优化自适应卡尔曼滤波跟踪方法研究
2019-12-23 10:37:08朱宏康
中国电子科学研究院学报 2019年9期
郭 丽,刘 磊,朱宏康
(1.中原工学院,郑州 450007;2. 郑州航空工业管理学院,郑州 450015;3.北京工业大学,北京 100124)
0 引 言
随着光电技术的快速发展,目前光电跟踪技术广泛的应用在目标跟瞄和光电测控等领域[1-9].从国内外的研究现状看,其核心主要是跟踪的精度和执行效率,也就是跟踪的实时性问题,目前的研究多数都是基于位置跟踪增益的优化来实现系统的精确跟踪,这类方法要求系统的先验信息精确已知[10-11]。但是,在动态时变情况下,由于观测噪声的引入导致信号干扰增强、跟踪精度变差。随着光电技术在各个领域的快速应用和推广,目前对光电跟踪精度的需求大幅提升、跟踪条件日益苛刻,因此,传统的方法很难满足现代光电跟踪系统对精度的要求[12]。为解决这种问题,研究人员创新性的提出了光电系统复合跟踪的概念,通过消除速度和加速度滞后误差的方法,实现稳定跟踪下的精度大幅度提升[13-14],成为当前提升光电系统跟踪性能的主要方法之一。复合跟踪方法要求能够获取目标的角速度值,实现前馈和反馈环路的复合跟踪效能[15],目前常用的复合跟踪方法主要是利用测速观测和编码的方法对角度信息进行后续的解算,使得提升精度受限[16]。而且,由于光电跟踪系统的极坐标与笛卡尔坐标转换存在明显的非线性问题,且参数存在明显的未知、时变特性。文献[17]提出基于贝叶斯滤波的方法对模型的参数进行实时的在线估计,为解决目标运动过程中参量和模型失配问题提供了一种有效思路。
针对光电系统复合跟踪实现问题,本文研究了一种基于模型自适应修正的卡尔曼滤波复合跟踪方法。该方法利用当前统计模型联合参量的自适应估计,观测信息噪声干扰情况下的精确跟踪。首先,通过预先处理和分析观测数据,剔除野值干扰影响,合成需求的目标位置信息;同时,构建目标信息的自适应预测和估计,通过反馈的角速度估计值实现系统的前馈和反馈复合跟踪。最后,基于建立的系统进行了详细的仿真实验分析。
1 复合跟踪构架原理
传统的光电跟踪系统主要包括位置和速度两个参量[18],多数采用图1所示的原理跟踪框图,由于无法直接反馈目标的位置信息,普遍采用目标脱靶信息简介获取,但是仍然缺少空间的位置信息,尤其是角度空间信息的确实,导致角速度和角加速度无法获取,无法实现复合跟踪。

图1 传统伺服跟踪系统结构原理框图
现有的研究主要针对脱靶的观测数据和仪器相关信息进行位置数据的获取和分析,并在考虑观测信息延时的基础上进行了时间对准分析,最后基于贝叶斯状态滤波估计的方法进行角速度信息的预测和估计,最后,将估计的角速度信息反馈到复合跟踪系统,实现的复合跟踪原理如图2所示。
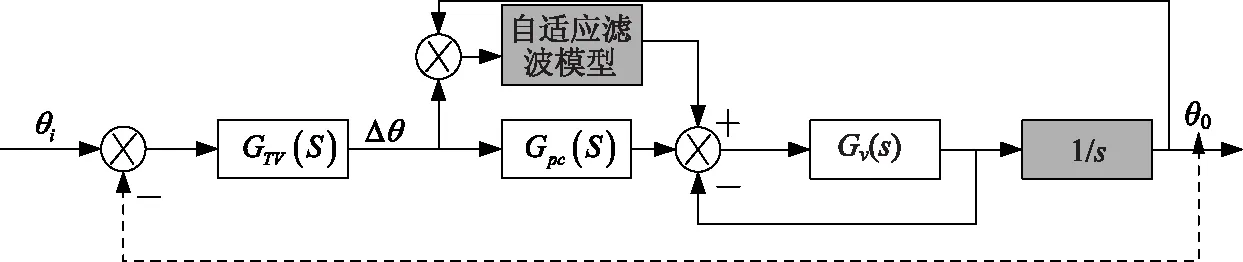
图2 本文提出的复合跟踪系统结构框图
2 自适应修正卡尔曼滤波原理
考虑在实际应用系统中由于运动目标的未知与时变特性,同时观测信息极坐标与笛卡尔坐标的转换导致系统具有较强的非线性和信息的不完备性等问题。为了解决这些应用难题,本文从模型的构建和模型参数的选择两个方面对系统进行优化。采用当前统计模型构建光电观测目标运动特性,同时,采用观测残差信息对目标的参量进行自适应修正。
2.1 当前统计模型
当前统计模型是机动目标跟踪领域应用较多的模型,其基本思想主要是认为目标在时间上具有较高的一致性,参量的变化保持在当前模型参量的有限邻域范围内[20-21],因此,可以将目标的加速度参量a(t)表示为零均值的一阶模型

(1)
“新的“两委”班子成员到位以后,我们作为前任领导,从工作上从思想上多方面地给予帮助,年轻人学习也快,进入角色转变角色都非常快,现在都能正常地开展工作了。”一〇四团西城西社区原负责人刘军欣慰地说。□
(2)

(3)
2.2 模型参数的组成及调整过程


(4)
(5)
由于目标的状态转移矩阵Φk|k-1和过程噪声方差矩阵Qk同模型参量相关[23],因此,可以考虑建立残差序列实际统计特性与Pk|k-1的关系对运动模型参数进行实时调整,具体的构建过程可以表示为
(6)
(7)
(8)
(9)

αk=λkα
(10)
同时,可以将加速度均值表示为当前时刻加速度的预测值,即
(11)
并将加速度极值表示为均值的比例形式,即
(12)
式(12)中,c为比例系数,在状态弱变化的情况下通常取值较小的经验值,当状态变化较大的时候,采用时变调节的方法
ck=λkc
(13)
其中,λk为状态突变情况下系数调节因子。
2.3 模型的自适应优化

(14)
Pk|k-1=Φk|k-1Pk-1|k-1ΦTk|k-1+Qk
(15)
(2)残差计算。本文参考文献[24]的研究,本文将残差序列和系数调节因子计算为
(16)
(17)

αk=λkα
(18)
ck=λkc
(19)
(20)

(21)
(22)
(23)
(5)观测更新。

(24)
(25)

(26)
为便于理解本文提出的自适应修正实现原理,图3给出了本文的具体实现框图,其中,模型及更新和观测及更新为传统标准光电跟踪系统的模型,虚线框标注的利用残差检测、模型修正、时间更新和预测四个步骤进行模型参数调整过程为本文的创新点所在。通过残差检测对观测模型进行实时的修正,保证了最新观测有用信息的保留,并最大化的消除了历史干扰信息。
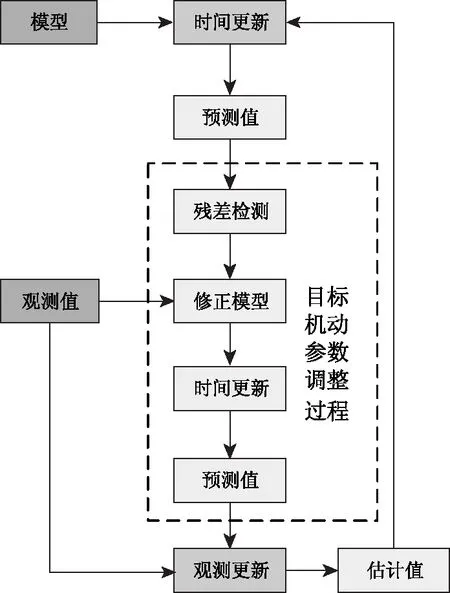
图3 提出的自适应修正原理框图
3 仿真实验与结果分析
为验证本文方法在模型构建不精确情况下的具体跟踪效果,采用式(27)模型进行复合跟踪分析。实验中分别采用二阶常速运动模型(CV)和三阶常加速(CA)线性运动模型混合构建目标的运动状态,并采用本文方法进行理论上的自适应建模,取目标的运动参数(位置、速度、加速度)作为系统的状态变量,且系统噪声假设为互不相关的高斯白噪声。为模拟分析跟踪系统的非线性特性,仿真中构建的极坐标模式的离散系统模型如式(27)所示[25]
(27)

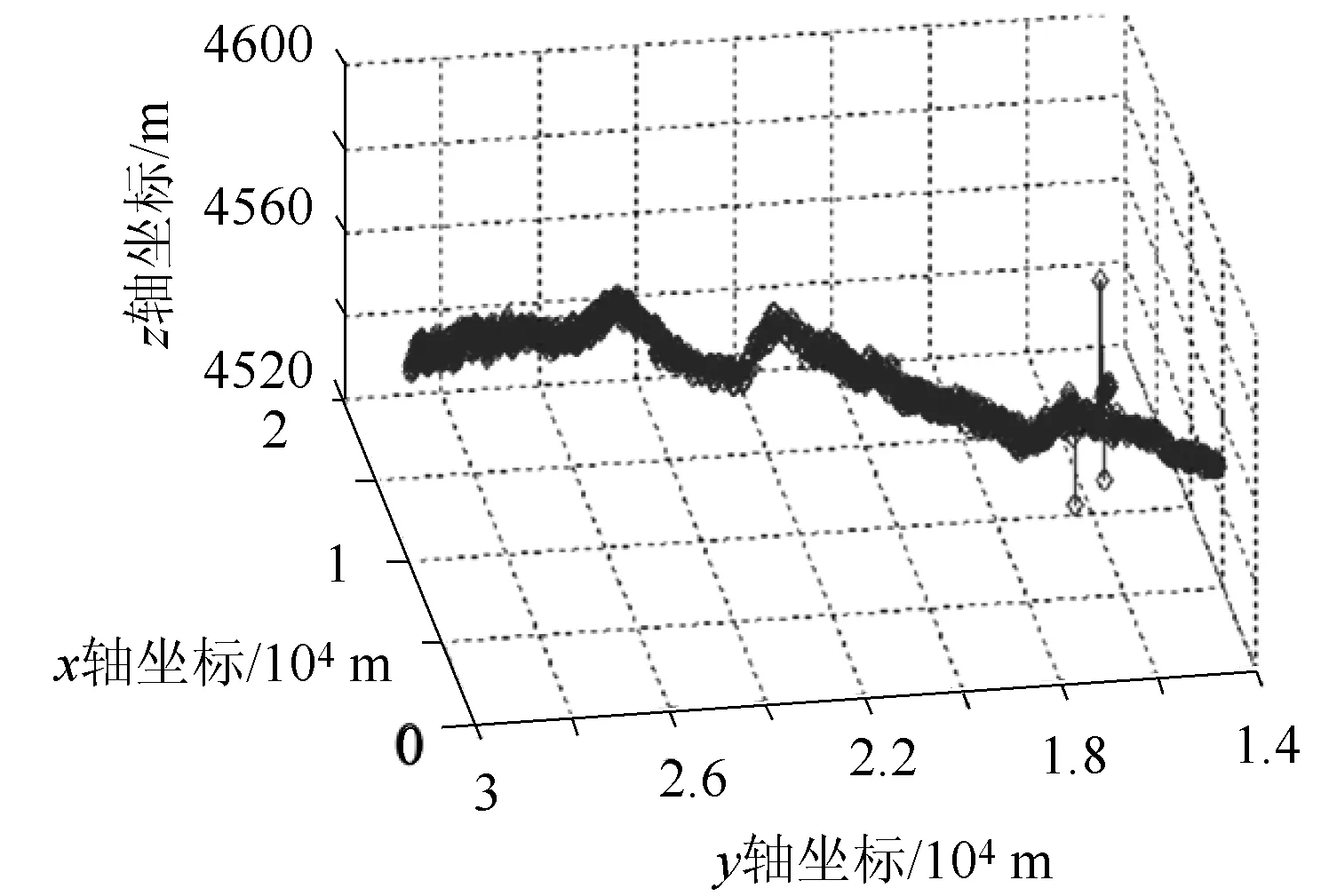
图4 目标运动轨迹
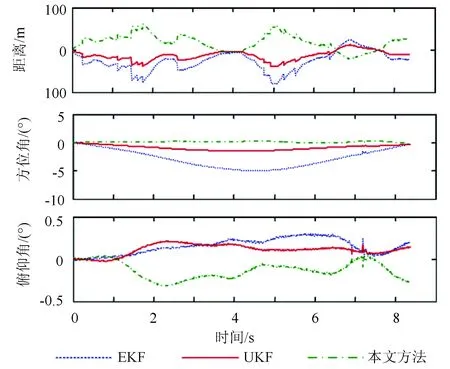
图5 不同方法的跟踪误差曲线
图4定量的说明了本文方法在光电非线性系统跟踪中保持了较高的跟踪精度,为进一步说明本文方法的稳定性和可靠性,对实验内容进行了随机的重复处理,分别进行40次重复实验,并计算均值,具体结果如表1所示。
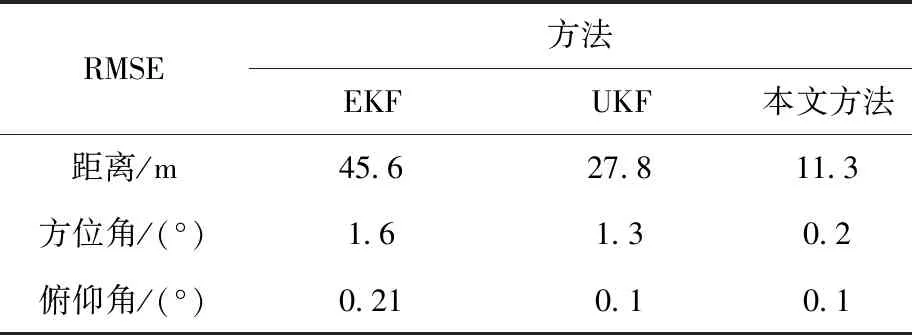
表1 不同方法的跟踪性能比较
从表1中可以看出,本文方法保持了较高的跟踪精度和稳定性,同传统模型参量不修正的方法相比,整体跟踪精度得到了很大的提升,其中距离跟踪精度较EKF提升了75.2%,较UKF提升了54.4%。
4 结 语
观测噪声干扰情况下精确鲁棒的光电系统复合跟踪技术属于光电目标跟踪领域的重点研究内容之一。本文主要针对观测噪声干扰情况下光电系统的精确跟踪问题展开研究,在考虑模型误差的基础上提出了一种基于模型自适应修正的复合跟踪方法。同传统的跟踪方法相比,本文方法主要有两点创新:
(1)提出了一种野值剔除方法,并构建了信息残差序列和模型参量之间的自适应修正关系;
(2)实现了角速度的实时估计,并基于估计的角速度构建了反馈和前馈结合的复合跟踪方案,并通过仿真进行了实验分析。
最后的实验分析验证了本文方法的可行性和优越性,能够在保持系统跟踪稳定的同时实现了精度40%的提升。后续的研究中,拟基于FPGA+DSP的方案对该跟踪方案进行实验测试和分析。
猜你喜欢
网络安全与数据管理(2022年3期)2022-05-23 13:26:48
Journal of Palaeogeography(2022年1期)2022-03-25 04:17:00
快乐语文(2021年35期)2022-01-18 06:05:30
北京航空航天大学学报(2020年10期)2020-11-14 09:26:02
法律方法(2019年4期)2019-11-16 01:07:28
自动化学报(2019年6期)2019-07-23 01:18:32
摄影之友(影像视觉)(2017年1期)2017-07-18 11:12:16
河南科技(2015年8期)2015-03-11 16:23:52
物理实验(2015年9期)2015-02-28 17:36:51
数学年刊A辑(中文版)(2014年4期)2014-10-30 01:50:32