果园对靶喷药控制系统的设计及试验
2019-12-22 05:43范鹏飞
农机化研究 2019年2期
邹 伟,王 秀,高 斌,范鹏飞,苏 帅
(1.北京农业智能装备技术研究中心,北京 100097;2.国家农业智能装备工程技术研究中心,北京 100097;3.农业部农业信息技术重点实验室,北京 100097;4.农业智能装备技术北京市重点实验室,北京100097)
0 引言
精细农业果园生产管理中,单棵果树是最小的作业单元, 果树的位置和树冠大小是果树施肥、灌溉和果树病虫害防治中确定投入量多少的重要依据[1-3]。无靶标喷施造成的靶标以外大量农药沉积是果园农药残留的主要原因之一,对靶喷药技术是降低农药残留的有效手段,其关键技术是靶标探测技术[4-7]。
对靶喷药可以有效节省农药。翟长远等设计了一种幼树靶标探测器,通过红外传感器探测喷药机两侧果树树干的位置,根据内部算法计算出靶标喷雾位置,从而控制开闭喷头电磁阀,以实行对靶喷药[8]。在实际的果园中,大多数果树的树干是很难检测的。例如,如橘树与桃树的枝叶繁茂,树冠很低,红外传感器几乎无法探测树干。在标准化果园中,果树四周还有栅栏,传感器实际上是在探测果树的树枝或栏杆,没有实际探测到树干,控制器误以为这是树干,将以这一探测点为中心,实行喷药作业,导致单片机计算的喷药范围错误。另外,该喷药机只是控制电磁阀开闭,无法做到变量喷药。实现变量喷药控制技术,其核心是根据喷药实施环境的变化实时控制喷药量;但传统变量喷药控制技术是根据调节系统压力实现变量控制[9],实际喷药作业中压力很难实现精确、快速调节。刘大印等人设计了基于单片机PWM 变量农药喷洒控制系统。采用脉宽调制技术来控制喷药流量,但是喷药变量范围比较小[10-11]。
针对这些问题,本文设计了一种基于树冠探测的对靶控制系统。该控制系统通过红外传感器列阵探测树冠位置及树冠的宽度,结合拖拉机运行速度计算喷洒范围,控制多路电磁阀的开闭以进行对靶喷药,在没有果树的地方停止喷药;采用PWM驱动方法,改变喷头的喷药流量,实现变量作业;传感器固定架采用多孔设计,便于调整红外传感器的上下分布间距,以适应不同要求。喷头可以通过旋转调节喷药范围。
1 系统设计
1.1 喷药机构成
喷药机主要由机械部分及喷药控制系统组成,如图1所示。

图1 系统结构图
图1中,机械部分主要由药箱,离心泵,调压阀,喷头、风扇以及各种管道等组成。
药箱通过阀门进入主管道,为避免药液中较大的颗粒或其他杂质堵塞喷头,药液需要首先进入过滤器。主管道与调压阀相连,调压阀用于稳定喷药管道的压力,进过调压阀后,输出管道分成左右两个分管道,左右两个分管道的末端各接3个高压电磁阀,每个电磁阀后接2个喷头,一共12个喷头。西门子PLC通过控制电磁阀的开闭来控制喷头是否喷药。
1.2 控制系统设计
控制系统主要由PLC控制器、红外测距传感器、速度传感器、人机交互触摸屏、电磁阀、固态继电器及其他外围电路等组成,如图2所示。

图2 系统结构图
控制系统以西门子PLC-224XP为控制核心,处理传感器的各种信号,完成与触摸屏幕的人际交互,控制电磁阀的动作。红外传感器列阵用来检测拖拉机左右两侧的果树树冠的高度及宽度,本文选用上海森正电气有限公司生产的E3K80-DS5M1漫反射红外传感器,检测最大距离150cm。传感器在探测到靶标后,输出开关信号。红外传感器信号输出端需要外接10kΩ的上拉电阻,实现与PLC的IO口连接。
系统采用霍尔传感器感应拖拉机的行驶速度,霍尔传感器是浙江沪工自动化科技有限公司生产的NJK-5003C,属于NPN常开型,检测速度时需要配合强磁铁使用,最大感应距离5cm。本系统在拖拉机的轮毂上均匀分布了6个强磁铁,拖拉机轮子每转动1圈,霍尔传感器输出6个脉冲。控制器通过脉冲信号来计算拖拉机的行驶速度及累计行驶距离。
电磁阀采用上海凯志阀门有限公司公司生产的V2A102,电磁阀压力范围0~1.0MPa,满足喷药工作压力要求。由于PLC输出口的输出电流比较小,无法直接驱动电磁阀,需要设计相应的驱动电路来控制电磁阀的开启。控制器通过控制固态继电器的通断,进而控制电磁阀的开闭。
人机交互界面采用深圳显控发展有限公司的SA-7触摸屏,实现人机交互,通过触摸屏可以输入各项参数数据,实时显示传感器的各项数据,并可以手动打开和关闭电磁阀,方便操作。
1.3 工作原理及控制算法
系统通过检测靶标情况,结合拖拉机的运行速度,通过控制电磁阀来实现对靶变量喷药。对靶喷药的关键点在于:传感器与喷头不在同一作业面,传感器在拖拉机车头,喷药喷头在拖拉机车尾,拖拉机先检测靶标并存储数据和靶标位置,根据系统设置参数计算喷药的位置及喷药宽度。计算之后作业,解决靶标检测与喷药的不同步性问题;控制喷药的喷洒范围,做到有靶标喷药,无靶标停止喷药,实现精准喷药和根据速度变量作业。
PLC首先根据按键选择,判断喷药机处于何种工作模式下。如果按键没有按下,判断喷药机处于手动控制下,PLC放弃对喷药执行单元的控制;如果按下按键,则喷药机处于自动喷药模式。
在自动喷药模式下,需要操作者预先设定单位面积的喷洒量,此后控制器会根据设定值自动控制喷药作业。
开始工作后,PLC通过霍尔传感器采集速度信号。拖拉机的轮毂上均匀地安装了6块强磁铁,在拖拉机运动时,霍尔传感器每接近1个磁铁即输出1个脉冲,每周输出6个脉冲。
由于拖拉机的轮子转动1周的距离是固定的,所以在传感器输出两个相邻脉冲的间隔时间内拖拉机的移动距离是相等的。PLC根据两个脉冲之间的时间,计算出拖拉机的瞬时速度v,公式为
v=sd/△t
式中v—拖拉机行驶速度(m/s);
sd—单一脉冲所代表的距离(m);
Δt—相邻两个脉冲之间的时间间隔(s)。
拖拉机的行驶距离可以根据累计脉冲数和速度计算,当霍尔传感器刚好接近强磁铁时,此时的脉冲数乘以单位距离正好就是行驶距离,即
st=n·sd
式中st—拖拉机行驶距离(m);
n—脉冲数。
当传感器位于两个强磁铁之间时,由于下一个脉冲尚未来到,脉冲数维持不变,但实际距离在变大,需要估算增大的这部分距离,用sa表示。这一距离可以采用速度对时间的积分来计算,在这一区间认为拖拉机速度没有突变(急刹车情况除外),则拖拉机实际的距离为
式中v—拖拉机行驶速度;
sa—采用积分计算的距离;
Δt—相邻两个脉冲之间的时间间隔。
计算出累计距离用于对靶标定位,控制系统为每个传感器建立1个数据缓冲区。当传感器检测到果树树冠时,输出高电平信号,控制器在上升沿信号触发下,记录当前行驶距离s1,则树冠检测开始点为s1;如果传感器端口恢复低电平,控制器检测不到树冠,控制器在下降沿信号触发下,记录当前行驶距离s2,则树冠检测停止点为s2。传感器检测范围为
wse=s2-s1
式中wse—感应范围(cm);
s1—感应起始点;
s2—感应终止点。
由于传感器的检测范围有限,树冠一些地方超过了检测范围,传感器的检测宽度比树冠宽度要小,在进行喷药时,需要对这一宽度进行校准,设定喷药校准宽度为wj(可以通过触摸屏设置),在检测树冠之前和之后都需要校准。由于传感器与喷药喷头不在一个工作面,控制器需要计算喷头喷药的起始点和终止点。设传感器与喷头的之间的距离为wL,起始点和终止点采用下面公式计算,即
式中wj—校准宽度(cm);
wL—传感器与喷头之间的距离(cm);


控制器为每个传感器建立了1个对应的缓存区,这些数据计算完之后存储到数组中,拖拉机在行驶中控制系统将不停地查询规格数据区,将喷药机的实时距离st与存储的数据进行对比,当到达喷药位置时,开启喷药;到达终止位置时,关闭喷药。
根据单位面积地块的喷药量要求,单位面积(1m2)内的喷药量为K0,则
式中R—施药量(mL);
Sare—面积(m2);
K0—单位面积施药量(常量)。
拖拉机喷药覆盖的面积等于喷药覆盖幅宽(La)乘以行驶距离,即
式中La—喷药覆盖幅宽。
在行驶过程中,喷药机单位时间内的喷药覆盖面积根据如下公式计算,即
则单位时间内的喷药量为
式中Q—喷药流量(mL/min)。
由推导公式可知:单位时间内喷药量(喷药的流量)与拖拉机的实时速度v呈线性关系。
控制系统根据行驶的速度调整喷药流量,从而达到变量喷药的目的,而喷药流量又与控制喷头电磁阀的频率与占空比之间存在线性关系,所以变量喷药的核心在于根据拖拉机的实时速度调整频率和占空比。
PLC采集速度值后,根据控制器内部计算,得出喷头对应控制的频率和占空比,通过Q0.0~Q0.5通道输出6路不同的PWM波,驱动电路根据PWM波驱动电磁阀的开闭。
PLC通过内部精准的1ms定时器产生中断,中断服务程序控制输出端的高低电平,产生精准PWM波。输出端口连接固态继电器的输入端,固态继电器的响应时间小于1ms,精度较高,满足快速要求。固态继电器的输出电路跟随PWM波形通断,进而控制电磁阀的开启和关闭,通过控制不同的频率和占空比来驱动电磁阀,调节喷头流量,达到变量喷药的目的。当电磁阀打开后,药液在高压下快速进入喷头,通过喷头后呈雾状散开。
2 试验与结果分析
2.1 果园靶标检测试验
试验地点位于北京市昌平区小汤山镇国家精准农业研究示范基地,试验装置如图3所示。
喷药机设计的传感器安装架采用了多孔设计,传感器固定臂可以调节安装高度,以适应不同果树的高度和树冠大小。
选取园内的樱桃树作为试验对象,根据樱桃树的大小,调节6个传感器的安装高度,使得1#与2#传感器的高度为0.8m, 3#与4#传感器高度为1.2m,5#与6#传感器高度为1.6m。选取4棵相邻的果树并为之编号,测量每棵树对应地面高度为0.8、1.2、1.6m时的树冠的实际宽度wcr。传感器检测到树冠时,传感器会输出低电平,根据电平信号的下降沿记录树冠起始点;当传感器检测不到树冠时,传感器会输出高电平;根据电平信号的上升沿,记录树冠终止点;根据二者之间距离计算系统的检测宽度wse。靶标检测试验结果如表1所示。

图3 喷药实验装置

试验号速度/m·s-11#(高度80cm)树冠宽度/cm检测宽度/cm喷雾宽度/cm相对误差/%2#(高度120cm)树冠宽度/cm检测宽度/cm喷雾宽度/cm相对误差/%3#(高度160cm)树冠宽度/cm检测宽度/cm喷雾宽度/cm相对误差/%10.5416415418613.415013617315.311210213217.80.761641531767.31501361628.011210212612.51.161641511693.01501331574.71121021196.320.5421820424512.424523227010.223621926011.10.762182032399.62452322556.92362202547.71.162182032326.42452302402.02362192505.930.5423022026113.42882683159.423422526412.80.762302182519.12882673055.92342252559.01.162302182446.12882652962.72342232444.340.542952743187.83263043466.12842603057.40.762952723105.13263023373.42842562964.21.162952743012.13263003311.52842582902.1
为了测量实际喷雾宽度,在树木两侧插上竹竿,竹竿与果树树干平行,并使宽度超过整个树冠1m;分别在高度80、120、160cm的树冠位置挂上宽度为20cm的白色塑料纸,纸的分布沿着拖拉机运动方向。
在进行喷药试验时,往喷药罐中加入50mL的罗丹明,使得喷雾药滴呈现红色,根据红色雾滴在白色条上的分布,可以测量实际的喷药宽度。
根据试验结果数据,拖拉机在3种不同速度条件下,控制系统均能对果树树冠有效识别,靶标识别率为100%。对于同一区域的靶标,系统在不同速度条件下,测定靶标宽度基本相同,误差小于4cm。所以,在拖拉机的行驶速度小于1.16m/s时,速度几乎不会影响红外传感器的靶标识别。
根据对靶喷药的控制算法,喷药机首先探测靶标;探测到靶标后,记录靶标的位置,系统在行驶过程中不断地将行驶距离与存储的数据进行对比。为了保证整个树冠都在喷药范围内,必须提前开始喷药,而到达停止位置,还需要继续喷药。
根据表1的试验结果,在本实验条件下控制系统对靶标识别后,均能实现对树冠的喷药覆盖。
根据系统工作原理分析,红外传感器德检测靶标反应时间不大于1ms,控制器的执行速度也在ms级,电磁阀的响应时间为20ms,执行速度比较快,而拖拉机在果园作业速度一般不超过1.2m/s。喷雾范围的误差主要是由于拖拉机行驶速度的检测误差、累计行驶距离误差、喷药执行延时及外界环境因素等造成的。
对于同一靶标区域,行驶速度越大,喷药宽度越小,但是速度对检测宽度几乎没有影响。根据喷药控制算法,控制器是以实际检测的靶标宽度为控制基础的,在到达靶标之前提前一定的距离喷药,而在刚好没有靶标的位置还要继续喷药,宽度都是预先设定的。速度对于喷药宽度有影响,但是引起的绝对误差变化值相对较小。本次试验中,在设定宽度为15cm的条件下,随着速度的增大,喷药宽度会减小,喷药的相对误差也越小,最大误差17.8%。
根据整体试验结果,在相同的速度及喷药设定宽度不变的情况下,靶标的树冠越大,喷药宽度的相对误差较小。这是因为即使速度条件改变时,控制器对靶喷药算法基于实际距离控制,实际喷药宽度没有发生显著的对应变化,树冠越大,农药的浪费也越小。
2.2 果园变量喷药试验
喷药机根据行驶速度实行变量喷药,为验证果园喷药变量调节,使用果园试验装置,测定不同速度下的喷头流量。设定每667m2地的喷药量为60L,调节压力阀门,使得喷雾压力为0.40MPa,设定PWM驱动电路的频率为10Hz,根据前面的推导公式,占空比与速度之间存在线性关系。
喷雾机设定在自动喷药模式,拖拉机在4种不同的速度下行走,分别为慢速Ⅲ挡(0.39m/s)、慢速Ⅳ挡(0.54m/s)、快速Ⅰ挡(0.76 m/s)及快速Ⅱ挡(1.16m/s),采集单个喷头每分钟的喷药量。为了准确地测量喷药量,控制器采用了定时中断,开启喷药后开始计时,当喷药1min时停止喷药。采集喷药量采用了套袋收集法,体积计算采用了质量测量法,即采用精密电子秤测量收集到的液体质量,根据密度计算体积;每次测量3次,取3次的平均值作为实际喷药量。测量数据如表2所示。
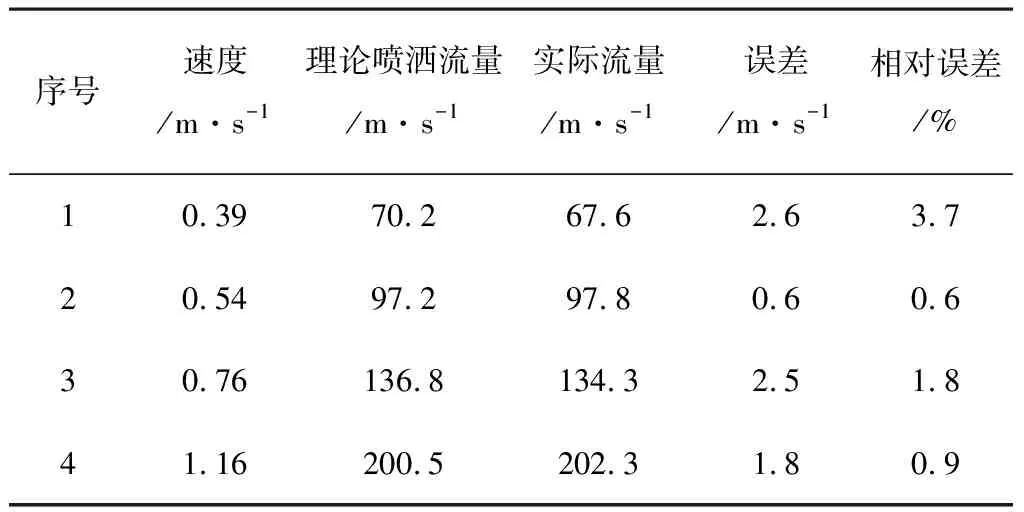
表2 变量喷药试验
3 结论
1)本文针对果树树冠设计的靶标探测器能探测喷药机两侧果树,根据喷雾宽度、延迟距离及拖拉机速度等参数计算出靶标喷雾范围,准确控制阀门进行对靶喷药作业。
2)果园对靶实验表明:在行驶速度不大于1.16m/s时,传感器对树冠的检测几乎不受速度影响;在设定宽度15cm条件下,速度会影响喷药宽度,速度越快,喷药宽度的相对误差越小。
3)果园变量喷药试验表明:根据速度调节喷头电磁阀占空比,可以有效调节喷药流量,实现变量喷药,单个喷头喷药流量误差不超过2.6mL/min,最大相对误差3.7%。
猜你喜欢
今日农业(2022年4期)2022-11-16
信息记录材料(2022年3期)2022-05-17
今日农业(2021年13期)2021-11-26
军民两用技术与产品(2021年10期)2021-03-16
湖南工业大学学报(2020年6期)2020-11-27
农家参谋(2020年6期)2020-07-29
东方企业家(2020年5期)2020-05-29
山西文学(2019年8期)2019-11-01
世界农药(2019年3期)2019-09-10
文学港(2019年5期)2019-05-24