双目视觉绳系支撑飞行器模型位姿动态测量
2019-12-27 05:04:20周凡桂王晓光高忠信林麒
航空学报 2019年12期
周凡桂,王晓光,高忠信,林麒
厦门大学 航空航天学院,厦门 361005
风洞试验是飞行器设计研发过程中气动性能评估和气动布局验证的重要手段,对新型飞行器的研制具有重要意义。风洞试验中,飞行器模型的位置和姿态(简称位姿)精度直接影响气动参数的精准度,因此,对于风洞静态/动态试验,要求对飞行器模型实现较高精度的位姿测量[1]。
目前已有多种基于不同原理和技术的风洞模型姿态测量方法,如传统的测量方式,风洞角度机构、加速度迎角传感器以及光学测角仪等,但其作用有限,难以较好地满足风洞动态试验的要求[2-3]。摄影测量是一种光学测量技术,由于其具有非接触性、高精度、干扰小等优点,非常适合用于风洞模型测量,已在美国宇航局和其他国内外研究机构的风洞试验中广泛应用[2-10]。此外,Jones和Lunsford利用双目视觉与合作标志点对高超声速风洞模型姿态变化进行静态测量,精度优于0.1°[4];Lambert等使用VICON商业运动捕捉系统实现了绳牵引飞行器模型六自由度小范围运动的位姿测量[5];张征宇等利用双目视觉配合标志点对风洞弹体模型迎角进行静态测量[6],精度优于0.01°,但该法仅局限于弹体俯仰角静态测量;刘巍等基于双目视觉理论提出一种利用彩色自发光编码标志点的位姿测量方法[7],实现风洞副油箱模型位姿动态测量,取得较好效果。对常规风洞试验而言,现有的位姿测量方法已基本满足要求,然而针对复杂风洞试验的模型位姿动态测量还有待继续深入研究。
绳牵引并联机器人(Wire-Driven Parallel Robot, WDPR)是一种新型机构,其经由驱动、传动部分,通过调整绳索长度可实现模型位姿的控制,为风洞试验提供了一种新型支撑方式[11-12]。绳牵引并联支撑具有较好的动态性能,可为多种风洞复杂动态试验提供稳定支撑。考虑到双目测量具有精度高、组合视场大且稳定性高等优点[13-14],因此为提高动态试验下飞行器模型的闭环控制精度,拟采用双目视觉实现模型的大范围位姿高精度动态测量。
本文首先对绳牵引并联支撑系统进行简要描述;其次,详细介绍利用双目视觉实现绳牵引并联支撑飞行器模型的位姿动态测量方案,并对测量系统的静态和动态测量精度进行验证;最后,以标准动态模型(Standard Dynamic Model,SDM)为实际测量对象,在绳牵引并联支撑样机上对风洞试验3种典型运动进行实际动态测量,并进行误差分析。
1 绳牵引并联机器人支撑系统简介
绳牵引并联机器人支撑系统原理如图1所示,其具体包含4个部分:① 伺服与运动控制子系统,采用上位机、可编程多轴运动控制卡、伺服电机、驱动器等,结合鲁棒控制方法,对模型的运动轨迹实现高精度控制;② 机械传动子系统,采用滚珠丝杠及导向滑轮等组件,实现从驱动部分到飞行器模型位姿之间的运动传递;③ 位姿测量子系统,采用视觉传感器,实现飞行器模型位姿的动态测量;④ 绳拉力和气动力测量子系统,用于实现绳拉力和气动力的实时监测。
系统坐标系定义如图1所示,其中:Owxwywzw表示静坐标系,Omxmymzm表示飞行器模型坐标系,Ocxcyczc表示相机坐标系;风洞坐标系与该支撑系统下零位姿状态的飞行器模型坐标系重合,以模型质心为原点,x轴与飞行器机身轴线平行,指向与来流方向相反;y轴指向翼展右方向;z轴垂直向下。风洞坐标系为静坐标系,而飞行器模型坐标系为动坐标系,此时模型俯仰方向姿态角即为迎角。
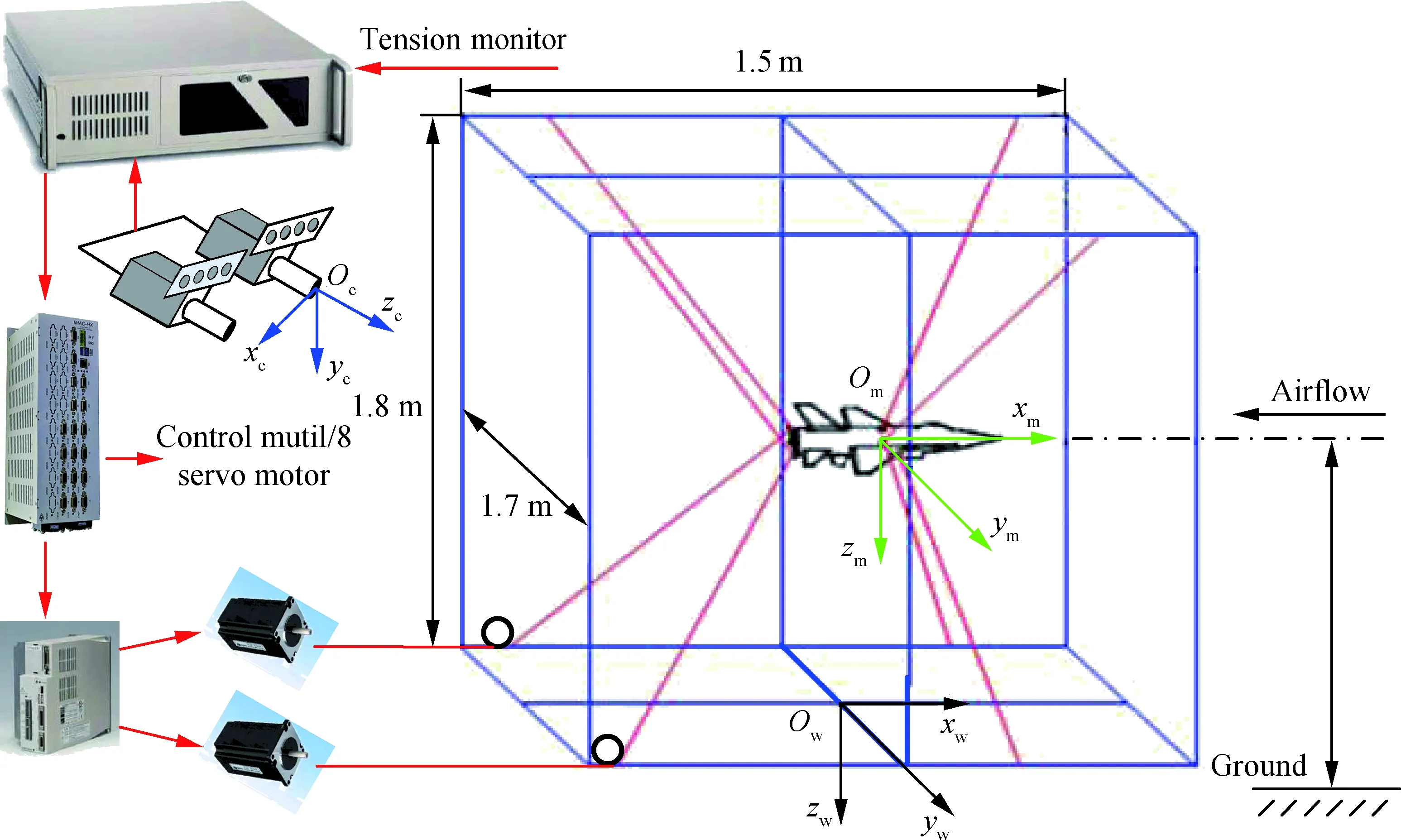
图1 绳牵引并联机器人支撑系统原理示意图
Fig.1 Principle illustration of WDPR suspension system
2 模型位姿测量方案
拟采用双目视觉实现绳牵引并联支撑模型复杂动态运动下的位姿测量。测量方案整体示意图如图2所示。具体以实际测量对象SDM标模尺寸外观为依据,设计了一种编码合作标志点,以实现快速立体匹配;由三角测量原理对标志点三维重构,使用绝对定姿算法初步估计模型位姿,并基于双目重投影误差构建李代数下的无约束最小二乘优化问题,进一步提高测量结果精度。图中Rcm、tcm分别表示相机坐标系与飞行器模型坐标系之间的旋转矩阵和位移向量。
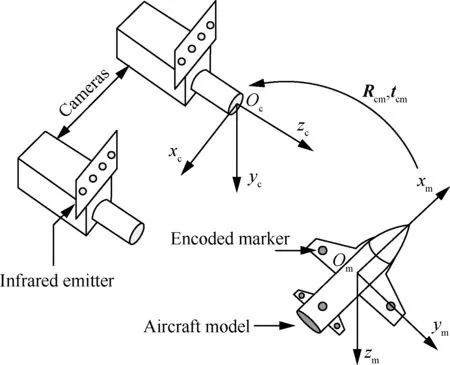
图2 双目视觉测量方案示意图
Fig.2 Illustration of binocular vision measurement scheme
2.1 标志点设计与布置
双目立体视觉特征匹配过程的复杂算法极大地增加了双目位姿估计的时间损耗,降低了系统的实时性[15-16]。这里,根据实际测量对象SDM的外观尺寸,设计了一种如图3所示的编码合作标志点,可通过计算定位圆周围编码圆的个数来对标志点进行解码。
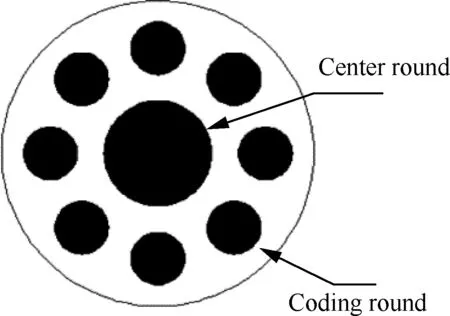
图3 编码合作标志点
Fig.3 Encoded markers
位姿测量过程中,利用图像处理算法对左右相机成像的编码标志点解码,可在数据处理层面迅速实现标志点的立体匹配,如图4所示,这样避免了立体匹配复杂算法的耗时,有效提升了实时性。
根据位姿解算需求,编码标志点可合理布置于模型表面,其中一种布置方式如图5所示。布置标志点时需注意,模型运动过程中至少要有3个标志点可同时双目成像,否则无法实现位姿解算。利用高精度三坐标测量仪对标志点在模型坐标系下的三维坐标进行标定。
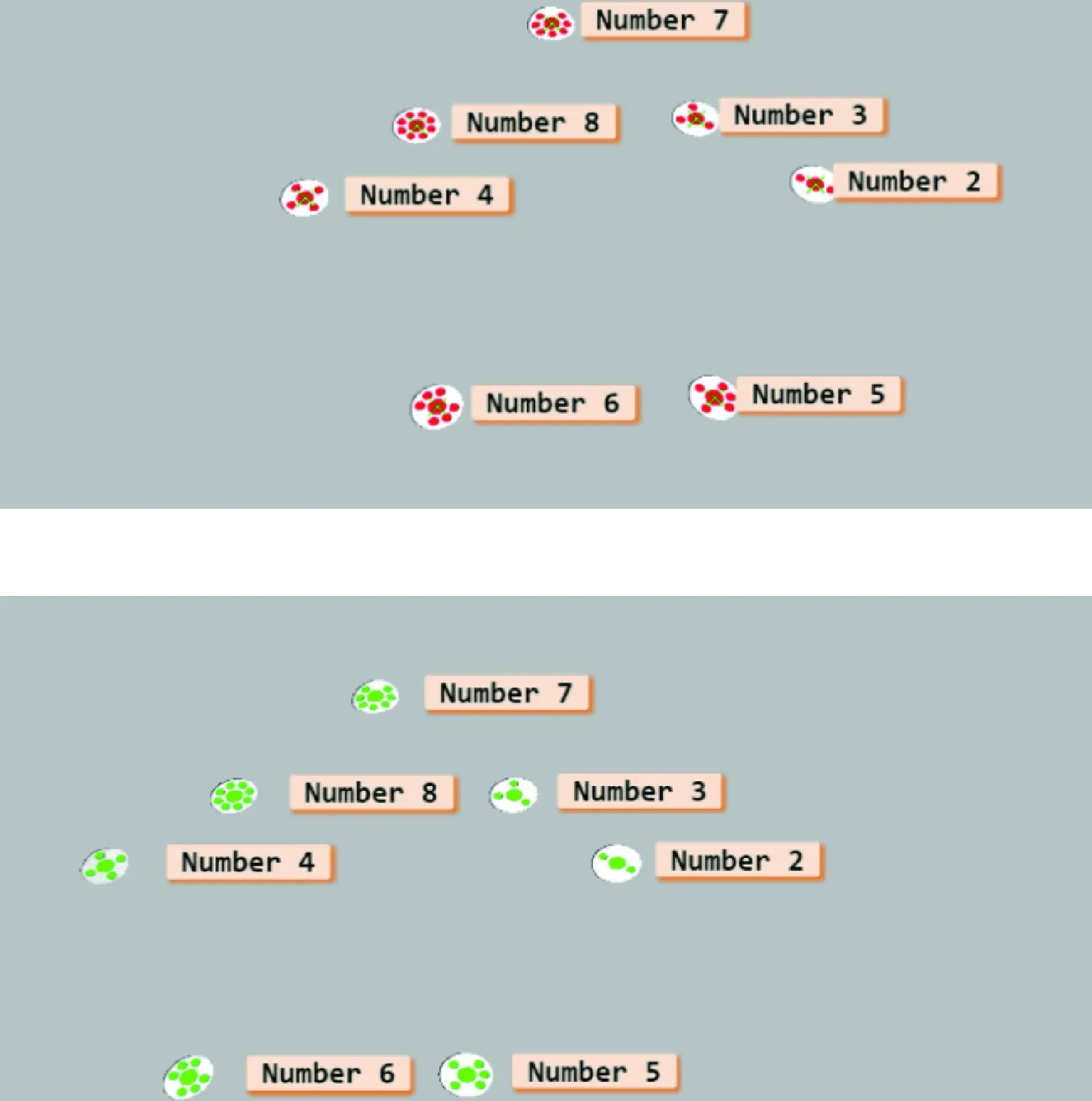
图4 编码标志点识别与快速匹配
Fig.4 Encoded markers recognition and fast matching

图5 编码标志点布置方式
Fig.5 Layout of encoded markers
2.2 标志点识别与三维重构
考虑到相机内参对标志点特征提取精度的影响,首先需要进行相机标定。这里采用传统标定方法,可得投影映射:
su=Kp
(1)
式中:s为尺度因子;u为空间点成像二维像素坐标;p为相机坐标系下的三维空间点;K为相机内参矩阵。
获取原始图像后,需对其进行畸变矫正和立体校正,以及对标志点进行特征提取与解码。在驱动飞行器模型做各种运动过程中,会出现牵引绳遮挡标志点成像的情况,如图6(a)所示,由于牵引绳遮挡,标志点图像被分割成2个区域,影响成像质量,导致无法正确特征提取与解码。
形态学闭运算可弥合图像较窄的间断,恢复标志点成像的整体性,其集合运算具体可表示为[17]
(2)

闭运算先通过膨胀操作弥合黑色间断,恢复标志点成像区域的整体性,如图6(b)所示;再通过腐蚀操作还原标志点成像区域尺寸,如图6(c)所示;最后利用灰度质心法即可得到标志点成像区域中心像素坐标。标志点解码只需正确识别编码圆数量即可,对图6(a)中的标志点成像区域均值滤波,结果如图6(d)所示。黑色间断的灰度值增强,同时编码圆近圆心区域灰度值没有改变,使用较低阈值图像分割,即可正确识别编码圆的个数,实现标志点正确解码,如图6(e)所示,该标志点为6号标志点。
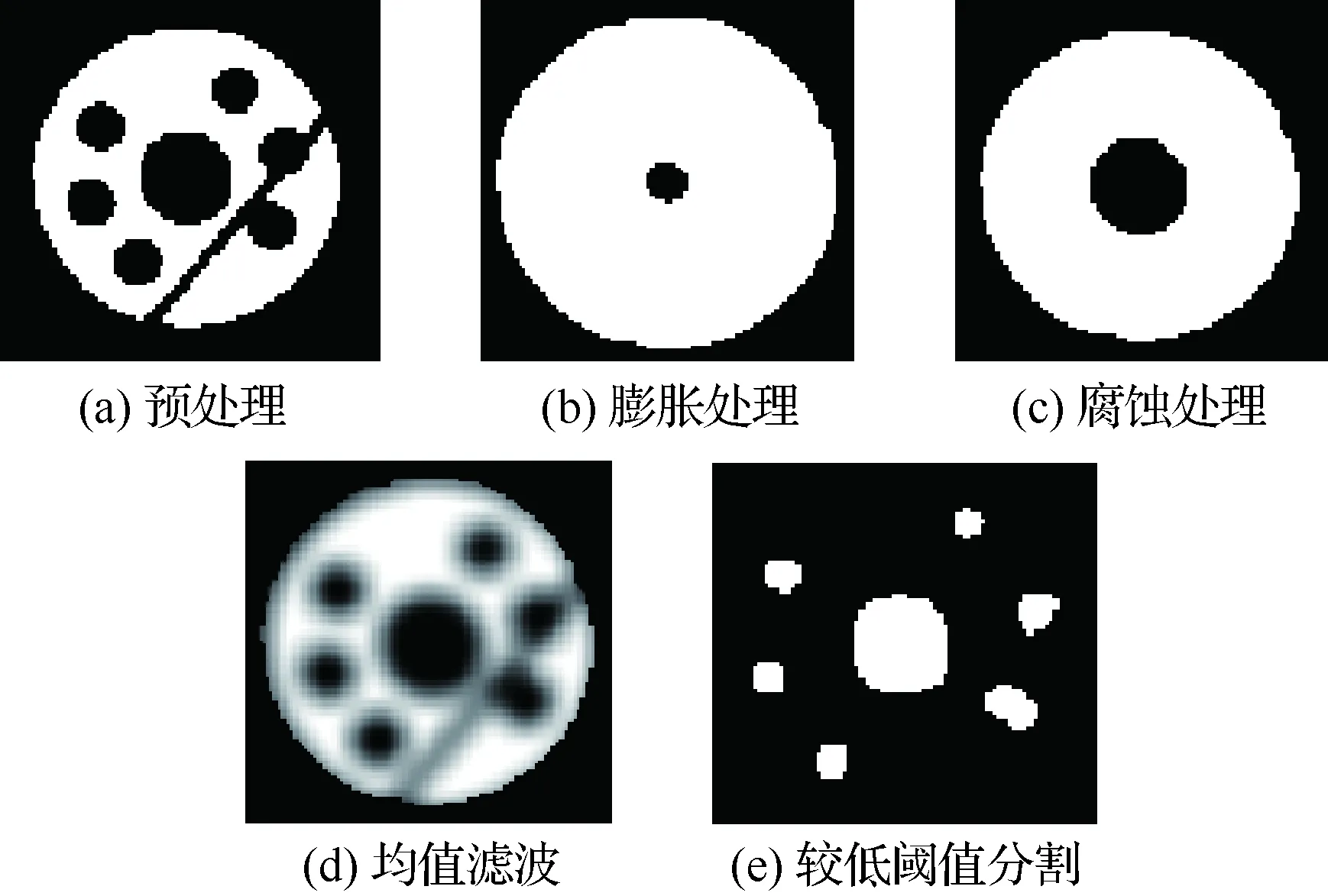
图6 绳对标志点成像干扰及图像处理结果
Fig.6 Interference of cables to markers imaging and image processing results
在获取标志点匹配对之后,基于视差与三角测量原理,如图7所示,可对标志点p进行基于左相机坐标系下坐标的三维重构。图中:c、r表示像素坐标系变量,(c,r)与(u,v)相对应;下标l、r代表左、右相机。
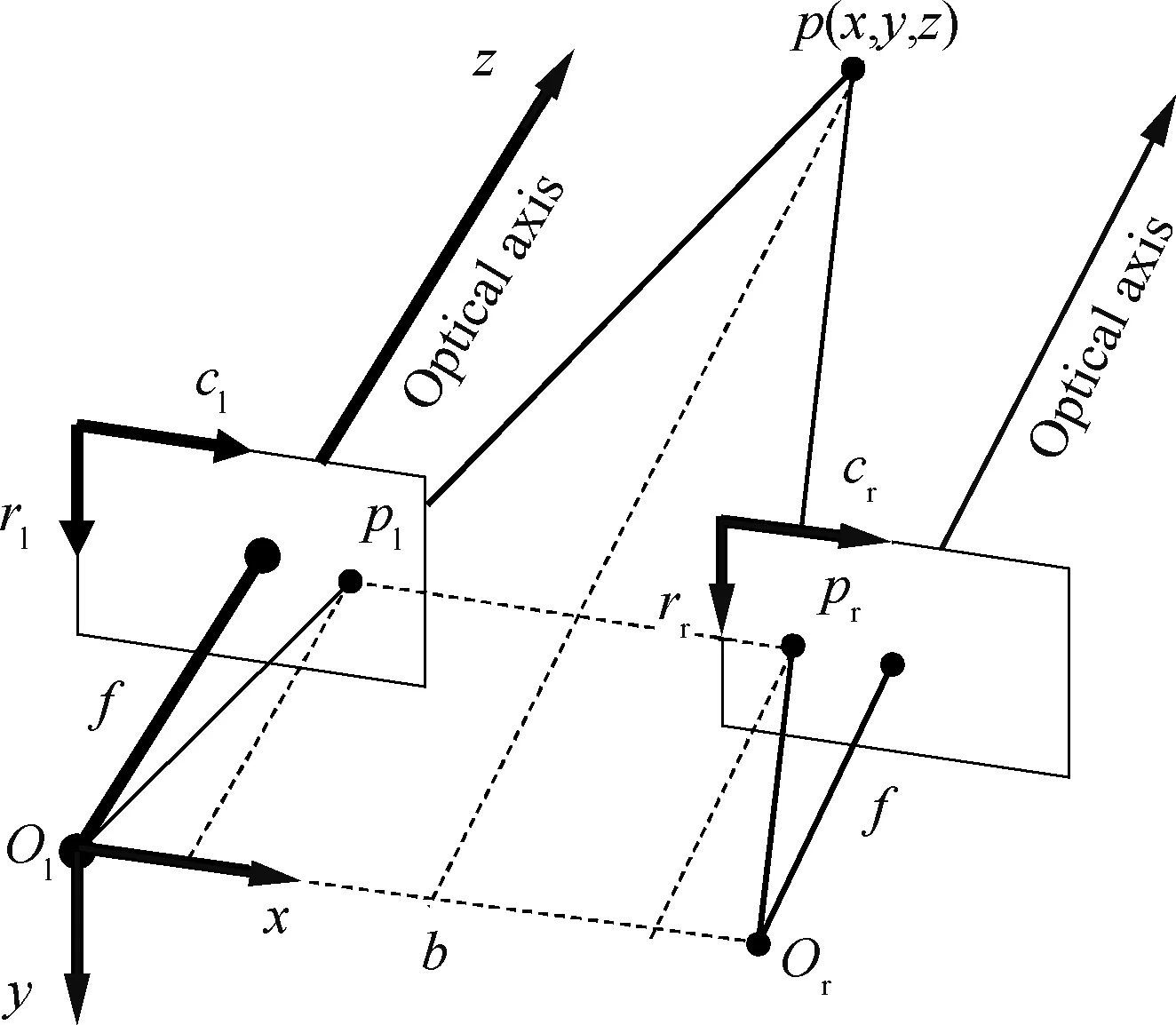
图7 双目立体视觉三维测量原理
Fig.7 3D measurement principle of binocular vision
根据相似三角形关系,可得到标志点在左相机坐标系下的三维坐标为
(3)
式中:f为光学镜头的焦距;b为双目视觉基线,其数值等于左右相机投影中心之间的距离;(u,v)为标志点投影在立体校正后左右成像平面坐标系上的坐标;d=ul-ur为视差。
2.3 位姿初算
飞行器模型位姿求解的本质是确定当前时刻飞行器模型坐标系与风洞坐标系之间的相对变换关系。而双目视觉得到的是左相机坐标系与模型坐标系之间的变换关系,飞行器模型位姿的计算表达式为
(4)

(5)
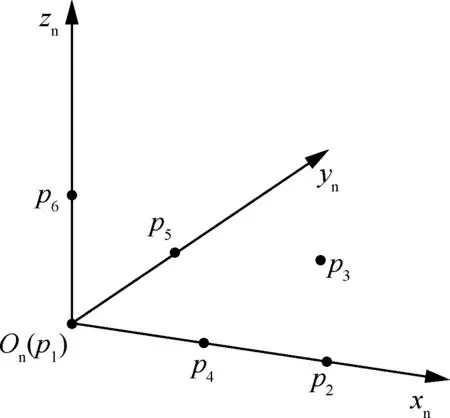
图8 不共线三点构建的新坐标系
Fig.8 New coordinate system constructed by three non-collinear points
由式(5)可得新坐标系Onxyz与左相机坐标系Ocxyz之间的旋转矩阵Rcn;同理可得新坐标系Onxyz与运动模型坐标系Omxyz之间的旋转矩阵Rmn;从而得到模型坐标系Omxyz到左相机坐标系Ocxyz之间的旋转矩阵Rcm与平移向量tcm为
(6)
式中:pc1、pm1分别为标志点p1在相机坐标系和飞行器模型坐标系中的三维坐标矢量表示。
2.4 测量误差理论分析

(7)

(8)
(9)

(10)

2.5 位姿优化
绝对定姿算法可以得到左相机和模型相对位姿的解析解,然而实际测量中标志点三坐标仪坐标标定和双目视觉三维重构均存在一定误差,若单一使用绝对定姿方法计算相对位姿,则结果存在较大误差,因此需要对位姿初值进一步优化。这也是使用多个标志点的原因,可利用多个标志点冗余信息来提高位姿结果优化精度。
由于测量误差的存在,式(1)无法准确成立,单个相机下标志点的投影误差可表示为
(11)
式中:ξ为李代数表示的相对位姿;exp(ξ∧)表示单个相机与模型之间的相对位姿变换矩阵;pi为标志点在模型局部坐标系下的三维坐标。
基于标志点在左右相机二维像素坐标(3D-2D)的重投影误差,构建李代数下的无约束最小二乘优化问题,将初步解算结果作为迭代初始值,使用Levenberg-Marquardt优化算法对位姿进一步优化,即
(12)
3 测量精度验证与分析
为了验证测量方案的可行性,对系统测量精度进行验证。视觉测量硬件系统由工作站、2 448像素×2 048像素工业相机、850 nm红外光源、8 mm焦距镜头、红外滤光片、圆点阵列标定板以及编码合作标志点构成。双目相机是由2台出厂性能参数完全一致的工业相机构成,软件同步触发,使用USB3.0进行数据传输,帧频最高可达100 Hz。
值得说明的是,动态测量精度比静态精度差,其中一个主要原因是由模型运动成像拖影造成的,成像拖影长度与相机曝光时间和模型运动速度正相关。因此,当双目位姿软件解算速度一定时,可根据比例关系,适当增大曝光时间,调慢运动速度,维持测量系统的精度。
3.1 优化算法精度验证
为验证基于式(12)的优化算法的有效性,对比了单独采用传统绝对定姿算法的测量结果。具体通过机械方式调节小型转台,如图9所示,多次调整并记录标定板模型的旋转角度,分别采用传统和优化2种算法进行测量,测量结果如图10所示。结果表明,与传统算法测量误差相比,经过位姿优化算法的测量精度得到明显提高,因此,下文所涉及的静/动态位姿解算都将采用优化算法。
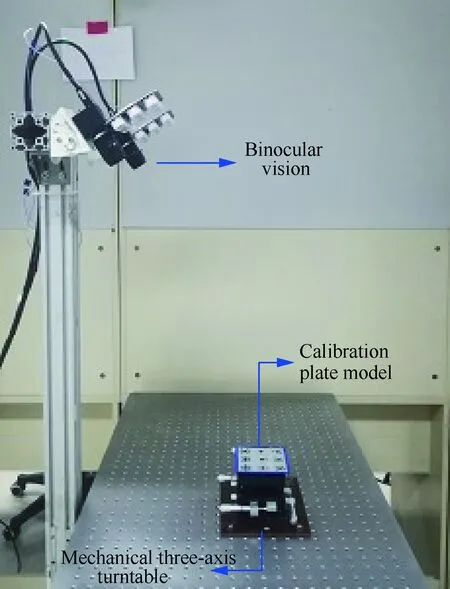
图9 静态测量精度验证装置
Fig.9 Device of static measurement accuracy validations
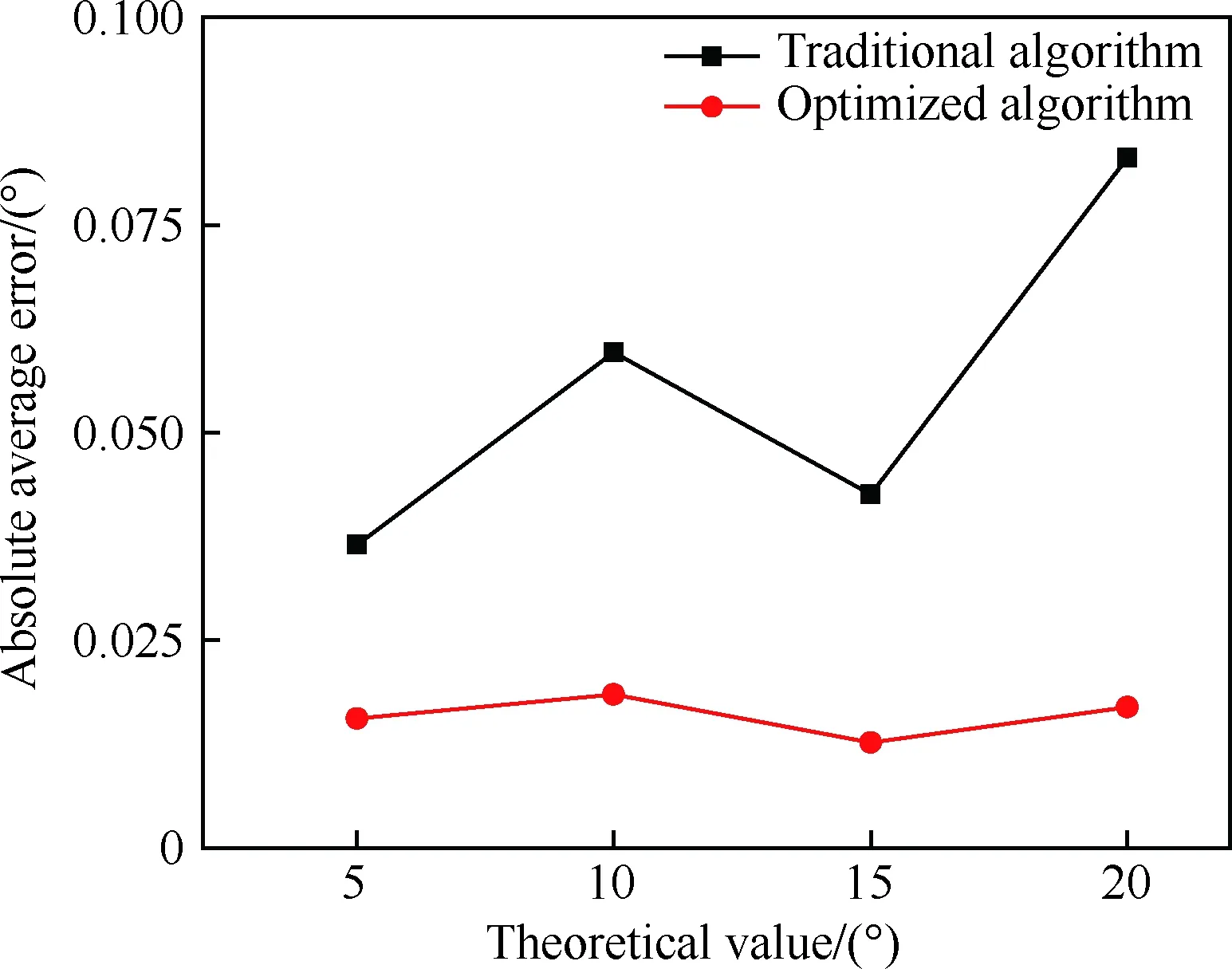
图10 两种算法测量结果对比
Fig.10 Comparison of measurement results by two algorithms
3.2 静态测量精度验证
静态测量精度验证使用高精度机械三轴转台,其旋转精度为0.005°,位移精度为0.005 mm。可将标定板验证模型固定在三轴转台上,通过调节旋钮可对模型x、y、z方向位移和旋转角度实现一定的变化,视觉测量系统对模型位姿变化进行测量,比对测量结果与机械读数。
对模型执行x轴方向移动10 mm,角度转动10°,重复测量100次的测量结果误差如图11所示。由测量结果可得,静态角度测量精度优于0.02°,位移测量精度优于0.02 mm。
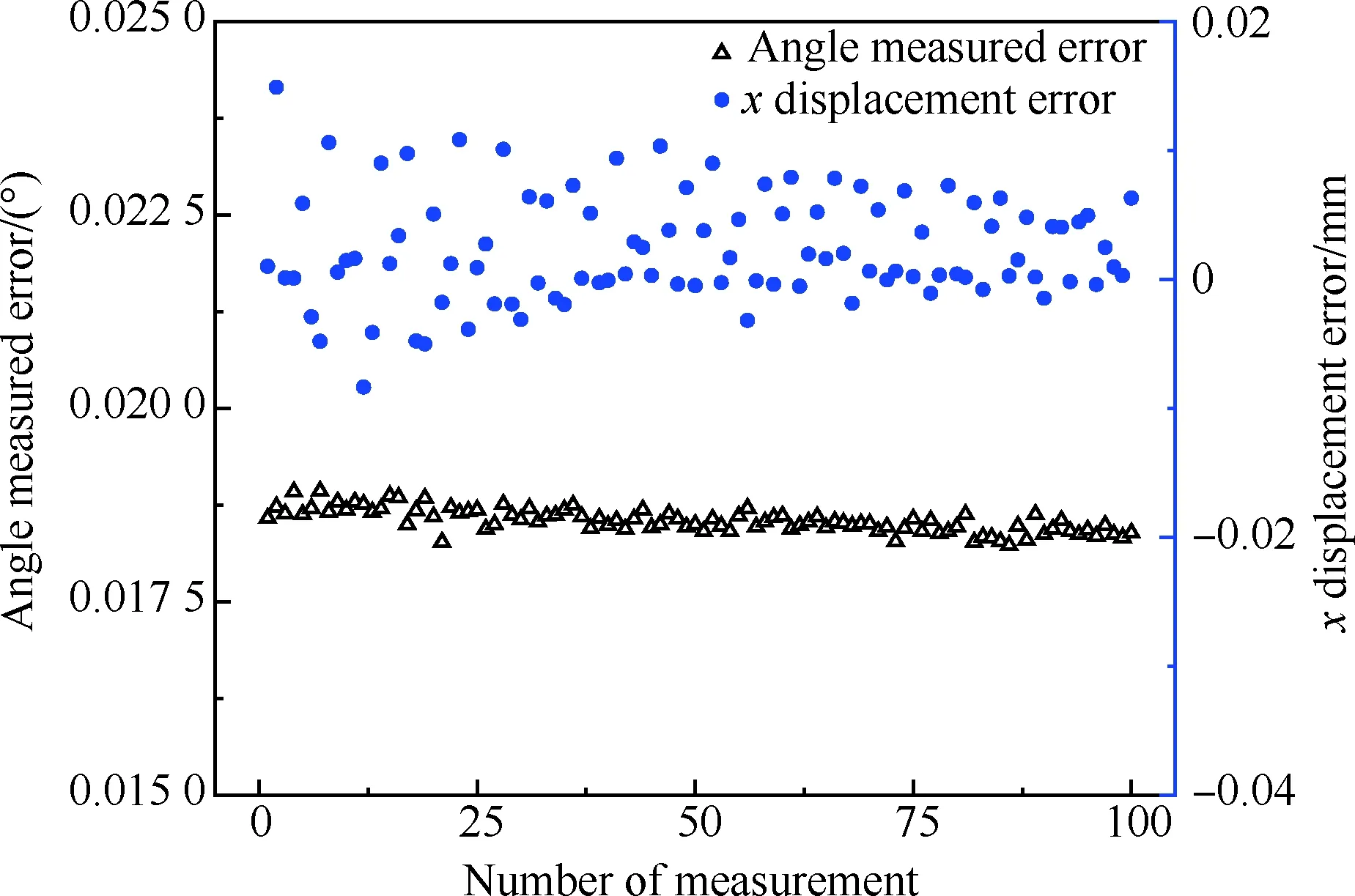
图11 静态角度与位移测量误差
Fig.11 Measurement error of static angle and displacement
3.3 动态测量精度验证
动态测量精度验证使用高精度步进导轨,其位移精度为0.01 mm。如图12所示,将标定板模型固定在移动平台上,通过控制器可动态实现一定位移,视觉测量系统对模型位姿变化进行测量,比对测量结果与实际位移。
对模型执行x轴方向动态移动10 mm,运动速度约为0.3 mm/s,曝光时间设置为1 ms。测量结果与动态运动阶段测量误差分别如图13和图14所示。由测量结果可知,动态位移最大测量误差小于0.04 mm,绝对值平均误差约为0.025 mm。由此可见,在此运动情况下,双目测量系统具备较高精度的动态测量能力。

图12 动态测量精度验证装置
Fig.12 Device of dynamic measurement accuracy validations
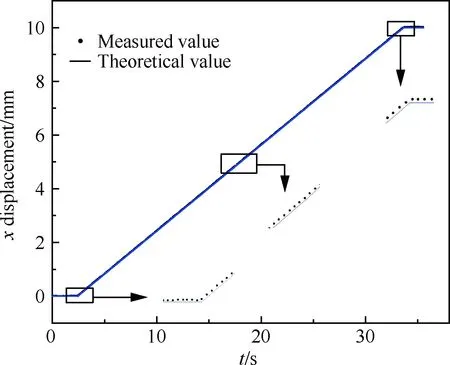
图13 动态位移测量结果
Fig.13 Measurement results of dynamic displacement
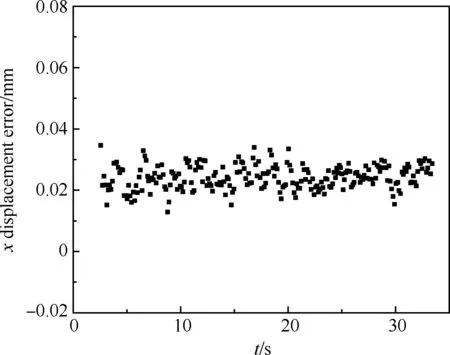
图14 动态位移测量误差
Fig.14 Measurement error of dynamic displacement
3.4 典型动态轨迹测量
为了进一步验证该双目测量系统在实际工程应用中的可行性,本文在如图15所示的绳牵引并联支撑机构上以SDM标模为测量对象,对风洞试验3种典型运动轨迹进行实际动态测量。其中,基于绳牵引并联支撑系统的运动学、动力学分析[20],通过调整绳长可以实现飞行器模型的运动轨迹控制。
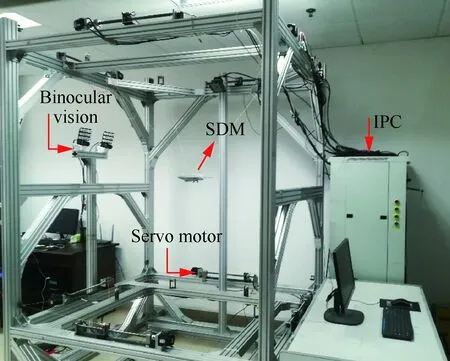
图15 绳牵引并联支撑样机
Fig.15 Wire-driven parallel suspension mechanism
1) 飞行器模型做大迎角线性运动。其理论轨迹可表示为θ=5·t,俯仰角θ从0°~50°线性变化,运动时间约为10 s。俯仰角运动理论轨迹与实际测量结果如图16所示。
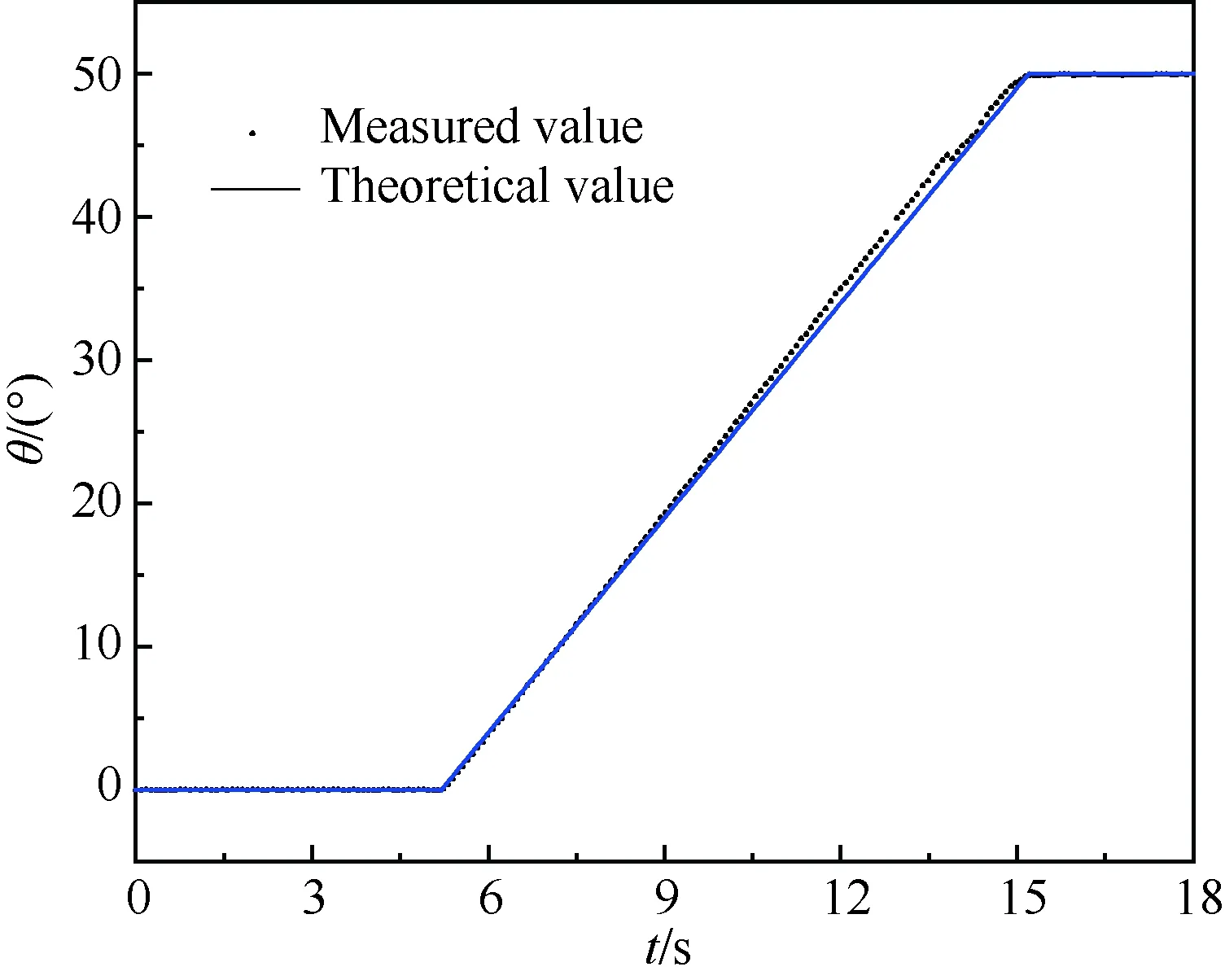
图16 大迎角动态运动测量结果
Fig.16 Measurement results of high angle of attack dynamic motion
对比数据可知,俯仰角在0°~30°运动期间,绝对值平均误差小于0.3°;在俯仰角逐渐增大至30°~50°时,俯仰角测量误差有所增大,但整体绝对值平均误差小于0.5°。

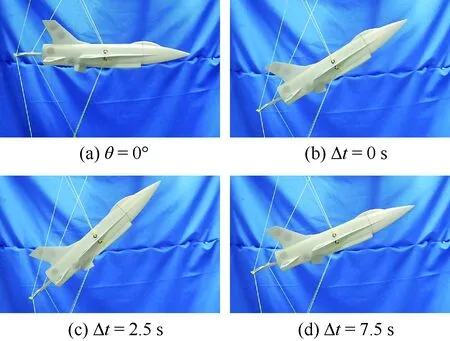
图17 俯仰振荡运动侧视图Fig.17 Side views of pitch oscillation motion
经双目视觉测定后,俯仰振荡运动的理论曲线与实际测量结果如图18所示。对比可知,测量值与理论轨迹基本吻合,俯仰角测量误差在振荡峰值附近偏大,但最大测量误差仍小于0.5°,绝对值平均误差为0.19°。
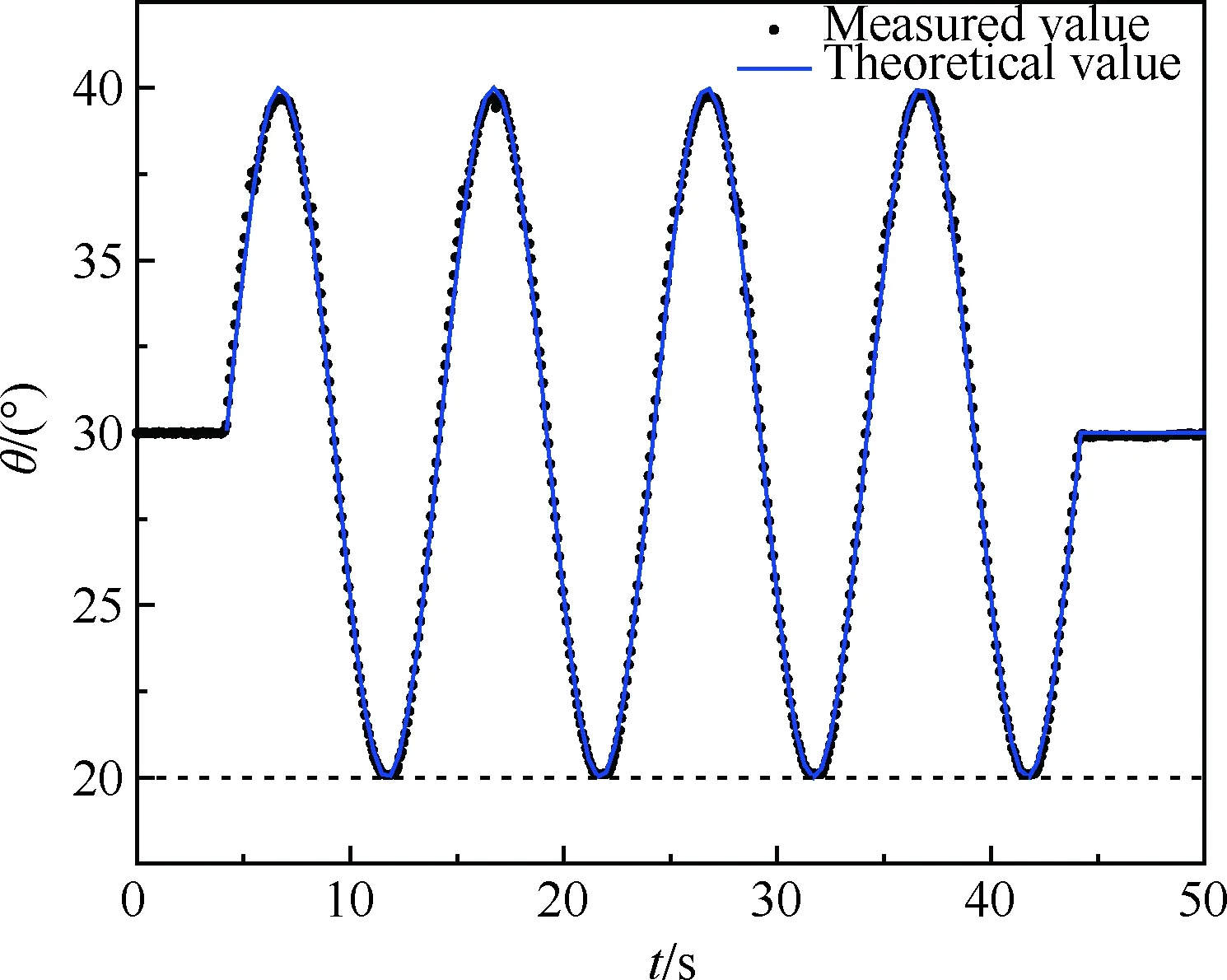
图18 俯仰振荡测量结果
Fig.18 Measurement results of pitch oscillation
3) 飞行器模型做升沉、俯仰、滚转三自由度耦合振荡运动。其理论运动轨迹可分别表示为:z=20·sin(πt/10)、θ=10·sin(πt/10)、φ=10·sin(πt/10)。升沉振幅为20 mm,俯仰与滚转振幅均为10°;振荡频率均为0.05 Hz。图19显示三自由度耦合运动过程瞬间,示例给出零位姿状态与3组升沉/俯仰/滚转耦合运动状态。
经双目视觉测定后,三自由度耦合运动的理论曲线与实际测量结果如图20所示。经多次试验验证,可知3种测量结果与理论轨迹均比较吻合。其中,俯仰角绝对值平均误差为0.31°;滚转角绝对值平均误差为0.23°;与单自由度振荡相比,耦合振荡时升沉位移误差相对较大,但整体绝对值平均误差仍可达0.4 mm,相对误差为2%。

图19 三自由度耦合运动侧视图
Fig.19 Side views of three DoF coupling motion
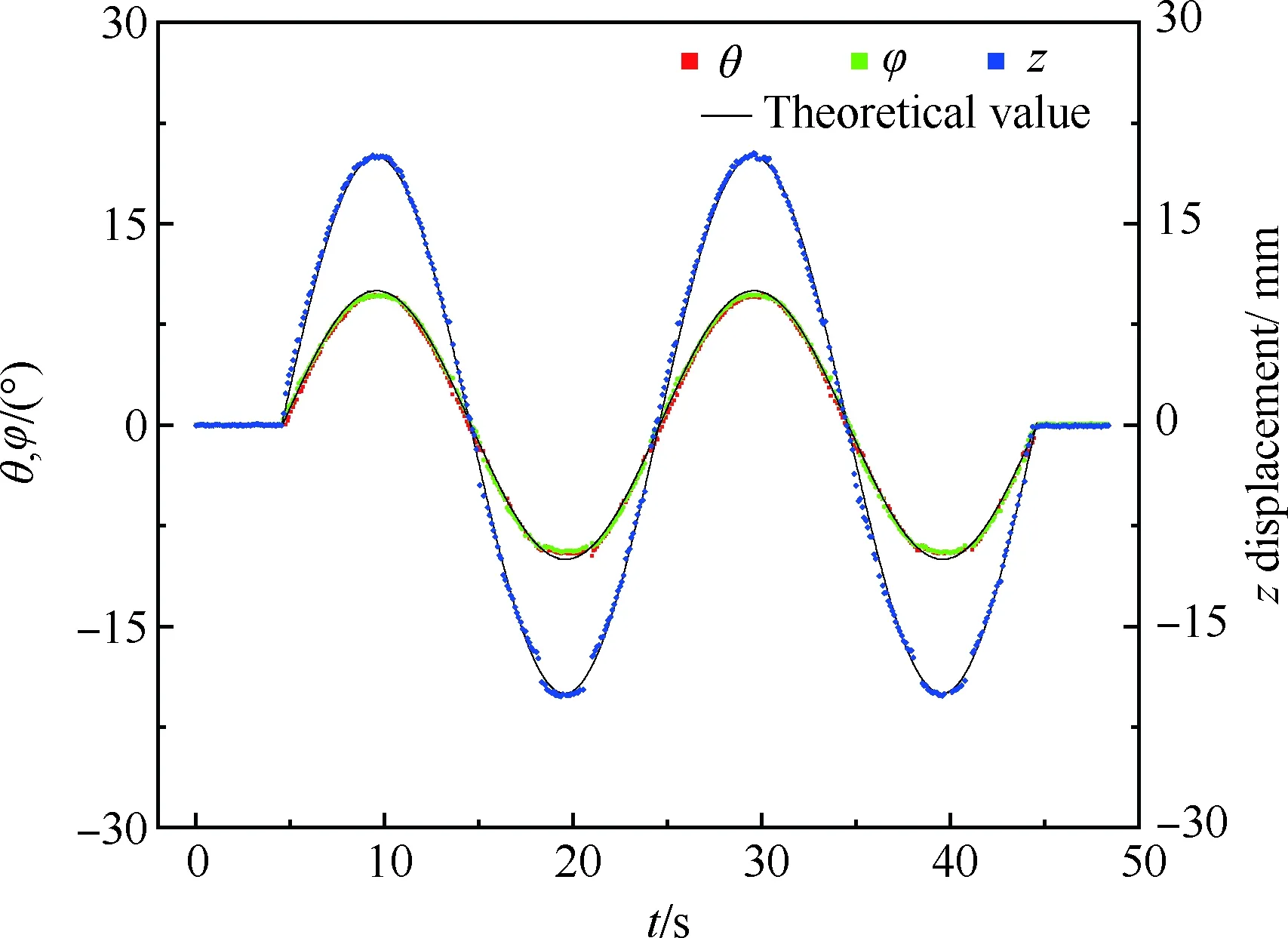
图20 三自由度耦合运动测量结果
Fig.20 Measurement results of three DoF coupling motion
3.5 试验误差分析
由上述试验结果可知,双目视觉位姿测量系统具有较高的动态测量精度,基本满足风洞动态试验的精度要求,但仍存在一定误差,具体原因分析如下:
1) 立体视觉标定误差。本文立体视觉相机内外参使用传统标定方法,标定结果存在微小误差。
2) 标志点模型坐标系三维坐标测量误差。利用高精度三坐标测量仪对标志点坐标标定是人为操作,不可避免存在一定误差,导致模型实际坐标系与理论坐标系有所偏差,对位姿解算产生影响。
3) 动态测量过程标志点成像的拖影。由于相机成像曝光时间和模型运动速度存在,标志点成像会产生拖影,导致标志点特征提取存在一定误差。
4) 运动控制误差。绳牵引并联支撑原理样机经由驱动、传动机构,通过绳长变化控制飞行器模型的位置和姿态,会产生一定的误差累积,进而影响实际运动精度和测量精度。
4 结 论
本文针对绳牵引并联支撑飞行器模型大范围动态运动,发展了一种基于双目立体视觉的模型位姿动态测量方法,相关结论如下:
1) 分别进行了静态、动态测量精度验证,结果显示静态时角度精度优于0.02°,位移精度优于0.02 mm。
2) 在绳牵引并联机构样机上对风洞试验3种典型运动轨迹实际测量,角度精度可达到0.1°量级,位移绝对值平均误差为0.4 mm。测量精度基本满足风洞动态试验要求,证明该测量方案是有效可行的。
3) 由测量误差分析可知,可从标定方式或算法、动态拖影图像处理算法和绳牵引并联机构采用高精度闭环控制等方面给予改进,以进一步提高系统测量精度。
该测量方案在实际风洞试验中应用还需进一步完善,如在标志点周围涂抹丙烯酸或将标志点改成模型内嵌自发光方式等以减小对流场的干扰,提高风洞试验精度。
猜你喜欢
计算机测量与控制(2024年2期)2024-02-29 04:22:22
电子制作(2019年20期)2019-12-04 03:51:38
测控技术(2018年12期)2018-11-25 09:37:20
传感器与微系统(2018年7期)2018-08-29 00:44:24
光学精密工程(2016年5期)2016-11-07 09:05:55
光学精密工程(2016年4期)2016-11-07 09:05:11
现代计算机(2016年11期)2016-02-28 18:35:20
湖北工业大学学报(2016年5期)2016-02-27 13:14:48
计算机工程与设计(2014年9期)2014-12-23 01:16:00
组合机床与自动化加工技术(2014年12期)2014-03-01 02:22:51