INDRA二次雷达TCPU板断电重新装载程序方法的研究
2019-12-26 11:57:58肖仁胜
微处理机 2019年6期
肖仁胜
(中国民用航空中南地区空中交通管理局湖北分局,武汉430000)
1 引 言
雷达作为空中交通管制的重要监视手段之一,其稳定、可靠运行是保障民航安全高效运输的坚实基础[1]。IRS-20MP/L 是一款由西班牙英德拉公司生产的具备S 模式功能的二次雷达[2]。该型雷达系统具备双通道热备份功能,主要功能是为其覆盖区域内的空中交通管制员提供空中飞行器的实时动态监视信息。根据设备厂家维护手册的相关要求,位于雷达系统录取器部分的TCPU 板的IC 电池每隔5 年须更换,而板件的实时时钟(Real Time Clock, RTC)和软件重启配置文件均存储在其NVRAM 存储器中,在电池更换过程中会全部丢失。因此,在更换该板件的IC 电池后,对TCPU 板重新装载实时时钟和软件重启配置程序,应采用何种方法,对恢复该部分原有功能尤为重要。同时,鉴于该雷达系统属于进口设备,设备的备件采购、送修周期长[3],且价格昂贵,掌握TCPU 板IC 电池更换及其重新装载程序的方法对于空管技术人员后续维护INDRA 二次雷达是有着迫切的必要性的。
2 录取器组成及TCPU 板功能
2.1 录取器的基本组成
IRS-20MP/L 询问机是一个双通道冗余系统,每个通道主要由S 模式发射机、发射机-接收机-天线接口单元、发射机电源、发射机风扇单元、多通道接收机单元、S 模式录取器、S 模式录取器风扇单元、S模式录取器电源等部分组成[4]。
其中,S 模式录取器单元负责接收并处理从接收机送来的视频信号,并检测SSR 与S 模式应答,生成所有目标的点迹信息,送至ATC 与雷达维护显示器。此外,它还向发射机提供调制信号,必要时可以进行重复询问。
录取器由电源模块、多通道接收机单元、构成雷达数据录取器的数字电路组件板、录取器风扇、测试面板等组成。其数字组件中的处理模块MCPU包括TCPD、TDLS 和TCPU 三个部分。
TCPD 即控制与数字处理板,负责执行数字信号处理(应答检测与译码)和对S 模式工作下的实时通道控制功能[5]。它具有一个强大的FPGA 处理器,包含10000000 个门电路和两个嵌入式的Power PCO 处理器。
TDLS 是串行数据分配板,负责提供多种传输协议串行接口,包含两个组成部分:串行数据输出板TRLS 与串行数据分配适配器板TADLS;
TCPU 为中央处理器,它是基于单PowerPCO 芯片的处理器。
录取器单元结构与组成如图1 所示。
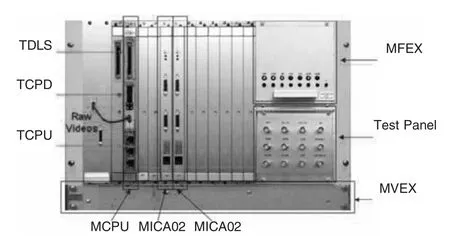
图1 录取器单元结构与各组成部分
2.2 TCPU 板基本功能
TCPU 板的功能主要有以下几个方面[6]:
(1) 链路控制(LC):将FW-TCPD 板处理的SSR与S 模式应答信息发送给点迹生成单元。决定需要向飞机询问哪些数据,并将其发送SW-TCPD(询问调度功能);为系统提供必要的机制,对其功能进行监控。针对系统运行的过载情况进行监视,并针对过载情况对CAM(控制和监视)给出提示,如果产生过载,LC 将减少覆盖距离,只对感兴趣区域的目标进行处理。
(2) 处理所有从实时通道控制器(RTCC)发送来的SSR 与S 模式应答报告;对航迹与目标进行相关处理,包括假目标检测与去除;以AST 格式输出数据;生成控制选呼列表。
(3) 链路管理处理(LMP):控制除S 模式全呼询问以外所有S 模式数据链路处理。
(4) 通信管理处理(CMP):处理所有从数据链路送来的数据链路交换服务请求。
(5) 监视协调单元(SCF):根据雷达站的设定规划保证S 模式地面站有效工作,并尽可能减少射频污染。通过正确使用II/SI 代码、S 模式协议、应答机全呼锁定、覆盖范围配置以及目标移交以避免地面站之间的相互干扰。
综合上述分析,TCPU 板作为雷达数据处理部分的重要组成部分之一,其安全稳定运行是雷达发挥其自身功能的重要保障。因此,对TCPU 板IC 电池的更换及更换后重新加载相关程序的研究必然具有重大意义。
3 TCPU 板IC 电池更换及程序加载
3.1 TCPU 板IC 电池的更换
按照INDRA 雷达设备技术手册的相关要求执行雷达单通道停机程序。取出MCPU 板,拔出TCPD与TDLS 两个扩展板卡,用起拔器拔出TCPU 板上旧IC 电池,更换新电池。注意电池的安装方向,电池一角的黑点标记在正确安装时的位置如图2 所示。

图2 IC 电池安装位置
3.2 TCPU 板程序加载
电池更换完成后,TCPU 板中RTC 和SW boot参数需要重新加载。加载这些参数需要采用串行通信方式,将PC 和TCPU 板通过RJ45/RS232 线连接在一起。各颜色线缆与不同端口引脚之间的连接方式如表1。
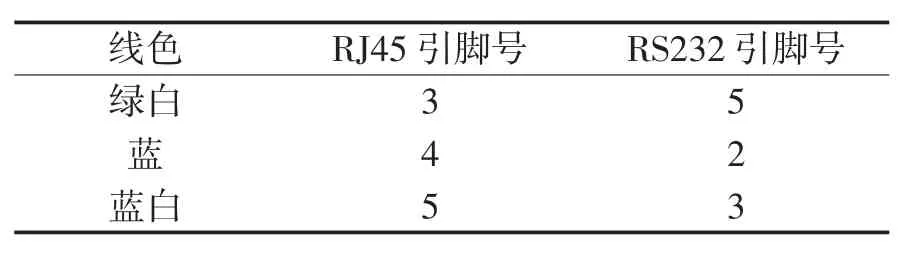
表1 加载参数时串行通信连线情况
然后进行J8 跳线设置,将TCPU 板上J8 的跳线由1—2 变为2—3 位置,如图3 所示。
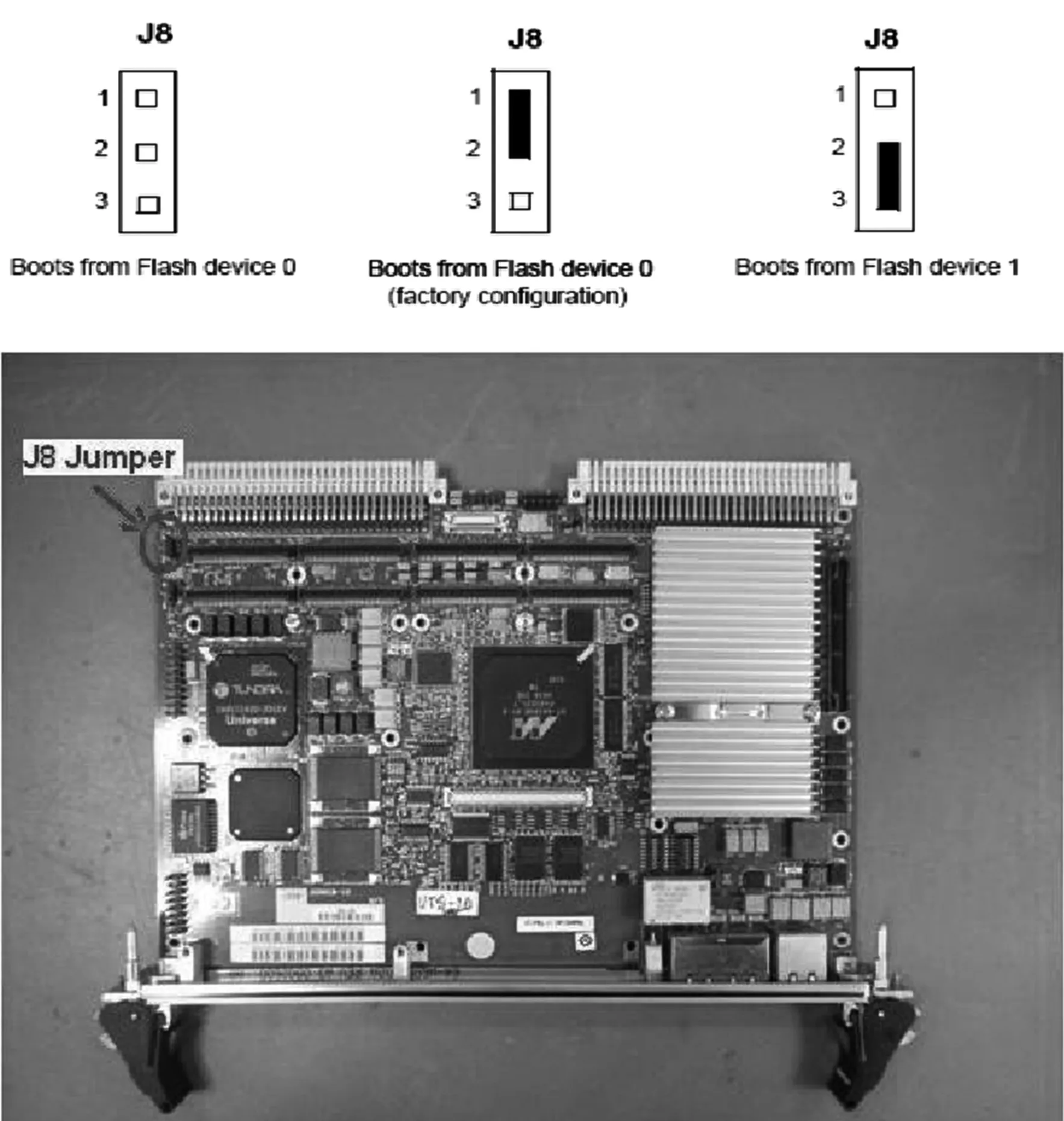
图3 J8 跳线设置
将TCPU 板重新安装到设备上,按照INDRA 雷达设备开机程序给TCPU 板加电。使用RJ45/RS232串口线缆中的RJ45 端连接TCPU 板前面板COM1端口[7],线缆另一端连接至PC 端串口。启动PC 超级终端程序,设置完成后,将超级终端打开,连接成功后,在超级终端上会立刻显示“MVME5500>”信息。如果不能显示,通过呼叫显示“MVME5500>”信息[8]。
如上信息正常显示后,通过以下指令设置RTC时间:

注意“-d”“-t”之前要有空格。其中各关键字定义为:
MM:当前月份;
DD:当前日期;
YY:当前年份后两位数字;
HH:当前时;
MM:当前分;
SS:当前秒(近似值)
例如输入“set -d/dev/rtc -t111419152335”即设置为2019 年11 月14 日15 时23 分35 秒。时间设置完成之后,关闭系统,拔出TCPU 板,恢复J8 跳线的位置为1—2,上机至机柜,配置SW boot 参数。
系统开机后,在超级终端上显示加载VxWorks System Boot 信息,片刻后,显示“[VxWorks Boot]:”信息,此时输入c,然后按Enter 键,并按照表2 加载SW boot 参数。
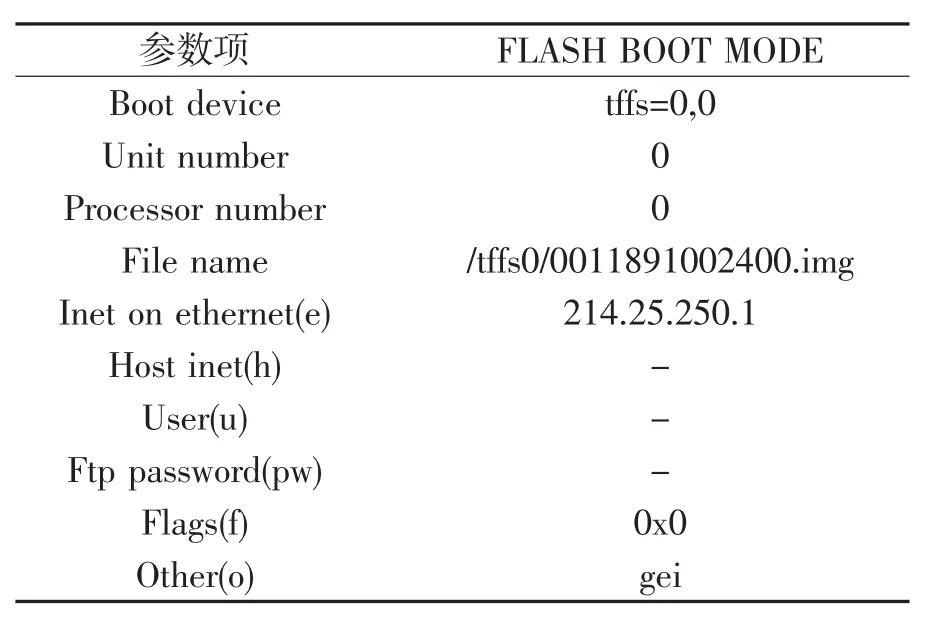
表2 SW boot 参数配置表
INDRA 雷达实际加载SW boot 参数的界面及详细显示情况如图4 所示。
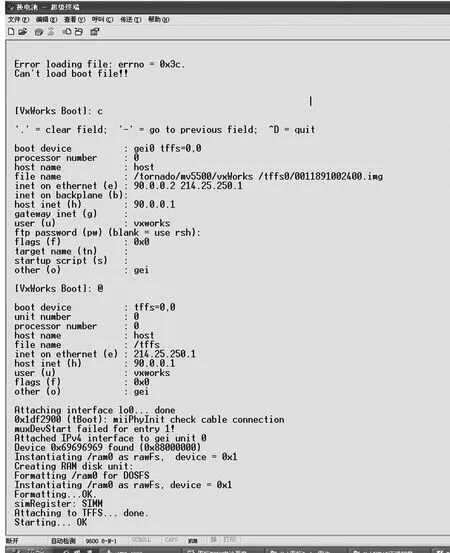
图4 SW boot 实际加载图
参数加载完成后,输入@,按Enter 键,检查Vx Works 参数开始刷新,进而最终完成整个TCPU 板程序加载。
4 结 束 语
INDRA 雷达中MCPU 板接收并处理从接收机送来的视频信号,检测SSR 与S 模式应答,生成所有目标的点迹信息并送至ATC 与雷达维护显示器。TCPU 板作为雷达数据处理部分的重要组成部分之一,掌握其重要程序加载方法,无疑将为IRS-20MP/L 型雷达的维护提供重要的参考经验,同时,该项技术的实际运用也将填补中部地区INDRA 雷达在该领域的空白,对同行业相关技术人员具有十分重要的参考价值。
猜你喜欢
科学技术创新(2024年3期)2024-02-22 09:48:16
测控技术(2018年6期)2018-11-25 09:50:18
电子制作(2018年19期)2018-11-14 02:36:40
电子制作(2018年9期)2018-08-04 03:31:04
电子制作(2018年12期)2018-08-01 00:48:02
四川电力技术(2017年1期)2017-03-16 08:13:04
电子制作(2016年1期)2016-11-07 08:42:41
系统工程与电子技术(2016年4期)2016-08-24 07:46:04
西部广播电视(2015年9期)2016-01-18 03:46:07
西部广播电视(2015年3期)2016-01-15 02:05:45