
一种适用于高动态强干扰环境的视觉辅助微机械捷联惯性导航系统/全球定位系统超紧组合导航系统
2019-12-23 05:25:06李群生赵剡王进达
兵工学报 2019年11期
李群生, 赵剡, 王进达
(1.北京航空航天大学 仪器科学与光电工程学院, 北京 100191; 2.中国空空导弹研究院, 河南 洛阳 471009)
0 引言
使用低成本微机械(MEMS)传感器的捷联惯性导航系统(SINS)/与全球定位系统(GPS)超紧组合导航系统并不能解决在恶劣GPS环境下的信号跟踪问题。而视觉传感器输出的误差不会随时间积累,基于互补金属氧化物半导体(CMOS)的数字成像技术作为一种被动观测方法具有良好的隐蔽性,且景物视觉特征不易受到人为干扰。因此,视觉成为辅助MEMS-SINS/GPS超紧组合系统的理想选择。
国外对视觉辅助的SINS/GPS组合导航技术已经开展了一些研究。早期视觉导航解决方案是面向自主地面机器人研发的。近年来,视觉导航系统在无人飞行器(UAV)、深空探测器和水下机器人领域得到广泛应用,并进一步刺激了基于视觉的组合导航算法研究[1-2]。欧美等发达国家较早地开展了视觉提取导航信息的技术研究。美国加州大学伯克力分校[3]将视觉导航应用到无人直升机自主着陆中,并给出了实际的飞行实验结果;飞行实验结果表明该视觉导航系统可以使无人直升机着陆的轴向定位精度达到5 cm. 佛罗里达大学[4]研究了一套通过图像获得飞行器滚转角和俯仰角的方法。上述研究都是以视觉导航信息为主,并未涉及多传感器的信息融合,然而这些图像处理、视觉信息提取方面的研究是值得借鉴的。在使用视觉辅助SINS/GPS组合导航方面,Wu等[5]采用标准扩展卡尔曼滤波算法将图像中得到的无人机相对于目标距离和方向与GPS和惯性导航系统(INS)融合,得到了较高精度的导航结果。Barreau等[6]对视觉辅助下的INS状态模型和量测模型进行了细致分析,研究了视觉/INS辅助的基于卡尔曼滤波器的全球卫星导航系统(GNSS)信号跟踪方法。Benoit等[7]在之前的基础上进一步开展了视觉辅助的GNSS/INS超紧组合系统的性能评价工作,使用一个单目相机,通过匹配地标点获取载体位置信息,对惯性测量单元(IMU)的误差进行标定。仿真结果表明,使用视觉辅助可以有效地抑制惯性元件参数的漂移,将定位精度从几百米降低到10 m左右。
国内对这方面的研究相对较少。李荣冰等[8]提出利用视觉/GPS/MEMS-SINS组合导航系统确定微型飞行器姿态的方案,增加视觉姿态后,滤波器中INS平台误差角的可观测性得到了增强,姿态估计精度也得到了提高。李旭等[9]提出INS/GPS/视觉/电子地图融合组合方式,该组合导航系统能为智能车辆提供其空间位置、速度、加速度与姿态角等众多导航信息,并且当GPS较长时间中断时,通过SINS/视觉/数字地图的组合仍然能够为智能车辆提供可靠的导航数据。姬张建等[10]研究了差分全球定位系统(DGPS)/INS/视觉组合导航算法,采用INS精度相对较高,GPS采用DGPS,并使用了实现预知的电子地图加以辅助,取得了良好的导航效果。邵玮等[11]提出了基于视觉/GPS/MEMS-SINS的微小型无人机(MUAV)数据融合导航方案,采用位置与速度组合方式,仿真验证结果表明该组合导航方案具有较高的导航精度,能够保证导航系统的稳定性。宋琳娜等[12]研究了利用计算机视觉和SINS进行组合导航的算法,实现了视觉导航图像信息与SINS的信息融合。文献[13] 提出了一种基于对偶4元数的惯性/卫星/天文组合导航系统改进联邦滤波方法,通过可观测性分析对子滤波器进行降维,能在保证导航精度的同时提高系统实时性。文献[14]针对接收机在强干扰高动态环境难以定位导航的问题,提出基于惯性导航速度辅助卫星跟踪环路算法。文献[15]提出一种高动态情况下INS/视觉组合导航中视觉系统的快速定位方法。文献[16]提出高动态和强干扰环境下新型超紧组合GPS/INS导航算法。文献[17]系统研究了基于矢量跟踪的高动态载体超紧组合导航技术。
综合以上研究可以看出,目前视觉辅助下的导航技术较为单一[18-20],并且没有涉及SINS/GPS超紧组合,针对高动态、强干扰以及恶劣GPS环境的容错性并不强。因此,本文提出一种适用于高动态强干扰环境的视觉辅助MEMS-SINS/GPS超紧组合导航系统,通过将双目视觉提供的姿态信息引入MEMS-SINS/GPS超紧组合系统中,提高了平台失准角的可观测性。推导了系统状态方程和量测方程,提高了系统在高动态强干扰环境中的可靠性,有效解决了低空飞行器在GPS信号被遮挡或干扰情况下的导航问题。
1 系统设计
1.1 视觉导航原理和时空对准
视觉导航和空间对准方法详见文献[21],文献[22]给出了低动态、中动态和高动态情况下的硬件或软件同步方法。本文采用的时间对准采用文献[23]的方法。
1.2 系统状态方程
由于双目视觉导航信息以位置和姿态的形式输出到信息融合模块,为了便于系统建模和提高滤波效率,采用传统超紧组合系统的状态方程作为视觉辅助GPS/SINS超紧组合系统的状态方程。
坐标系定义如下:i为地心惯性系,t为当地地理坐标系,e为地心地固坐标系,p为惯性导航平台坐标系,b为载体坐标系,c为大地坐标系。
视觉辅助GPS/SINS超紧组合系统的状态方程为

(1)

1.3 系统观测方程
将SINS和GPS的伪距、伪距率之差、SINS的平台失准角、SINS与视觉的位置和速度误差作为视觉辅助GPS/SINS超紧组合系统的观测量。
1.3.1 伪距观测方程
伪距观测方程为
Zρ=HρX+Vρ,
(2)
式中:Zρ为伪距观测量;Hρ为观测矩阵;X为系统状态变量;Vρ为观测噪声;
ρI为惯性导航计算的伪距,ρG为接收机测量的伪距,Li(i=1,2,3,4)为第i颗卫星的方向余弦矢量,R为地球半径,h为海拔高,λ为纬度,L为经度。
1.3.2 伪距率观测方程
伪距率观测方程为
(3)


1.3.3 平台失准角观测方程

(4)
式中:φx、φy、φz分别为平台失准角的3个分量。利用(4)式将姿态误差角转换为平台失准角误差,并将平台失准角误差作为观测值,可以得到:
1)平台失准角误差的观测方程为
Za=HaX+Va,
(5)

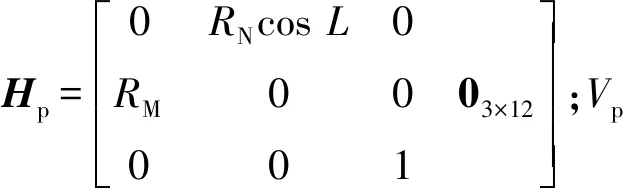
2)位置观测方程为
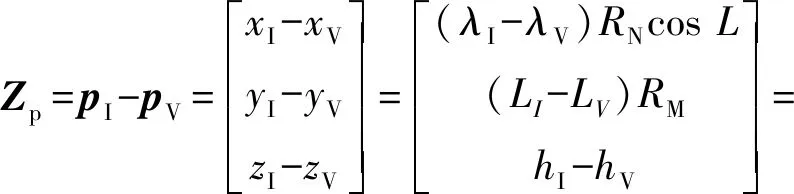
(6)
3)速度观测方程为
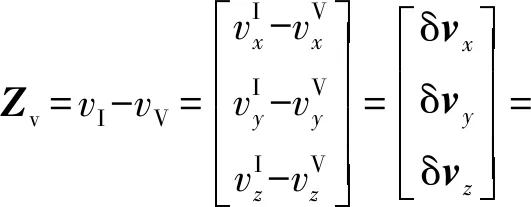
(7)
1.4 信息融合方案
如图1所示为组合导航系统的信息融合方式,系统采用级联滤波结构,其中aV为视觉系统得到的加速度。图1中:S1为控制开关;子滤波器1为双目视觉辅助GPS/SINS超紧组合卡尔曼滤波器;子滤波器2为双目视觉与SINS的组合导航滤波器;主导航估计器采用模糊控制算法,与传统联邦滤波相比,不需要进行大量矩阵求逆计算,计算量大大降低,更适合在弹载计算机上实时计算。
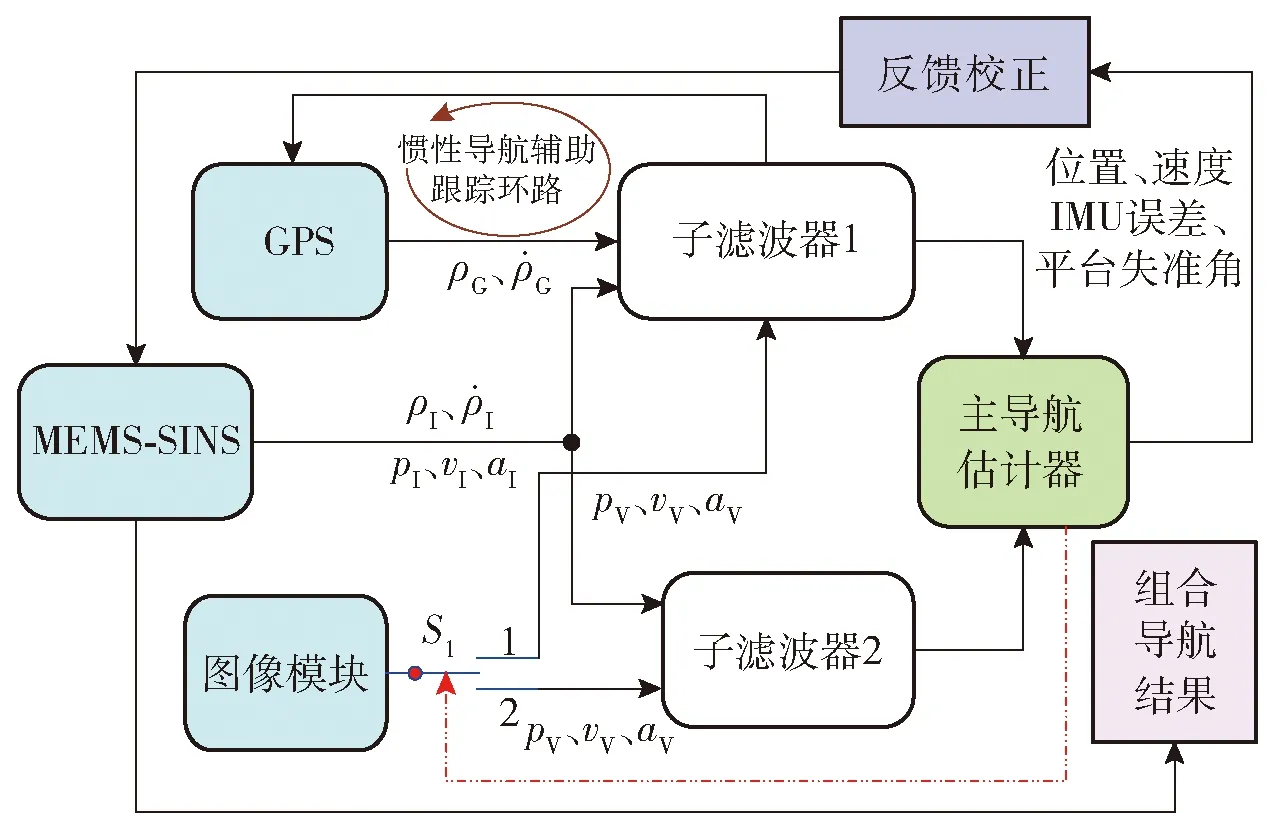
图1 组合导航系统信息融合结构图Fig.1 Information fusion architecture of integrated navigation system
由于各个子系统的输出频率不同,在进行信息融合时需要进行时序对准。MEMS-SINS系统的更新频率为1 kHz,GPS信息输出频率为100 Hz,而视觉模块的量测信息输出频率为10 Hz. 子滤波器1和子滤波器2的状态方程相同,而观测方程不同,因此其观测信息的更新周期不同。
对于子滤波器1,既有来自GPS的观测信息,也有来自惯性导航的信息。对于整10 ms且非整100 ms的时刻,系统观测方程与超紧组合系统相同,即
(8)

而对于整10 ms且整100 ms的时刻,系统量测量既有GPS信息也有视觉信息,观测方程为
Z1=H1X+V1,
(9)
式中:ZG为来自GPS的观测量。
当GPS信号中断时,系统转换为以子滤波器2进行滤波,其观测方程为
Z2=H2X+V2,
(10)

主导航估计器利用模糊控制方法融合两个子滤波器的导航结果,并根据观测信息判断能否正常跟踪GPS,进而通过控制开关S1选择使用哪个子滤波器进行滤波。
设置的锁相环(PLL)锁定检测器用来检测载波相位的跟踪状态,该检测器输出值LD是载波相位跟踪误差的函数,可表示为
(11)
(12)
X=μX1+(1-μ)X2.
(13)
式中:X1和X2分别为子滤波器1和子滤波器2的输出;根据经验,Tdl取0.6,Tdu取0.7.由于系统选择的状态量为系统的各项误差,不能直接输出。因此,估计出状态量后需要对导航信息进行校正。通常的校正方式有输出校正和反馈校正。输出校正利用误差估计值修正系统导航输出,易于实现但精度不高;反馈校正在惯性导航系统解算过程中进行,能够获得较高的精度,但当估计结果不准确时会导致滤波发散,系统可靠性不足。
对于状态量采用哪种方式进行反馈,取决于此状态的可观测性。对于可观测状态量,采用反馈校正可以获得更高的精度;对于不可观测状态量,采用反馈校正会导致系统的发散。对于无视觉辅助的GPS/SINS超紧组合系统,由于其状态量中的平台失准角是无法观测的,不能利用反馈校正修正姿态误差。本文提出的基于视觉辅助的超紧组合系统方案,在观测量中引入了姿态信息,使平台失准角可观测,此时采用反馈校正方法可以使姿态估计精度大大提高。
2 仿真实验与分析
2.1 仿真条件
以地理坐标系作为导航坐标系,采用MEMS惯性器件作为惯性导航元件。惯性器件误差如下:陀螺漂移为15°/h,其标度因子误差为3 000×10-6;加速度计漂移为1×10-3g,其标度因子误差为1 000×10-6;陀螺和加速度计的白噪声均方差分别为0.04°/h和0.001×10-3g;GPS导航定位在GPS软件接收机的基础上实现。在视觉辅助SINS/GPS超紧组合系统中,导航系统切换到组合导航模式之前,各个子系统各自独立工作,GPS的捕获和初始跟踪都在此阶段完成。GPS接收机模块中,采样频率为38.162 MHz,预检测时间为1 ms,采样后信号中频为9.548 MHz,跟踪环路中包括载波跟踪环路和码跟踪环路两部分。当GPS单独工作时,载波环为2阶环路,其噪声带宽为20 Hz,阻尼因子为0.707,码环为2阶延迟锁定环,噪声带宽为3 Hz,载波环和码环的增益分别为0.25和1. 当处于组合导航模式时,载波环路带宽降为8 Hz,码环带宽降为0.5 Hz. 视觉系统采用双目立体摄像机,安装在载体的正下方,双目摄像机的基线距为4 m,两摄像机光轴方向平行且垂直向下;摄像机分辨率为1 024像素×1 024像素;图像中特征点提取存在0.001像素的误差。INS的信号输出频率为1 000 Hz,视觉导航系统的信号输出频率为10 Hz,组合导航系统数据的输出频率为100 Hz. 仿真运动的最大速度马赫数为3,加速度设置为40g.
2.2 性能分析
仿真时间为200 s,图2、图3、图4分别为SINS、无视觉组合与视觉辅助组合的姿态估计误差对比结果。
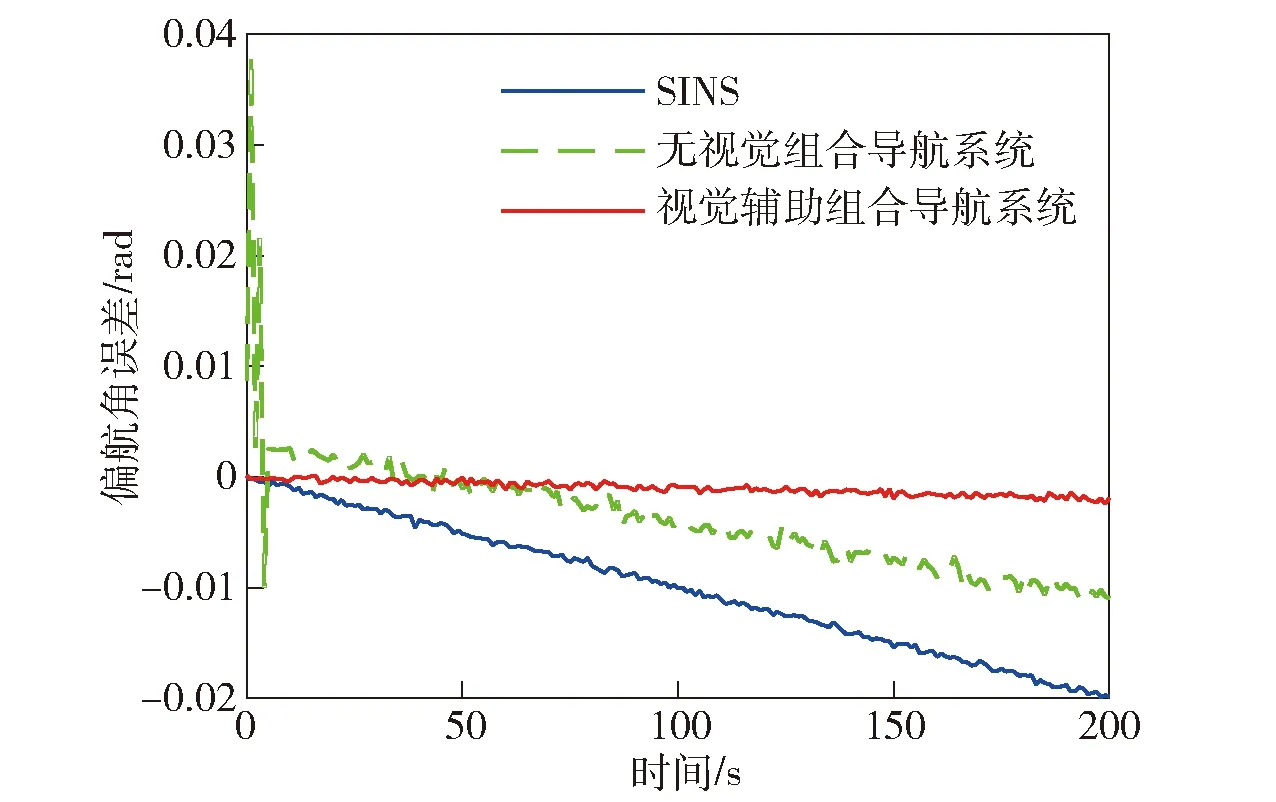
图2 偏航角误差对比Fig.2 Comparison of yaw angle errors
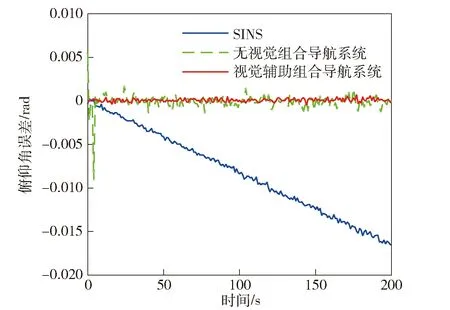
图3 俯仰角误差对比Fig.3 Comparison of pitch angle errors
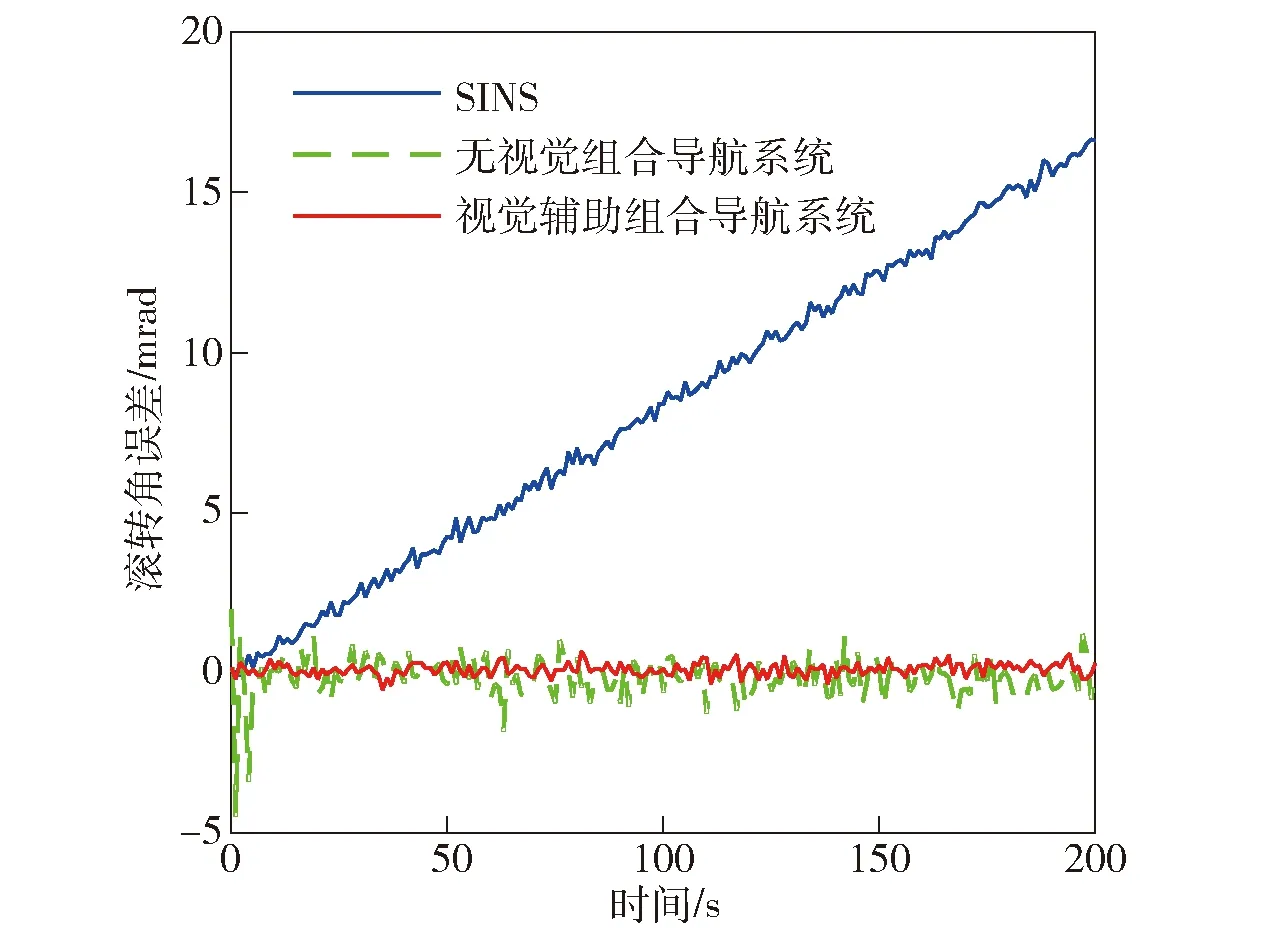
图4 滚转角误差对比Fig.4 Comparison of roll angle errors
从图2~图4可以看出:有视觉辅助的组合导航系统,其姿态角误差有明显下降;而无视觉组合系统姿态误差与SINS姿态误差基本相同。这是因为视觉姿态信息的引入,增加了平台误差角可观测性,提高了系统姿态估计精度。因此,视觉辅助GPS/MEMS-SINS组合系统改善了无视觉组合系统姿态误差估计精度不高的缺点。
为了验证视觉辅助的效果,在整个200 s仿真过程中,50~150 s期间GPS信号中断,当GPS信号存在时,系统处于无视觉组合模式下。当GPS信号中断时,一种方式是引入视觉信息,校正MEMS-SINS的误差,系统处于视觉/SINS组合模式,而另一种方式是只利用MEMS-SINS进行导航。图7~图10分别为超紧组合系统在引入视觉辅助与没有视觉辅助情况下的导航结果对比图。
由图5~图8可以看出,无视觉组合系统可以很好地估计导航结果,位置误差在1 m以内,速度误差在0.1 m/s以内。当GPS信号中断时,如果没有引入视觉信息,则系统进入纯惯性导航模式,由于本文中采用性能比较差的MEMS惯性导航系统,误差发散速度很快,在100 s时间内,北向位置误差达到350 m,北向速度误差达到8.5 m/s. 当引入双目视觉导航系统对超紧组合系统进行校正后,位置速度误差保持在5 m以内,导航精度大大提高。而且在GPS信号恢复后,无视觉辅助的超紧组合系统导航误差明显比有视觉辅助时误差大,收敛速度慢。
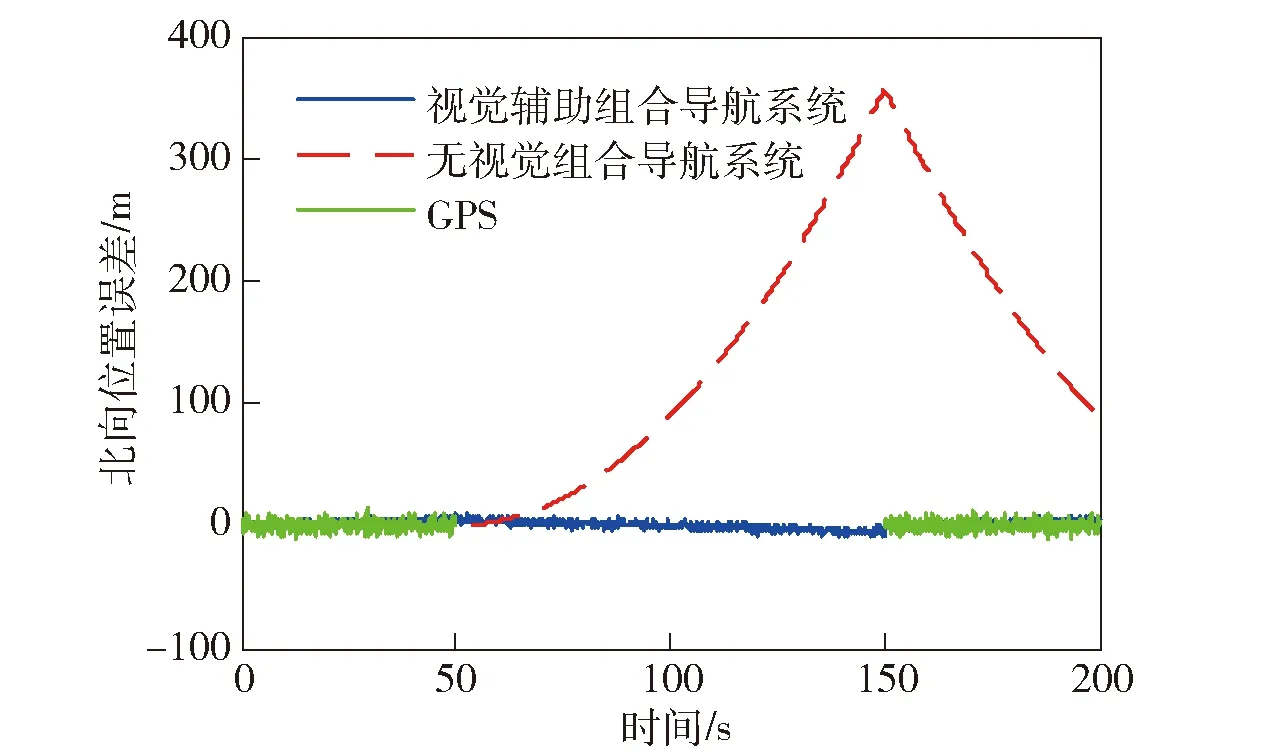
图6 北向位置误差Fig.6 Position errors in the north direction
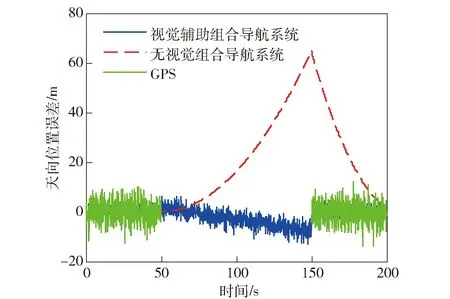
图7 天向位置误差Fig.7 Position errors in the zenith direction
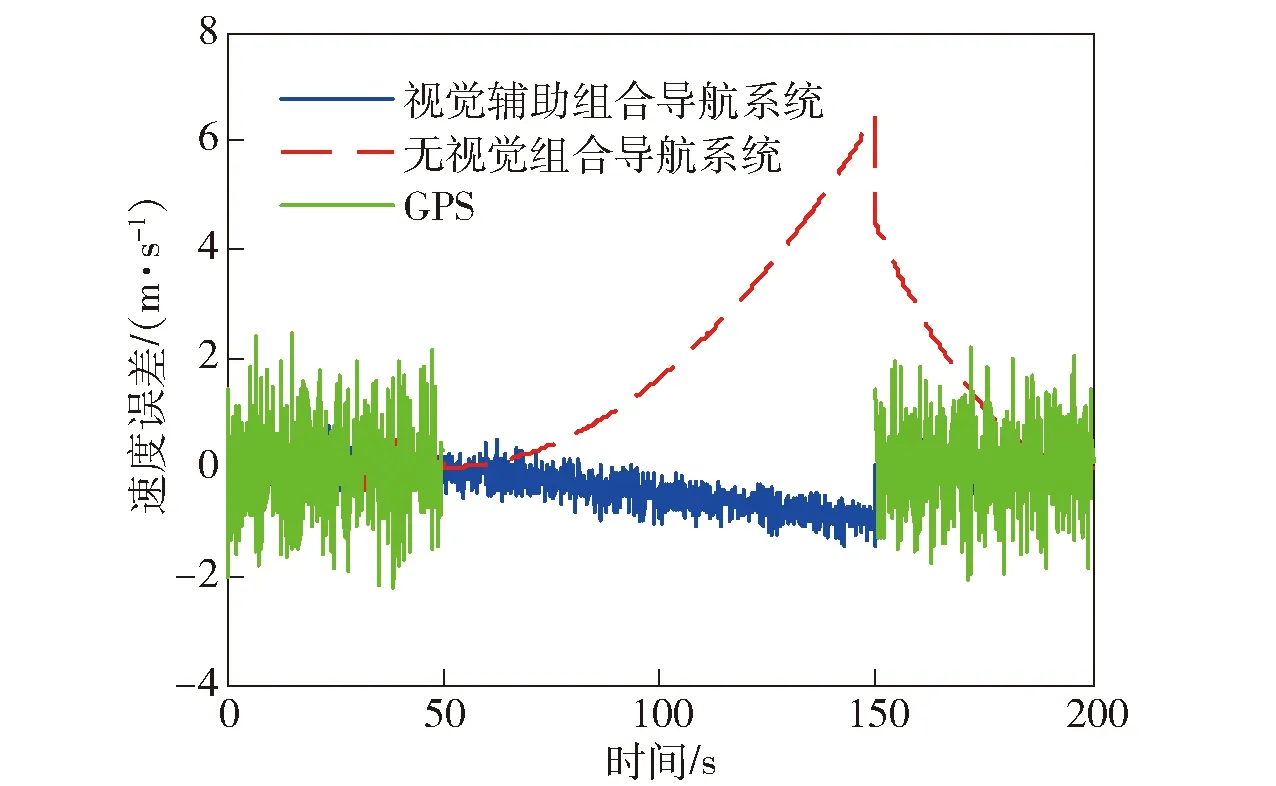
图8 速度误差Fig.8 Velocity errors
在仿真过程中,在50~150 s期间,GPS信号受到强干扰影响,信号载噪比降低到4 dB-Hz,150 s后噪声消失,载噪比恢复正常。
当GPS接收机信号受到强干扰时,GPS与SINS超紧组合系统的导航性能会受到影响,利用视觉辅助GPS/SINS超紧组合系统,可以提高系统的可靠性和导航精度。
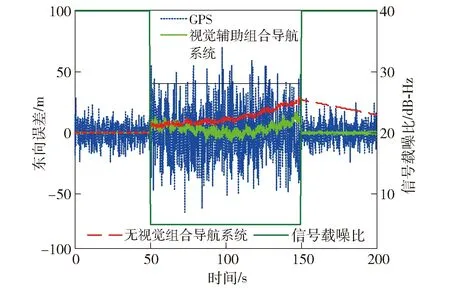
图9 东向位置误差Fig.9 Position errors in the east direction
图9~图12为受干扰仿真条件下,分别采用无视觉组合导航与视觉辅助组合导航方式下的位置、速度导航误差结果。由图9~图12可以看出,经视觉辅助后的GPS/SINS超紧组合系统在受到强干扰时,位置和速度误差比无图像辅助的小,并且在干扰消失后导航误差收敛更快。
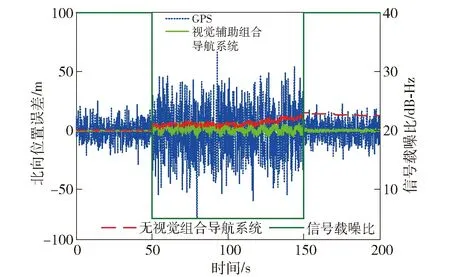
图10 北向位置误差Fig.10 Position errors in the north direction
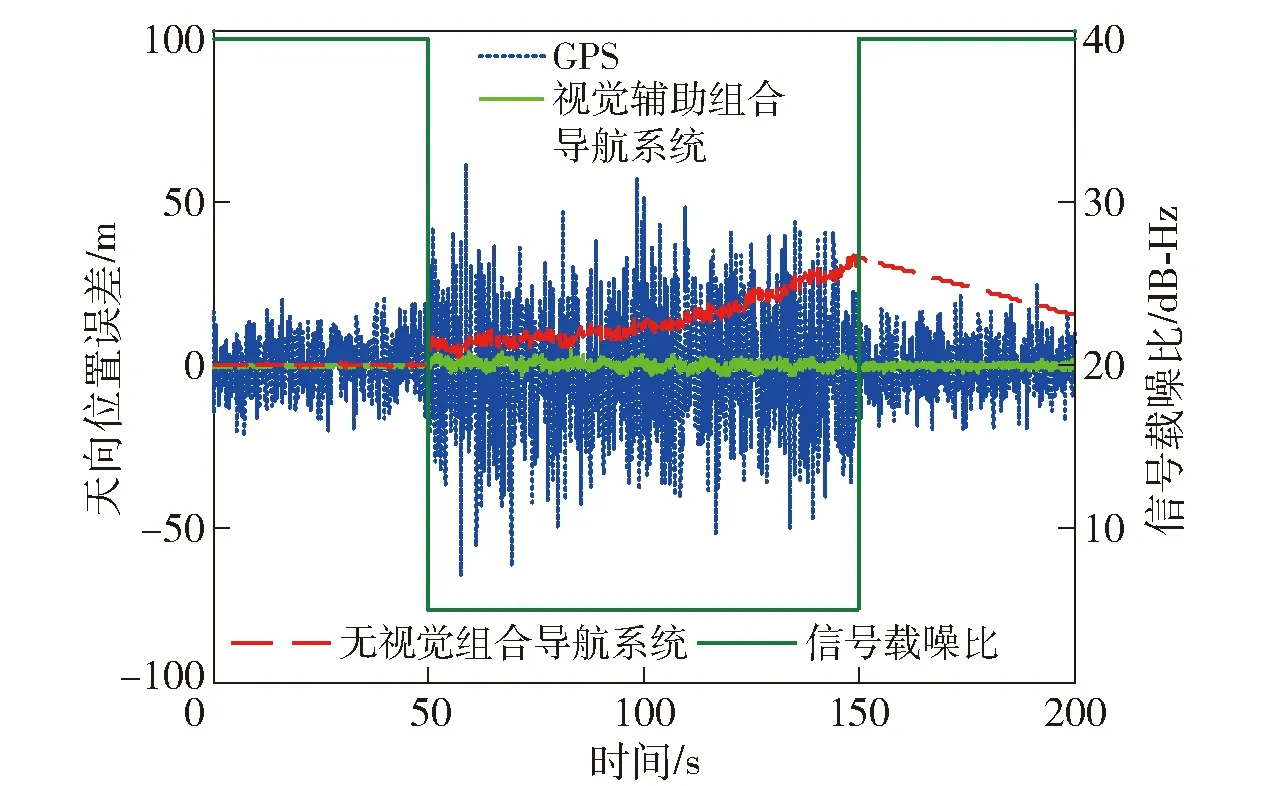
图11 天向位置误差Fig.11 Position errors in the zenith direction

图12 速度误差Fig.12 Velocity errors
3 结论
本文设计并验证了一种双目视觉辅助MEMS-SINS/GPS超紧组合系统方案,对系统仿真结果进行了分析。得到主要如下结论:
1)通过将双目视觉提供的姿态信息引入MEMS-SINS/GPS超紧组合系统中,提高了平台失准角的可观测性,大大降低了超紧组合系统的姿态误差,进而提高了系统导航精度。
2)当GPS信号中断时,利用双目视觉导航信息校正MEMS-SINS的导航误差,很大程度上抑制了INS的发散,提高了位置、速度的导航精度。
3)当GPS信号受到强噪声或多径干扰造成跟踪精度下降时,双目视觉辅助GPS/MEMS-SINS超紧组合系统可以有效降低导航误差,提高组合系统的导航精度,从而提高系统在高动态强干扰环境中的可靠性。
4)设计了一种模糊控制方法融合两个子滤波器的导航结果,计算量大大降低,适合在弹载计算机上实时计算。
这种新型超紧组合结构通过引入双目视觉信息辅助超紧组合导航系统,有效地解决了低空飞行器在GPS信号被遮挡或干扰情况下的导航问题。
猜你喜欢
中学生数理化·八年级物理人教版(2020年11期)2020-12-14 06:58:24
学生天地(2020年3期)2020-08-25 09:04:16
电子制作(2019年11期)2019-07-04 00:34:38
汽车观察(2018年9期)2018-10-23 05:46:40
中国自行车(2018年8期)2018-09-26 06:53:44
电子制作(2018年16期)2018-09-26 03:26:50
中学生数理化·八年级物理人教版(2018年4期)2018-06-27 08:08:02
中国惯性技术学报(2017年1期)2017-06-09 08:15:14
百科探秘·航空航天(2016年9期)2016-12-01 03:04:14
系统工程与电子技术(2016年7期)2016-08-21 13:59:02
