星载海洋激光雷达测深回波分类方法及验证
2020-01-02 07:10徐嘉苏云梁琨
航天器工程 2019年6期
徐嘉 苏云 梁琨
(1 北京空间飞行器总体设计部,北京 100094)(2 北京空间机电研究所,北京 100094)(3 华中科技大学电子信息与通信学院,武汉 430074)
激光雷达具有能量强、方向性好、波长短及分辨率高的特点。星载海洋探测激光雷达可以全天时、高效率地获取海洋垂直剖面数据,能在海洋地形测绘和海洋环境监测,特别是近海岸带和海岛礁附近的浅水区域环境监测中发挥重要作用。因此,发展星载海洋探测激光雷达是未来海洋遥感探测领域的趋势和前沿方向之一。针对星载激光遥感存在作用距离远、信号弱、动态范围大、散射复杂等问题,国内外都在进行机载平台的先期体制和关键技术验证,为未来星载海洋探测激光雷达进行技术储备[1-2]。目前,具有代表性的机载海洋激光探测载荷主要是加拿大的“海岸带测绘和成像激光雷达”(CZMIL)系统[3]、瑞典的“鹰眼”(Hawk Eye)系统[4]、荷兰的“机载激光回波测深”(LADS HD)系统[5]及美国的“机载氖脉冲激光雷达”(AOL)系统[6]。这些系统基本上能实现对海洋0.15~50.00 m深度的测量,其测深精度可达到0.36 m。我国对激光雷达测深技术的研究始于20世纪80年代,进行了相关技术研究和系统研制[7-12]。目前,最新研制的Mapper5000系统[13]已经在南海某些海岛附近海域完成多架次飞行试验,获得南海岛礁的三维地形数据,其最大实测深度为51.00 m,最浅深度为0.25 m,测深精度为0.23 m,为我国星载海洋探测激光雷达发展奠定了良好的技术基础。
由于海水对激光能量的衰减很强,激光雷达接收的水下回波信号的动态范围非常大,在实现对深水微弱信号检测的同时,其海表及浅水回波信号容易造成探测器的饱和。为此,实际激光雷达测深系统中为了扩大探测动态范围,测深回波采用浅水视场和深水视场2个通道(分别简称浅水通道和深水通道)进行分视场同时探测。激光雷达测深系统接收到的回波波形中,基于激光脉冲自身波形特性、海底后向散射特性及海底回波特性的研究发现,测深回波波形具有不同的表现形式,一般分为近岸浅水回波波形、浅水回波波形和深水回波波形。针对不同类型的回波波形,采用不同的信号处理方法求解海底位置。因此,激光雷达测深回波分类主要解决两个关键问题,即如何进行波形分类和根据不同类型波形如何进行相关处理,本文重点针对前者进行研究。目前,国内外研究多集中于激光雷达海陆波形分类方面[14-16],而对海洋测深回波波形的进一步分类研究较少。近些年,随着更加精确高效对海底进行测绘的需求,测深回波波形分类的研究日趋得到重视。文献[17]中提出了一种基于频谱的测深回波波形分类方法,但较为复杂,且在水质参数较好的条件下无法分辨近岸浅水回波波形和极深海底回波波形,存在一定的误判。
在分析激光回波脉冲、水体散射及海底回波时域廓线特征的基础上,本文充分结合浅水通道和深水通道的不同回波特性,以浅水通道回波波形分析为主,以深水通道回波特性为约束条件,通过2个视场回波波形特征的融合实现更加简洁有效的测深波形分类,可为我国星载海洋激光雷达海底探测研究提供技术参考。
1 回波特性分析
当前激光雷达的测量水深一般为0~50 m,随着深度大范围的变化,海底回波的能量变化范围更大,这就对激光雷达测深系统探测器和高速数据采集模块的动态范围有了更严格的要求。双程的激光在海水中会被吸收和散射,其空间分布会被展宽,光斑也会随着深度的增加而变大,能量呈指数衰减。因此,为了降低对器件的要求,多通道机载激光雷达接收系统通常采用同轴视场分光技术,浅水通道采用同心小视场,深水通道则采用外部大的同心环形视场。2个视场对激光水体回波的响应,如图1所示。
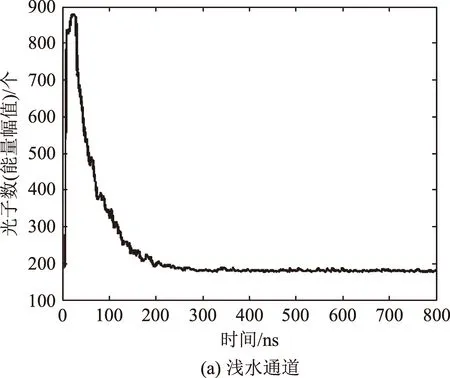
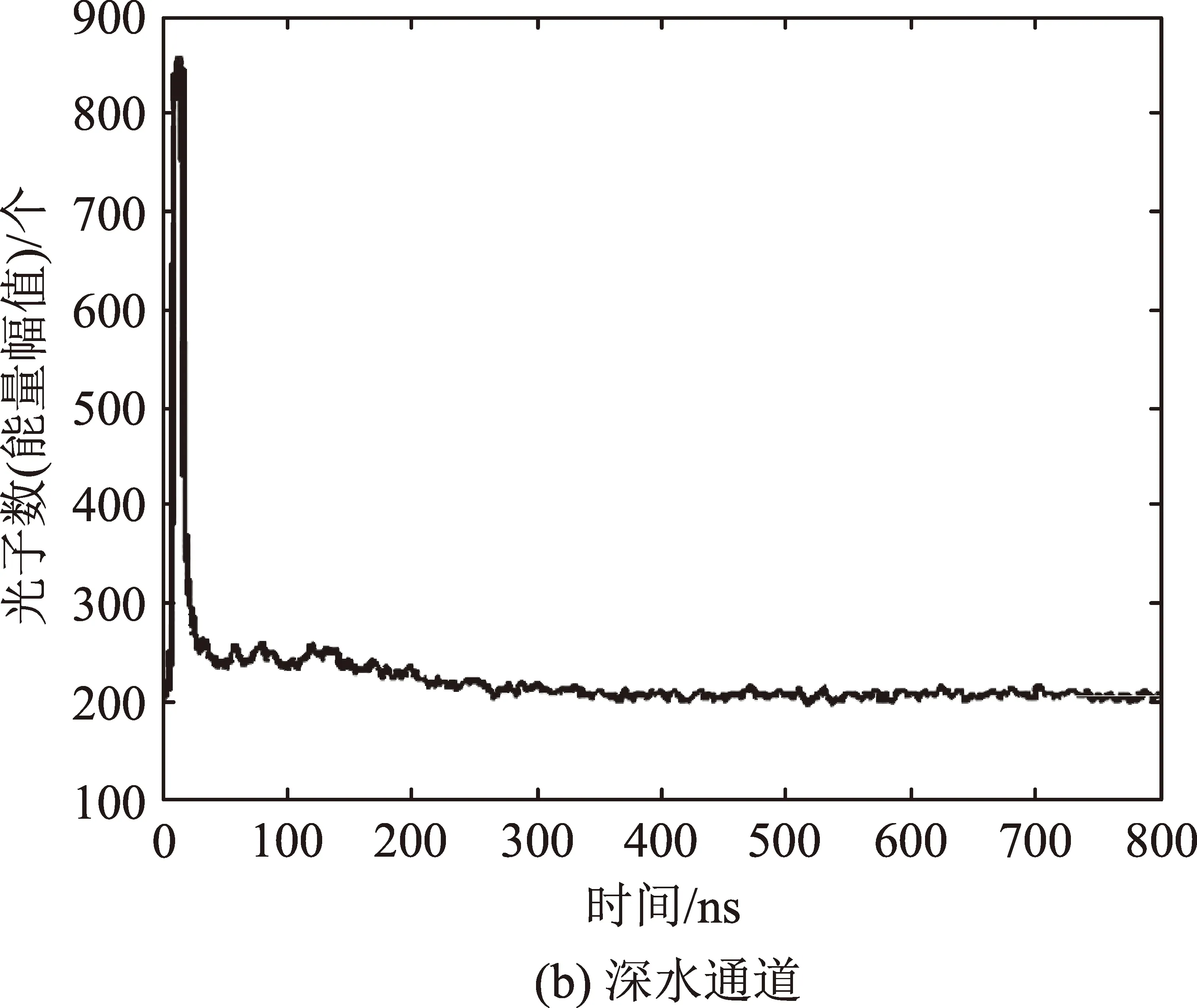
图1 浅水通道和深水通道接收到的水体回波信号
海气界面的强烈海表信号在浅水和深水通道上均会出现响应,小视场浅水通道中不存在视场角的损失,接收到的能量比较稳定。其具体表现为:在海气界面出现响应且能量比较稳定,入水后激光在海水中连续衰减,出现稳定的衰减过程,直至激光到达海底后形成响应。由于视场角的损失,表层水体进入深水通道的效率不高,在水体衰减的共同作用下,浅水回波出现先降后升现象,随着激光在更深的深度上经过多次水体散射,空间分布展宽更为明显,更多的水体散射信号主要被大视场的深水通道接收。
依据大小视场的接收特点和不同深度下的回波信号特征,将海洋测深回波分为近岸浅水、浅水和深水信号3类。其中:近岸浅水(0~2 m)如图2所示。当水域深度小于2 m时,激光在水中的传输时间比较短,则后向散射部分时间比较短。在小视场中,后向散射部分能量变化不是很明显,海表回波和海底回波相距比较近,可能会混叠,因而在小视场中只有一个回波峰值信号(如图2(a)所示),之后迅速衰减。在大视场中,由于视场角的存在,可以检测出后向散射部分能量变化,会出现海表回波和海底回波2个峰(图中叠加在一起,如图2(b)所示)。

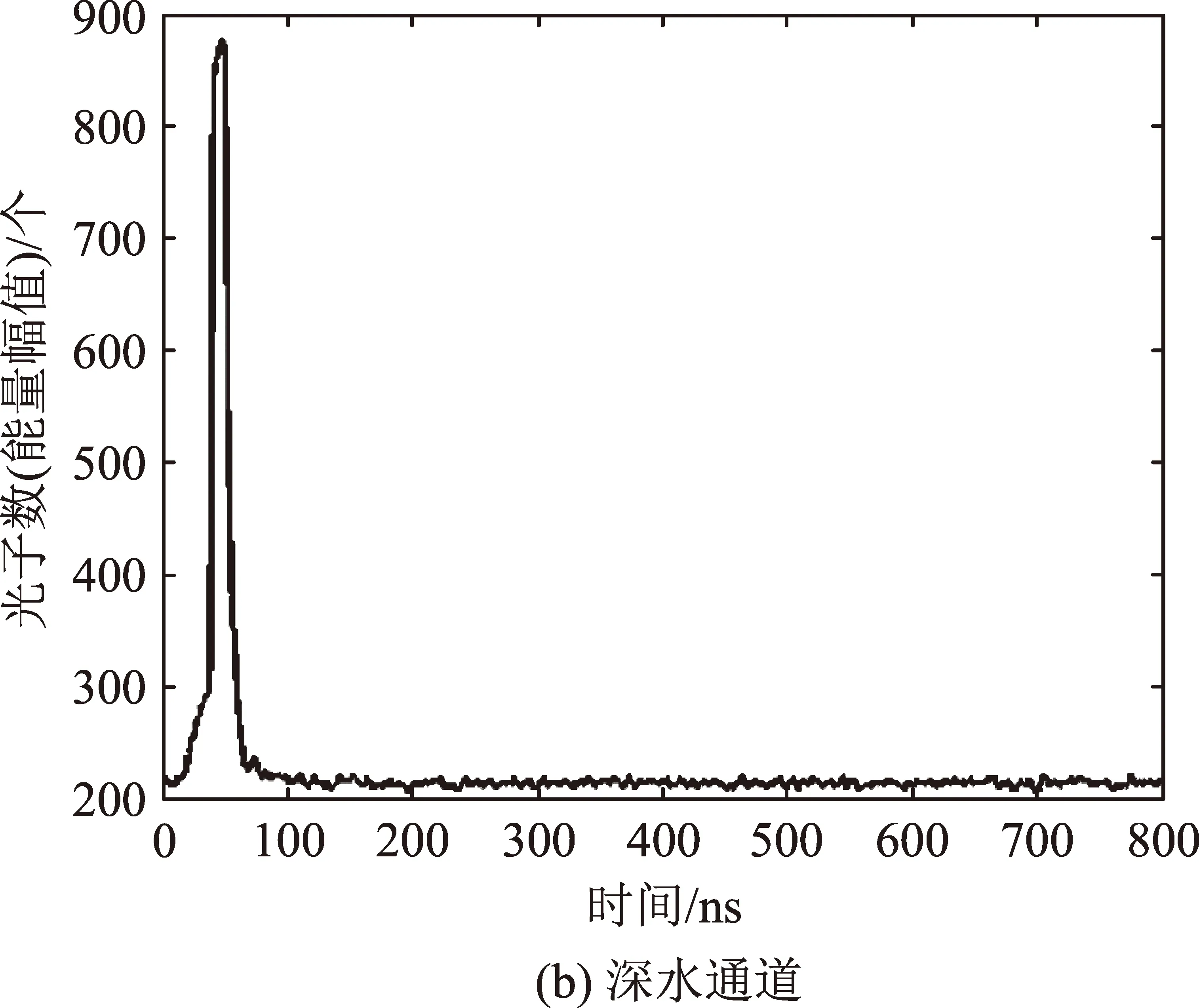
图2 近岸浅水回波信号
浅水信号介于近岸浅水和深水信号之间,主要海水深度为2~20 m,在大小视场中的特征如图3所示。在小视场中回波具有明显的海底回波、后向散射和海表回波3个部分(见图3(a))。其中,海底回波之后的信号不包含水体信息,会迅速衰减,而不再具有指数衰减的性质,因此可以利用这一性质来判断海底回波与有效信号的范围。在大视场中,由于海浪反射角度不同和视场角损失的影响,系统对海表回波的接收效率比较低,会出现海底回波能量高于海表回波能量的现象,海底回波能量较强且比较明显(见图3(b))。
图3 浅水回波信号
深水信号主要是指水深超过20 m的回波信号,信号形式如图4所示。海底和海表回波峰值距离位置较远,也包含海底回波、后向散射和海表回波3个部分。与浅水信号不同,激光在深水中能量衰减严重,海底回波能量较弱,可能混入噪声之中,因此在小视场中出现无明显回波峰值的现象(见图4(a))。在这种情况下,深水信号在小视场中可见稳定的后向散射。而在大视场中,由于接收能量比较强,虽然海浪和视场角损失造成的海表能量比较低,但是回波信号经历先降后升的过程后,后向散射和海底回波依然存在(见图4(b))。如果能量衰减严重,海底回波混入噪声之中,可能存在大视场中也无明显海底回波的情况(见图4(c))。
图4 深水回波信号
以上是对测深回波水体散射及不同类型回波的时域特性分析,接下来将依据这些特性进行具体回波分类方法研究。
2 回波分类方法
基于不同深度下的海洋回波数据特征,本文提出适合星载激光雷达测深回波数据分类方法(流程见图5)。根据测深回波数据在小视场中存在海表回波的特点,确定海表回波的位置,作为海底回波的测定标定参考点。基于激光入水后满足激光在水中的传输定律可知,当激光在水中传输时,在回波上表现为后向散射呈指数衰减,而激光到达海底后其回波中不包含水体散射指数信号,能量迅速衰减。基于这个特性,可区分近岸浅水回波波形和其他波形。近岸浅水由于海表回波和海底回波混叠,在小视场中后向散射部分不存在,可以计算海表回波波峰后的衰减系数加以区分。结合大小视场判断海底回波位置,如果在大小视场中均存在海底回波,则可以判定为浅水信号,否则为深水信号。
图5 方法流程
在小视场中,海表回波能量较强,通过寻找幅值最大值和高斯拟合确定海表回波波峰位置。按照本文分类,近岸浅水信号范围为0~2 m,则对应测深回波波形(幅值-时间)上20 ns(采样频率1 GHz)内会有海底回波出现。相较于激光的脉宽,两峰之间距离较近,会发生混叠现象(见图6(a))。
假设通过处理得到图6中信号数据海表回波峰值位置为Pk(t1,s1)(t代表回波采集点时刻,s代表回波能量幅值),则可以取Pk点后30 ns处的点P2(t2,s2),得到斜率公式为
(1)
这里统一取正数,如果k1大于某一阈值ks=15(正常后向散射部分的衰减系数斜率),则该波形为近岸浅水信号。不过,这样可能会将深水信号归为近岸浅水信号(见图6(b)),当深度超过一定范围,深水信号回波能量衰减剧烈,海表回波波峰及其30 ns后的数据在回波数据上的斜率大于ks,即
(2)
为了解决这一问题,需要加入附加的判别条件,例如利用近岸浅水和浅水在深水通道大视场中的数据特征判断。深水信号的海底回波波峰出现在200 ns之后(对应实际深度20 m),而在200 ns之前,深水大视场中数据满足先降后升的规律;而近岸浅水在100~200 ns范围内(对应实际深度10~20 m)不含有效信号,主要为随机噪声。如图6(c)和图6(d)所示,可以选取大视场中海表回波波峰后100~200 ns的数据,并利用均方差公式(3)和(4)计算。
(3)
(4)
通过分析计算,设定阈值ls=5,如果大视场中均方差l≤ls,则为近岸浅水信号,否则为深水信号或浅水信号。
近岸浅水信号通过小视场的斜率和大视场的均方差计算分离出来,浅水和深水信号的分离还需要进一步处理。相对于深水信号,浅水信号回波较强,因此优先进行处理。其具体方法为:利用上一步中寻找幅值最大值和高斯拟合确定的海表峰值位置,在大视场中相应位置找到海表回波峰值,在此海表峰值点后20~200 ns范围内(对应实际深度2~20 m)寻找最大值点Pmax(t5,s5);然后,在小视场中相应位置找到最大值点Pmax(t5,s5)的横坐标对应点P′max(t′5,s′5)。为了消除噪声等误差产生的时移影响,在小视场中P′max(t′5,s′5)前后20 ns范围内再次寻找最大值点Pfinal(t6,s6)作为小视场中的海底回波信号(见图7(a))。为了消除部分噪声的影响(见图7(b)),用之前的经验选取一个阈值Hs=310。取最大值点Pfinal(t6,s6)两边的最小值点Plmin(tl,sl)和Prmin(tr,sr),代入式(5)计算。
ΔH=max{|s6-sl|,|s6-sr|}
(5)
如果不满足ΔH≥Hs,则该海底回波峰值为噪声,不是浅水信号而是深水信号,否则进行下一步处理。在极大值点Pfinal(t6,s6)后20 ns找到点Pval(t7,s7),运用斜率公式(6)计算浅水回波信号(见图8)。将求得的斜率k3作为海底回波的衰减系数,选取阈值kt=5作为噪声衰减和海底回波衰减的阈值。如果k3≥kt,该信号为浅水信号;否则为深水信号。
(6)
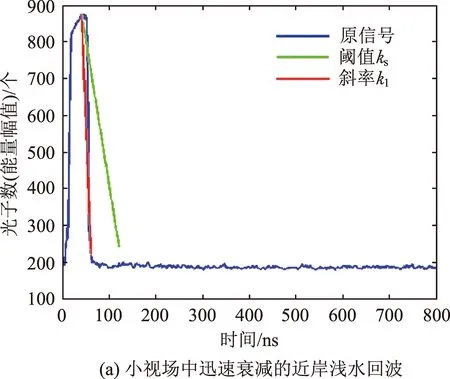
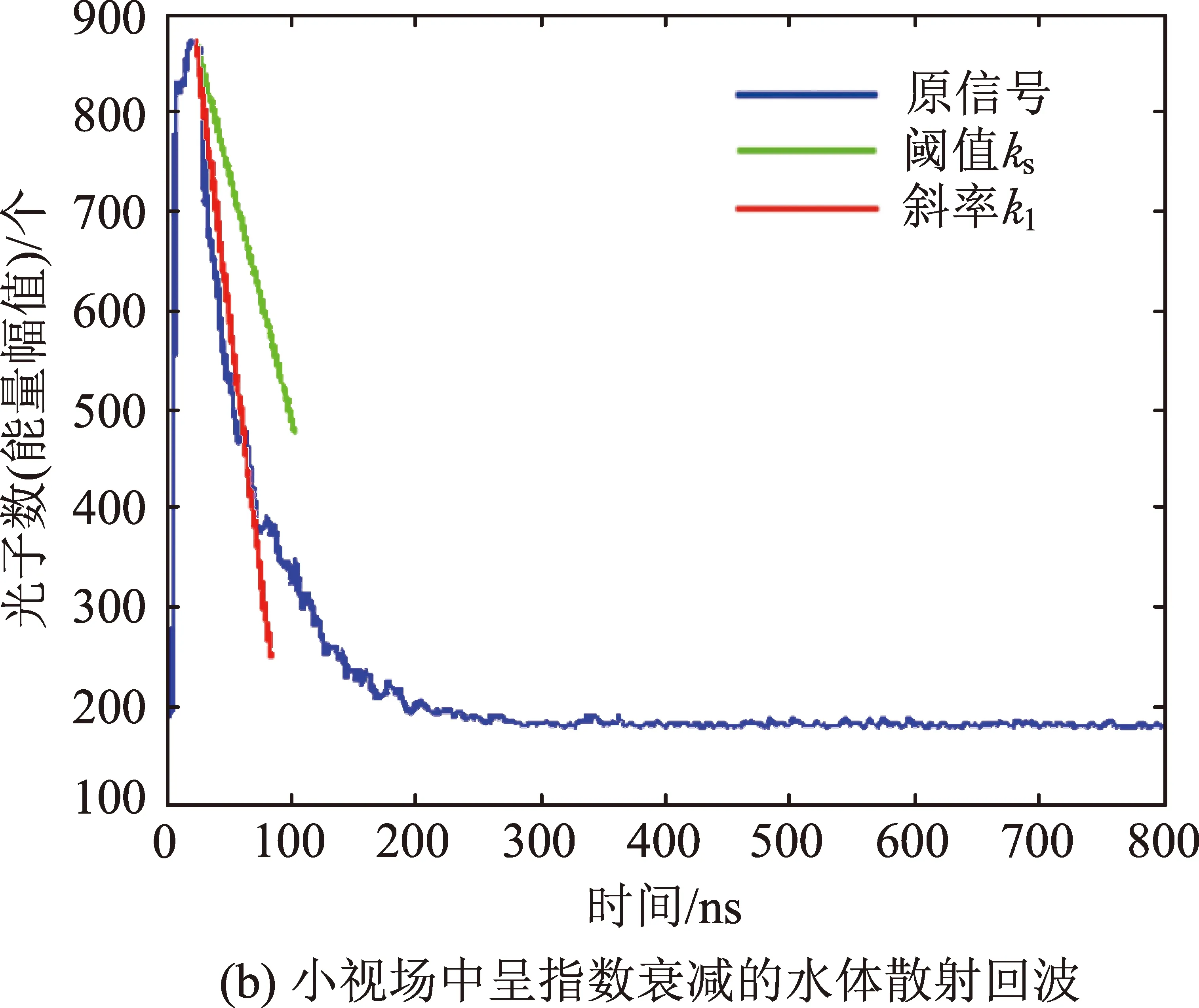

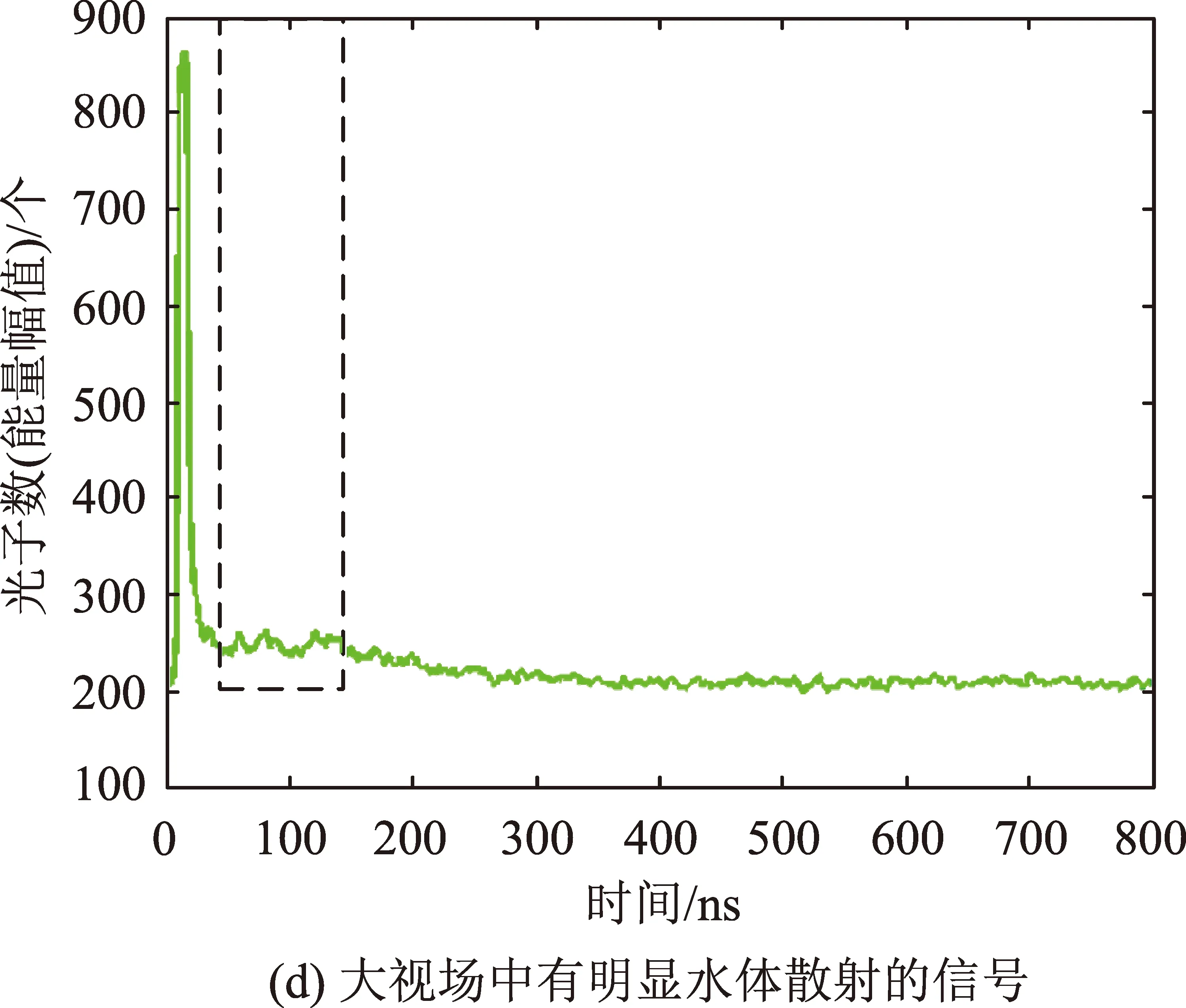
图6 近岸浅水回波分类示意
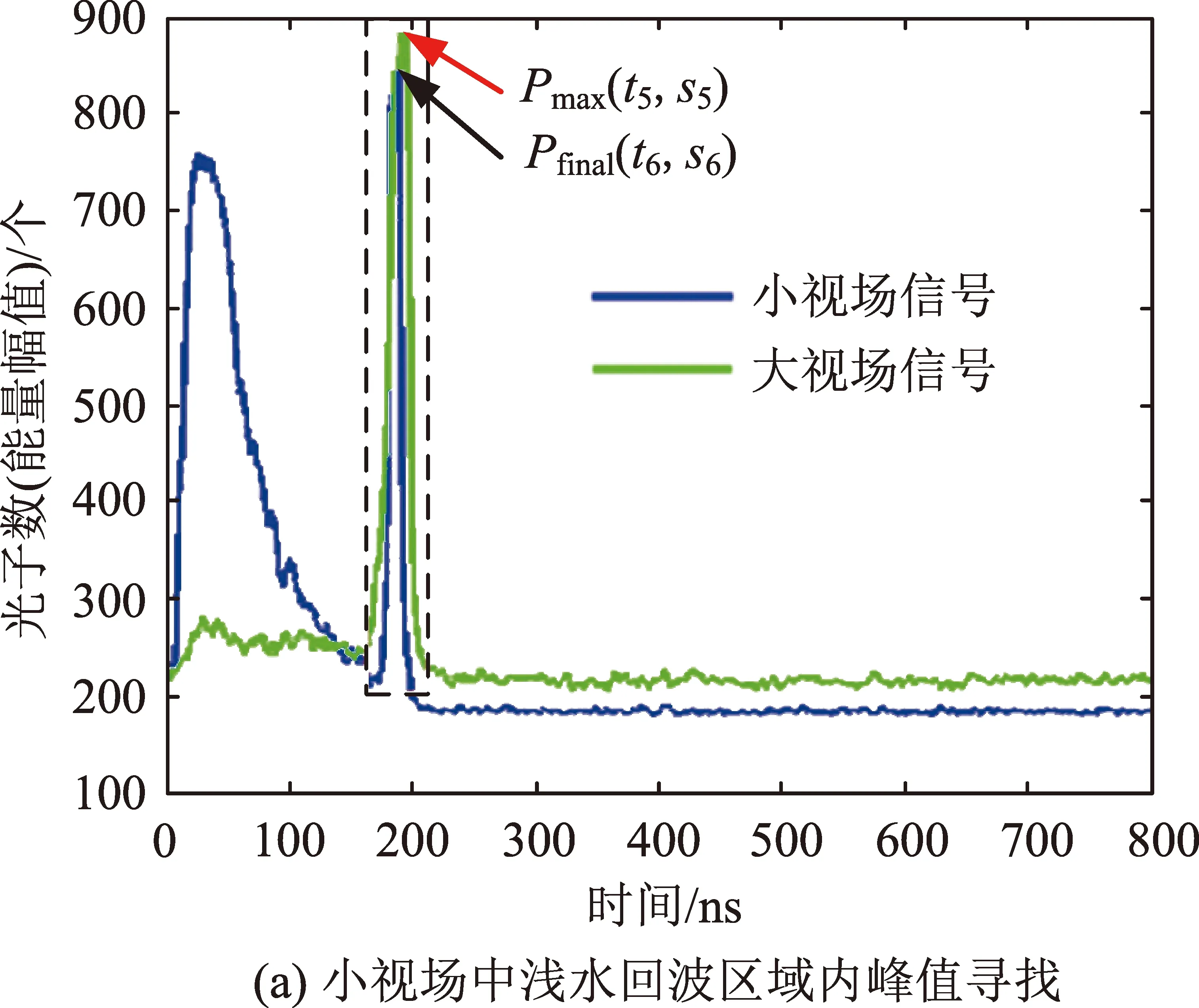
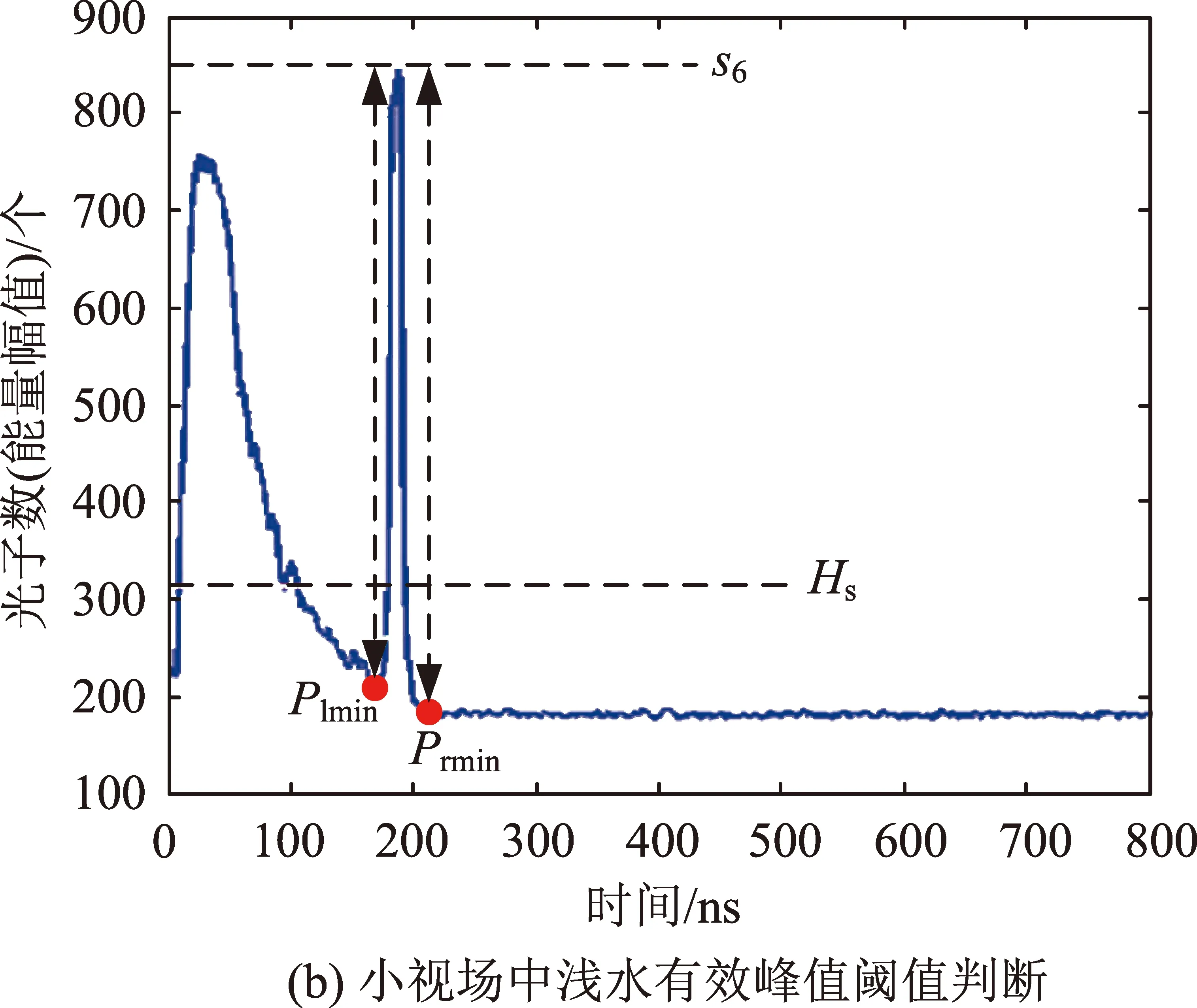
图7 浅水回波信号判断示意
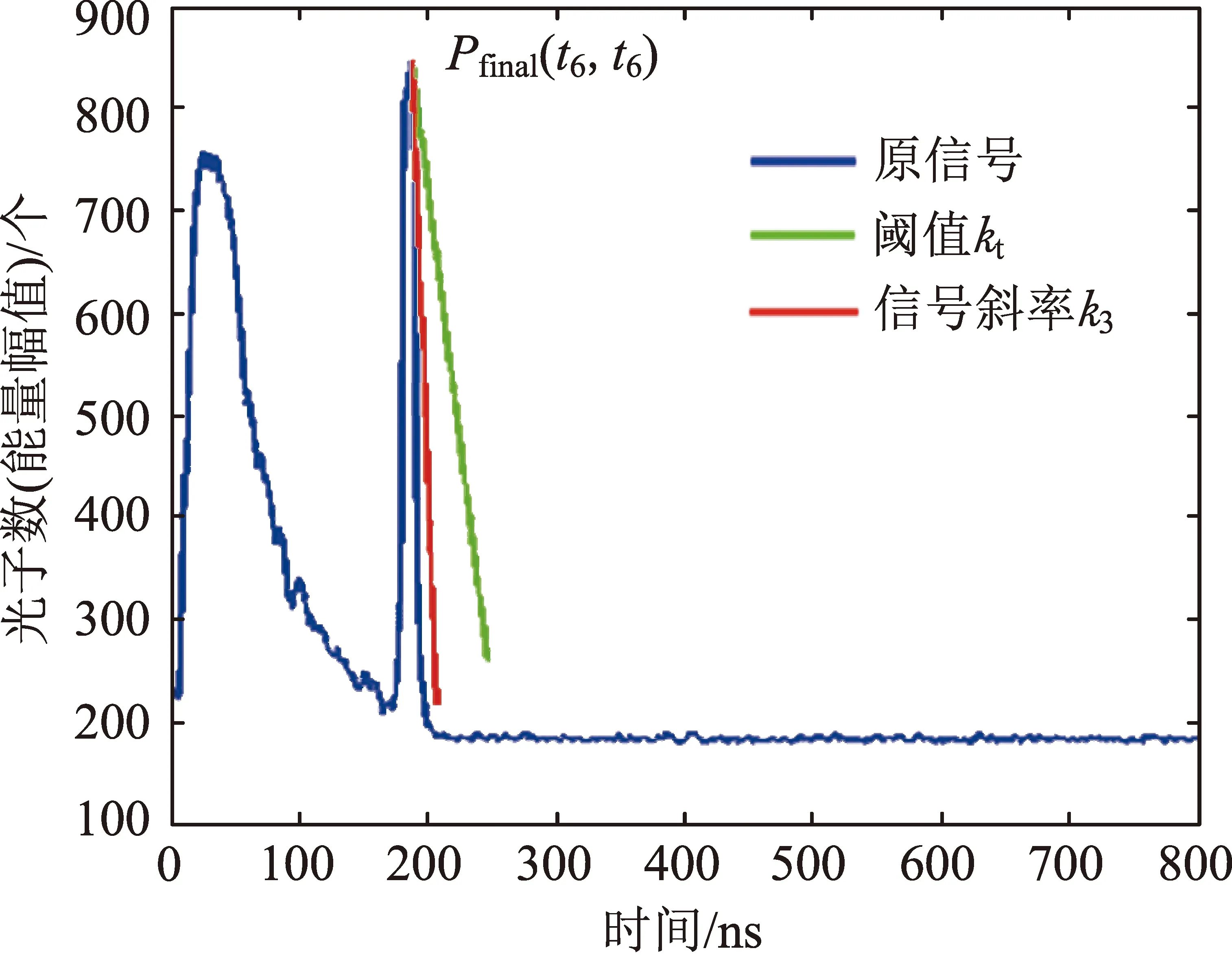
图8 深水、浅水回波分类示意
根据第1节海水回波特性分析可知,深水信号在浅水通道无明显回波,在深水通道可能有明显回波,也可能没有。由于前一种信号海底回波比较明显,峰值提取简单,而后一种为弱信号的提取与检测,需要复杂的信号处理。为了减小运算量,将不需要复杂信号处理的前一种信号分离出来。取海表回波峰值后200 ns数据(对应实际深度大于20 m)寻找最大值Pmax(t8,s8)(如图9所示),根据经验在最大值后10 ns选取一点P9(t9,s9),运用斜率公式(7)计算k4。将求得的斜率k4作为海底回波的衰减系数,选取阈值kr=15作为噪声衰减和海底回波衰减的阈值。如果k4≥kr,则该信号为有明显海底回波的深水信号;否则为没有明显海底回波的深水信号(见图4(b)和图4(c)中信号)。
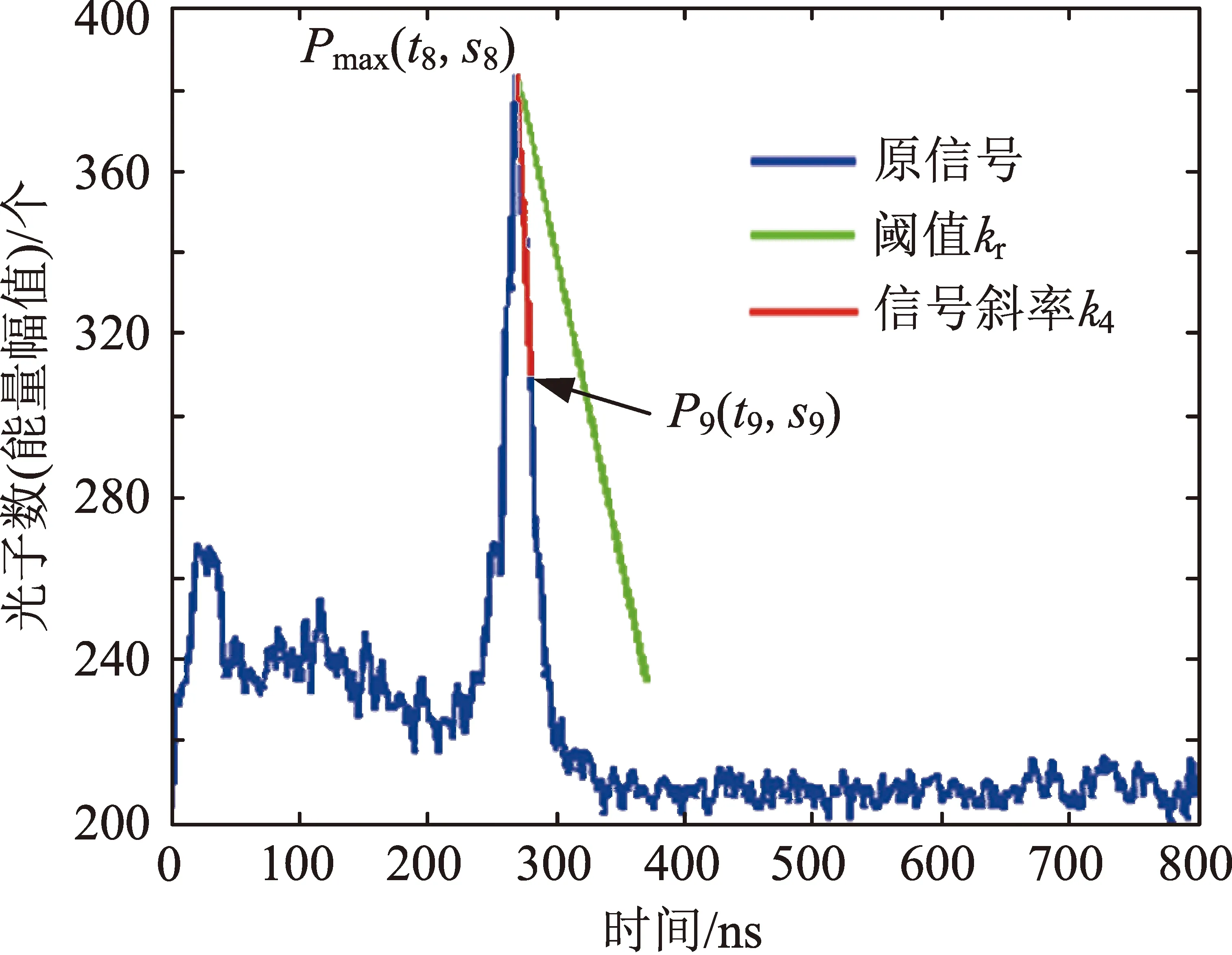
图9 深水有无明显回波分类示意
(7)
本文提出的回波分类方法,可将测深回波进行近岸浅水、浅水和深水分类,以供后续的波形处理方法进行峰值解算,从而进行深度测定。
3 结果分析
利用在南海某岛礁附近机载激光雷达测深数据,验证本文提出回波分类方法的正确性。随机选取8730组回波波形数据,利用本文方法进行处理,获得结果如表1所示。其中:近岸浅水数据1133组,浅水数据1956组,深水数据5641组,方法正确分类结果分别为1133组,1952组,5597组,总体正确率为99.4%。近岸浅水分类成功率为100%,而浅水和深水存在极少部分分类不准确的现象。分析分类不准确的结果发现:深水中存在浅水信号;海底回波的幅值较小,其斜率k3不满足大于阈值kt的条件,后面可通过调整阈值实现分类准确;浅水中混杂了深水信号,其原因是在大视场中把较强的海底散射噪声当成海底回波,影响小视场海底回波的定位,从而影响了分类准确性。

表1 测深回波分类结果
4 结束语
本文分析了目前海洋探测激光雷达测深回波的时域特性,基于海水水体散射和海底回波不同特征,以及不同视场下浅水和深水数据的噪声统计特征,提出一种海洋探测激光雷达测深回波分类方法。通过南海某岛礁附近机载海洋激光雷达测深回波实测数据验证可知,本文分类方法准确率较高,且处理相对简单,易于实现,可为我国星载海洋探测激光雷达技术发展提供有效的技术支持。
致谢
感谢广西创新驱动发展专项(科技重大专项,编号桂科AA18118038)的支持,感谢中国科学院上海光学精密机械研究所提供试验数据。
猜你喜欢
现代电子技术(2022年18期)2022-09-17
航天返回与遥感(2022年3期)2022-07-07
房地产导刊(2022年4期)2022-04-19
东坡赤壁诗词(2022年1期)2022-02-25
舰船科学技术(2021年12期)2021-03-29
当代陕西(2019年8期)2019-05-09
科学与财富(2018年28期)2018-11-16
幼儿教育·父母孩子版(2018年4期)2018-09-13
农产品市场周刊(2018年15期)2018-05-16
航空知识(2017年4期)2017-06-30