
未来月球及深空探测中的动力学环境问题
2020-01-02 09:55杨艳静樊世超张俊刚张文兵王辰星
航天器环境工程 2019年6期
杨艳静,樊世超,张俊刚,杨 江,张文兵,王辰星
(北京卫星环境工程研究所,北京100094)
0 引言
近年来随着近地空间探索的成熟和发展,越来越多的空间机构将未来的探测目标瞄向月球以及更远的深空。从全球范围来看,除了目前已经开展深空探测的美国、欧洲、俄罗斯、中国、日本和印度等国家和组织外,韩国、阿联酋、巴西等国也纷纷制定了月球和火星探测计划,未来一段时间内月球和火星探测任务将迎来高峰。
随着深空探测任务复杂度的增加,其面临的环境也更加复杂,需要考虑发射环境、在轨环境和着陆环境等多方面问题。在动力学环境方面,除了需要考虑和近地轨道探测航天器类似的环境剖面外,月球及深空探测中的动力学环境通常具有以下特点:
1)运载工具及产品的尺寸和质量更大,带来更加恶劣的发射环境;
2)月球和行星探测等任务通常涉及着陆、巡视探测和返回等复杂任务规划伴随着全新的环境挑战;
3)未来长期载人任务给人机工程匹配、人工重力环境营造等提出了新的要求。
本文介绍了月球及深空探测主要的动力学环境,对现有月球和深空探测的主要动力学环境试验进行了调研,在此基础上提出了未来月球和深空探测面临的动力学环境模拟的挑战和建议,为未来月球及深空探测航天器环境条件设计和结构设计提供参考。
1 月球及深空探测动力学环境
1.1 发射环境
月球和深空探测航天器在发射期间,和常规航天器一样,需要经历严酷的振动、噪声和冲击环境等;并且通常由于产品尺寸和质量更大,需要采用大型运载火箭发射,例如探月三期任务、载人登月等都拟采用新一代运载火箭。
表1给出了新一代深空探测运载火箭的发射环境条件,表2给出了“嫦娥三号”任务运载火箭的发射环境条件。从表中数据可以看出,新一代深空探测运载火箭的发射环境条件要更加严酷。
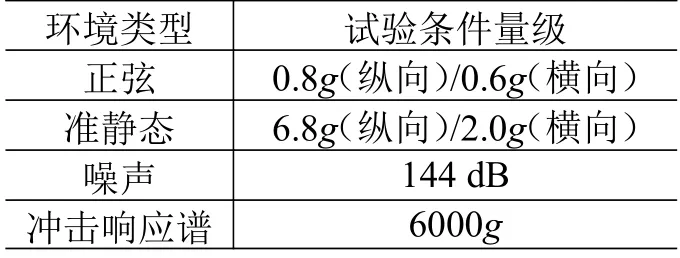
表1 新一代深空探测火箭发射环境条件Table1 Launching environmental condition of deep space launch vehicle

表2 “嫦娥三号”火箭发射环境条件Table 2 Launching environmental condition of CE-3 mission
1.2 着陆环境
探测器着陆性能主要受星球表面环境的影响,也即土壤和表面地形环境[1]。以月球和火星为例,其表面都覆盖有土壤,且不同区域有不同的地形地貌。
根据早期探测的结果,月面区域主要分为月海和高地区域。月海是月面上宽广的平原,约占月面面积的17%。绝大多数的月海分布在月球正面(即朝向地球的一面),尤以北半球的月海分布更加显著。高地是月球表面高出月海的地区,一般高出月球水准面约2~3 km,面积约占月面面积的83%。
月海和高地均覆盖不同尺寸和形状的石块和撞击坑。撞击坑是指布满月球表面的环形凹坑构造,包括环形坑、辐射纹和与撞击坑有关的隆起构造。据统计,月球表面的撞击坑总数在33 000个以上,尤其在月球高地更为密集[2]。尽管有撞击坑,月海区域还是相对平坦,最大坡度约为17°,大部分坡度在0°~10°之间;比较而言,高地部分的起伏更大,最大坡度约为34°,一般为0°~23°[3-4]。
火星除表面覆盖火壤外,表面形貌特征具有多样性特点,有高山、峡谷、坑、盾形火山、河床、平地等,表面严重风化,有各种沙丘。火星表面有大量的火星坑,在南北半球的分布很不均匀:南半球的2/3区域坑化严重,绝大多数大坑集中分布在南半球;而北半球的火星坑较少,其1/3区域的火星坑相对较浅,意味着这些火星坑比较年轻。火星的多坑形貌特征,主要归因于撞击、火山和与水冰活动相关的各个过程相互作用的结果。火星坑不如月球坑那样陡峭,这意味着火星上存在严重的风蚀[5]。
1.3 巡视探测环境
1)重力
月球车或火星车在不同的星表巡视探测时,其受到的重力环境与地球环境不同,例如月球重力加速度约为地球的1/6,而火星上的重力加速度为地球上的3/8。
2)月壤/火壤
月壤是由陨石和微陨石撞击、宇宙射线和太阳风等持续轰击以及大幅度昼夜温差变化引起岩石热胀冷缩破碎而形成的散体材料。根据Carrier 等的研究[6],大部分月壤样品主要由1 mm 以下的颗粒组成,典型月壤的中值粒径在40~130μm 之间,平均中值粒径为70μm。典型月壤的粒径级配如图1所示。
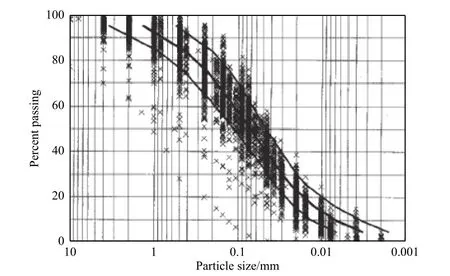
图1 月壤颗粒级配曲线Fig.1 Lunar soil particlesize distributions
巡视器移动性能除了受地形地貌影响外,还会受到土壤机械性质的影响。
根据前期月球探测成果,表层月壤的力学性质如表3所示[7]。

表3 表层月壤的力学性质Table3 Mechanical propertiesof lunar soil
火星表面也覆盖有一层由风化作用产生的碎裂物形成的风化层,也即火壤。“海盗号”任务获得的火壤主要物理力学特性见表4[8]。

表4 “海盗号”任务获得的火壤的力学性质Table 4 Mechanical properties of Martian regolith by Viking and pathfinder mission
3)月尘/火星尘
月尘是月球土壤中的细小成分,一般将粒径小于1 mm 的月壤颗粒称为月尘。月尘是月球形成过程中陨石体反复撞击而产生的未黏结的颗粒物质,主要由晶质颗粒与较大的火成岩碎块、剥离质碎片及微粒金属颗粒组成。月尘散布于月球表面的各个角落,在微流星、静电悬浮、人类活动等因素下四散飞扬,可对航天员和航天器产生巨大危害。根据“阿波罗”计划总结报告,月球尘埃曾给探月任务的实施造成诸多麻烦[9]。
火星大气中含有明显的尘埃,由于火星表面气压较低,因此浮尘很容易在太阳的照射下加速运动并形成尘暴。尘暴中的颗粒具有很强的侵入性,这种侵入性取决于颗粒的大小、硬度和形状。尘暴中的颗粒碰撞摩擦会产生静电放电现象,这种放电会对火星探测器元器件造成损伤并降低其使用性能。此外,当这些尘埃沉降在航天器太阳电池和光学敏感器等表面时,将直接影响到能源系统的效率和寿命,以及光学敏感器的光学特性和图像质量。例如,据“火星探路者”(Mars Pathfinder)探测器实时实地观测结果的报道,火星尘作用下,该航天器的太阳电池能源系统的输出功率出现了下降[10]。
1.4 起飞环境
探测器在地外天体起飞时,发动机气浪会吹起天体表面的尘土颗粒,造成大范围的影响,如造成探测器表面损伤等。此外发动机喷出的高温高速羽流会对探测器产生力热效应,扰动起飞姿态,影响起飞的精度。尤其是在月面环境下,真空羽流的迅速膨胀特性还可能在喷管内部产生激波,影响喷管的工作性能,从而影响探测器的稳定起飞[11]。
1.5 再入返回环境
与低轨道返回航天器相比,月球和深空探测飞行器再入地球大气层时具有更大的飞行速度。飞行器以高超声速进入地球大气层,将承受较大的过载压力和热流压力,这会给飞行器结构和热防护带来严峻的考验[12]。
1.6 大型柔性体在轨动力学
由于任务复杂,月球和深空探测航天器通常由多舱段构成,结构非线性特征明显,系统建模难度大,低频模态密集,内部驱动控制力矩极易引起结构振动,因此需要开展大型柔性体在轨动力学特性仿真分析与地面试验验证技术研究。
2 现有月球和深空探测的主要动力学环境试验
2.1 振动环境试验
根据月球和深空探测器力学环境分析和调研,探测器需要进行的振动试验一般包括:
1)初样阶段:整器鉴定级正弦振动试验;单机鉴定级随机振动和正弦振动试验。
2)正样阶段:整器验收级正弦振动试验;单机验收级随机振动和正弦振动试验。
也有一些探测器会进行整器级的随机振动试验,以“勘测者”(Surveyor)探测器为例[13],其整器振动试验包含低频的正弦振动试验(5~100 Hz)和高频的正弦随机结合振动试验(100~1500 Hz),验收级振动试验条件如图2所示。
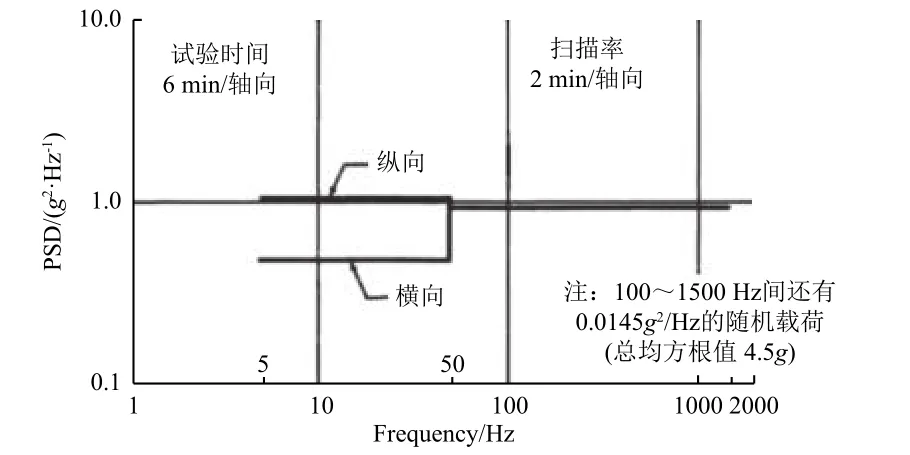
图2 “勘测者”探测器验收级正弦振动和随机振动试验条件Fig.2 Sinusoidal and random vibration acceptance test levels of Surveyor
2.2 噪声环境试验
除了振动试验外,在初样和正样阶段,探测器一般还需要进行噪声试验。噪声试验主要是模拟运载火箭起飞和动力段产生的力学环境,试验在混响室内进行,试验条件主要由运载提供。以“嫦娥三号”结构器为例,其噪声试验条件如表5所示。

表 5“嫦娥三号”探测器系统结构器噪声试验条件Table 5 Acoustic test levels of the structural model of Chang’e-3 lunar lander
2.3 分离冲击试验
分离冲击通常采用真实火工品起爆,测量和分析分离面及探测器关键部位的冲击响应数据,研究分离冲击引起的结构响应。试验目的主要包括:
1)考核各设备在器箭分离、舱段分离引起的航天器结构响应环境下的适应能力,确定探测器分离冲击力学环境;
2)验证分离机构经受力学环境并能正常工作的能力;
3)验证分离过程设计的正确性及机电分离的协调性。
月球和深空探测飞行器因任务复杂度的增加,和其他航天器相比,除了星箭分离、舱段分离、太阳电池阵展开引起的分离冲击外,通常还涉及其他探测机构的解锁展开,火工品数量通常更多一些。以Chang’e-3为例,分离冲击试验涉及到的机构有着陆器的太阳电池阵、定向天线、缓冲机构等,以及巡视器的连接机构、转移机构、相机、太阳电池阵、机械臂、雷达等,火工品数量达数十个。火工品数量的增多给抗冲击设计和分离冲击试验验证都提出了更高的需求。
2.4 着陆冲击试验
着陆冲击是月球和深空探测飞行器所面临的特有的飞行环境。着陆冲击环境不同于火工冲击环境——由于着陆缓冲装置的缓冲作用,高频响应衰减,中低频段会存在较大的响应。典型的着陆冲击响应和爆炸冲击响应谱对比如图3所示[14]。

图3 典型的着陆冲击响应和爆炸冲击响应对比Fig.3 Comparison between typical landing impact responses and blast shock responses
由于这种不同,着陆冲击试验一般不在冲击模拟设备上进行,而是在模拟的着陆面上进行。着陆冲击试验在不同的阶段可以采用不同的方式,比如:设计初期可以进行缩比模型试验,在研制阶段应在模拟重力环境中进行1:1 样机试验[15]。图4为一个低成本的火星科学实验室(MSL)的着陆冲击设备示意图,试验时考虑了重力卸载,通过车载数据采集系统对着陆时的力和加速度进行了测量[16]。

图4 “火星科学实验室”着陆冲击试验装置Fig.4 Schematic diagram of the MSL landing test facility
2.5 行走试验
月球和火星表面都覆盖有土壤,行星车在星球表面行走时可能会因沉陷和侧倾引起失效[17-19]。利用地面试验或仿真手段,控制模拟月/火壤的力学性质和行星车姿态,可以在地面对车辆的移动性能进行充分验证,尽最大可能避免任务出现问题;一旦出现故障时可以迅速实现故障重现,通过对此时月球车移动性能的分析,帮助月球车走出困境。已成功发射月球车和火星车的苏联、美国和日本等国都通过地面试验对行星车的动力学特性进行研究。
图5为“嫦娥三号”巡视器的室内试验场。该试验场也是国内最大的巡视器室内试验场,可为星球车提供星表地貌环境模拟,进行低重力环境下的巡视器移动性能试验、导航与控制性能试验、巡视器任务支持试验、自主驶离试验等。

图5 Chang’e-3月面巡视器行走试验Fig.5 Chang’e-3 lunar rover locomotion test
2.6 月尘环境试验
月尘环境试验一般在真空容器中进行,模拟月尘用与真实月尘性质相近的火山灰粉碎经配比获得,通过试验可以对月尘的沉积污染效应、磨损效应、阻塞效应、静电效应以及渗入效应等进行研究。“嫦娥三号”巡视器研制过程中,为了模拟和评估月尘对巡视器车轮的影响,在月尘环境模拟器中采用摩擦磨损试验机进行了车轮轮轴的磨损试验研究[20],图6即为试验所用的月尘环境模拟器和摩擦磨损试验机。

图6 车轮轮轴磨损试验设备Fig.6 Lunar dust environment simulator
3 未来月球和深空探测面临的动力学环境模拟的挑战和建议
3.1 发射环境
月球和深空探测中,随着任务复杂度的增加,航天器也越来越大型化,例如载人空间站和载人登月航天器的重量均达几十吨级。航天器规模的增加,给发射环境的模拟带来了更大的挑战,采用常规试验方法,整器振动试验中的底部欠试验、顶部过试验问题将越来越严重。
为了更真实地模拟实际飞行力学环境,针对未来航天器面临的复杂、高精度以及复合力学环境,需要开展高相似性地面模拟试验新技术研究,提升现有的设备性能,建立先进的复杂力学环境地面模拟试验手段,应对未来航天器研制地面试验验证的发展需求与挑战。
3.2 移动星表探测器活动作业试验
根据我国深空探测任务规划,将持续深入开展月面勘查,建立月球科研站,择机实施载人登月任务。月球科研站将充分利用机器人技术,通过各类机器人交互作业完成月面无人探测任务。为适应月面地形环境,机器人的移动方式也会考虑多种可能性,和现有巡视器相比,任务复杂度将大大增加,需要开展各类移动星表探测器的活动作业试验。未来的载人登月任务将发射载人月球车,其巡视最大速度将超过现有无人月球车速度,工况也更加复杂多变,新的探测任务下,对地面验证试验也提出了新的要求,需要开展载人月球车行走试验技术研究,满足载人月球车快速机动下的地面试验需求。
此外载人月面软着陆和行走过程中发动机燃气羽流喷射到月球表面上,与月壤、月尘相互作用对飞行器形成多种影响:1)对飞行器产生干扰力及力矩,影响着陆缓速下降和上升过程控制稳定性;2)对飞行器表面多径加热,导致大幅升温;3)激起的月尘可能会使导航敏感器的探测信号衰减,甚至导致其无法正常工作;4)飘扬的月尘沉积在设备功能表面,降低材料的透光率或热发射率。考虑到这些影响,需要开展发动机燃气流与月壤相互作用的分析工作:需要解决月球环境发动机燃气流与月壤两相物质的相互作用准确建模、分析的问题,对燃气流的模拟包括连续介质方法或分子动力学方法,对月壤流动过程的模拟包括假设流体方法或离散颗粒模拟方法等。
3.3 月尘/火星尘防护问题
月尘/火星尘无处不在,其黏附性和渗透性都很强,且难以清除。黏附在探测器设备表面的月尘/火星尘会带来一系列问题隐患,影响探测器性能或危害航天员健康,例如:使光学镜头及热控表面性能下降;太阳电池阵功率损失;机械结构卡死;密封机构失效;航天服及活动部件磨损;航天员及摄像装置被污染和遮挡等[21]。
做好月尘/火星尘防护是保证探测任务成功的关键。因此,应当开展月尘/火星尘防护技术研究,研究月尘/火星尘分布规律,分析关键设备在月尘/火星尘作用下的退化模型,探索高效的月尘/火星尘清除方法。
3.4 人工重力
未来的载人月球及深空探测空间飞行中,飞行任务的时间是以年为单位,失重会对航天员产生严重的危害。通过人工重力的实施,不是单独对某个系统进行防护,而是对所有生理系统进行刺激,可以为未来的载人航天和空间定居提供有力的支撑,应当开展的研究包括:长期载人飞行人工重力环境实现方法研究,空间人工重力实现的关键问题和参数研究,空间人工重力样机研制与试验验证技术等。
3.5 小行星附着探测
小行星形态各异,形状不规则,尺寸跨度大并且引力场很弱,自旋状态也与大行星相差较大,这些独特的物理特性使得小行星附近动力学环境异常复杂[22],其表面着陆、取样与大行星有着较大差异。小行星真实质量、引力场、自旋状态及地表参数在着陆之前是未知的,需要开展未知弱引力天体表面附着与固定技术研究,实现弱引力条件下的防冲击、防反弹和防翻倒附着与固定。同样,地表参数不确定情况下弱引力表面的取样过程也更加复杂,需要开展弱引力天体表面取样技术研究,搭建弱引力环境,开展取样验证等。
4 结束语
月球和深空探测面临的动力学环境与常规近地轨道航天器的有较大区别。为提高探测器性能和可靠性,需要对这些动力学问题开展全面的分析和研究。本文对月球及深空探测动力学环境、现有月球和深空探测动力学环境试验及未来月球和深空探测面临的动力学环境模拟的挑战进行了阐述,提出了未来深空探测动力学环境试验相关的发展建议。
猜你喜欢
军事文摘(2022年18期)2022-10-14
空气动力学学报(2022年4期)2022-08-23
小哥白尼(趣味科学)(2022年6期)2022-08-17
国际太空(2022年7期)2022-08-16
北京航空航天大学学报(2022年7期)2022-08-06
黑龙江大学自然科学学报(2022年1期)2022-03-29
国际太空(2022年2期)2022-03-15
航天器工程(2022年1期)2022-02-21
青少年科技博览(中学版)(2021年11期)2021-03-07
北京航空航天大学学报(2020年10期)2020-11-14
