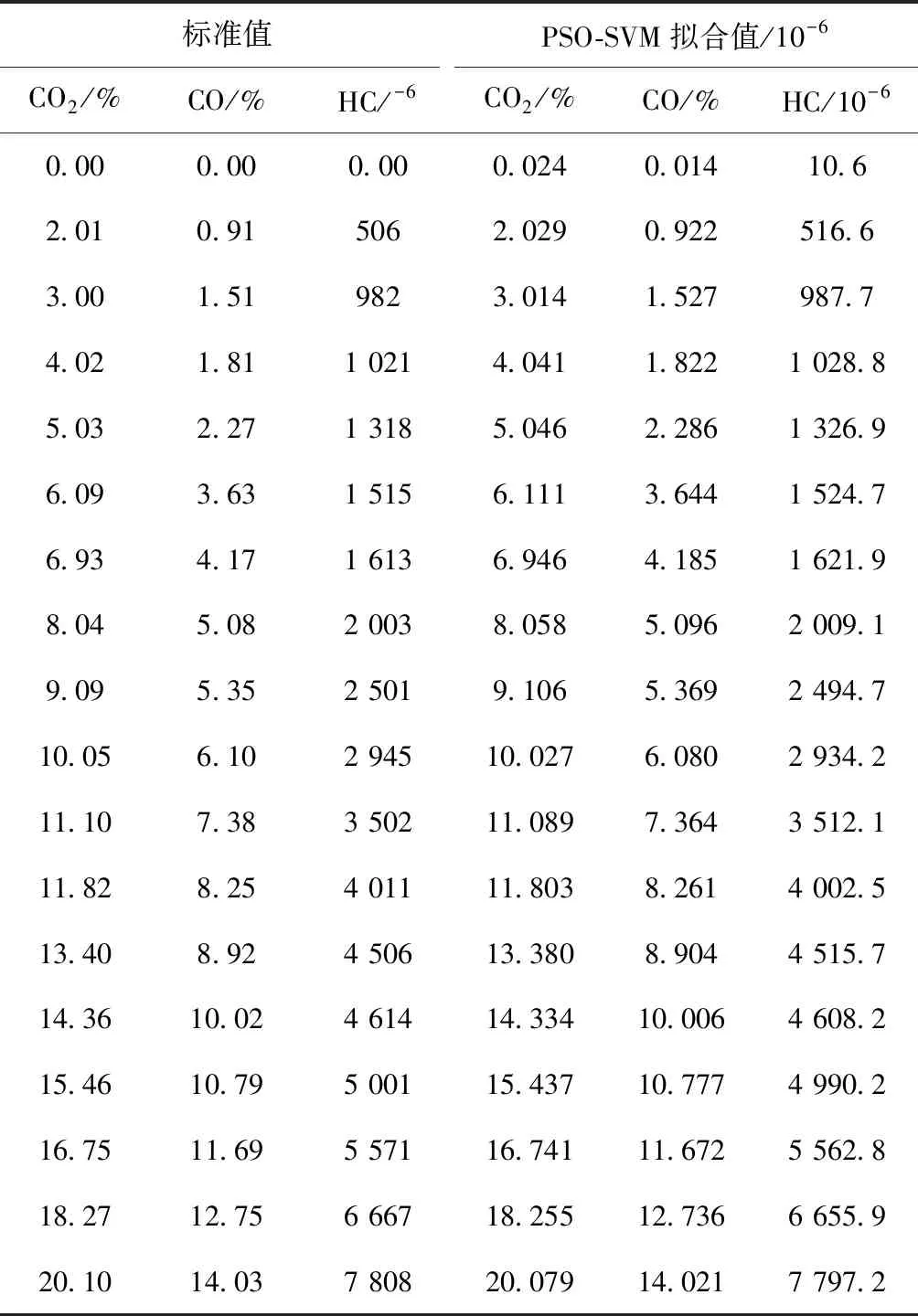
表2 PSO-SVM仿真结果对比表

图12 CO气体的PSO-SVM拟合曲线

图13 HC气体的PSO-SVM拟合曲线
4.3 系统精度试验
为了测试检测装置实际测量的精度,根据气体标定试验得到的气体浓度和输出电压对数比值的关系,对标定后的传感器通入标准混合气体进行测量,试验测得的气体浓度和标准浓度的结果如表3所示.

表3 标准混合气体的测量结果
相对误差δ按照式(5)计算
(5)
式中:Cm是气体浓度的测量值;Cs是标称值;R是气体测量量程.其中,CO、CO2和HC的测量量程分别为14.03%、20.1%和7 808×10-6.
根据表2的数据,分别计算了CO、CO2和HC气体的相对检测误差.由表可见,检测装置在相同的环境条件下,具备良好的精度,相对误差在±2%以内.
4.4 系统稳定性试验
检测装置的稳定性试验主要通过以下过程实现,向气室通入浓度5.04%的CO2标准混合气体,连续运行3小时.每30分钟记录测量得到的气体浓度,数据如表4所示.

表4 稳定度实验数据
稳定度δs按照式(6)计算
(6)
式中:Cmax是浓度值中漂移最大的量.计算可得稳定度δs=0.35%,表明系统的稳定度满足基本要求.
5 结 论
根据CO2、CO以及HC气体在不同红外波段的吸收特性,采用了宽光谱热辐射光源IRL715和热电堆探测器TPS4339,设计并实现一种基于非分光红外法的汽车尾气检测装置.以STM32为控制电路的核心处理器,完成了光源驱动、信号处理等模块的硬件设计和单片机程序的软件设计,对四通道探测器输出的测量电压和参考电压进行放大和滤波处理后,提取有效的电压信号并换算成对数比值.配备18种不同浓度的气体样本开展气体标定和误差试验,通过引入基于自适应粒子群的支持向量机算法进行建模修正.试验结果表明:该检测装置的相对误差在±1%以内.针对多组分混合气体样品和CO2标准混合气体分别展开系统精度试验和系统稳定性试验,试验测得气体浓度值的相对波动范围在±2%以内,稳定度保持在0.35%,在保持较高的测量精度和稳定性的同时,大大减少了测量误差.
猜你喜欢
红外技术(2022年11期)2022-11-25 06:07:52
中国典型病例大全(2022年7期)2022-04-22 21:54:03
纺织科学研究(2021年1期)2021-03-19 05:18:14
小学科学(2020年1期)2020-02-18 06:26:40
百科探秘·航空航天(2020年12期)2020-01-22 08:57:19
小学科学(2019年12期)2019-01-06 03:38:45
中国资源综合利用(2017年2期)2018-01-22 02:45:06
现代工业经济和信息化(2016年8期)2016-05-17 05:37:33
环境科技(2015年5期)2015-11-08 12:09:10
环境科技(2015年5期)2015-11-08 12:09:08