电动气吸式排种器的电机转速特性研究
2019-12-22 05:50许雯晴衣淑娟李渤海李衣菲
农机化研究 2019年2期
许雯晴,武 志,衣淑娟,李渤海,李衣菲
(1.黑龙江八一农垦大学 a.电气与信息学院;b.工程学院,黑龙江 大庆 163319;2.黑龙江北大荒农机有限公司,哈尔滨 150090)
0 引言
目前,在现代化农业生产中,现代农业机械设备和生产系统已不再是传统的单纯机械系统,而是机电一体化的综合系统。电动播种机是一个复杂的机电系统,为了提高排种精度和增加产量,对连接排种器驱动电机的转速和扭矩的研究是至关重要的。
无刷直流电机结构简单,具有较高的转速范围、更好的转速与转矩特性,以及工作稳定、使用寿命长等优点[1-3]。用无刷直流电动机作为排种器驱动电机,可以为电动排种器驱动电机做精确选型。BLDC 的气隙磁密为方波分布,反电动势波形与相电流波形分别为梯形波和方波[4-6]。无刷直流电动机在双闭环控制系统中拥有较好的动态性能与静态性能、较强抗干扰能力[7-10]。系统采用了PID控制技术,在MatLab软件中搭建系统的仿真模型,能够较好地监测转子转速,响应快,无超调,具有良好的鲁棒性,从而通过传动精确地调节排种器转速,提高了排种的均匀性和稳定性。
1 电机选型与负载计算
为排种器选择正确的电机类型至关重要,要根据驱动负载计算及特性选择参数正确的电机,防止大马拉小车,使电机处于轻载的情况下运行。排种器选择电机的3个条件为:①排种器所需转矩Tpl小于电机峰值转矩Tpm;②电机的额定转矩要大于排种器的平均连续转矩Trms;③排种器所需转速ωpl小于电机最大转速ωpm。
排种器的电机选择需要的数学形式条件为
Tl(t)·i≤Tpm
ωl(t)·i≤ωpm
i=ZL/ZP
其中,i为传动比;Tl(t)、ωl(t)为排种器扭矩和排种器转速啮合传动转换成电机的对应项。
连接到电机上的排种器决定了负载转矩和摩擦转矩,考虑克服摩擦需要的转矩及惯性转矩,则
Tpm=(Tpl+TJm+TF)×1.2
Tp=TL+T0
其中,TJm为惯性转矩;TF为克服摩擦转矩;T0为空载损耗转矩。
将以上公式计算得出的数值带入如下公式中计算,即
电动机转速和排种器的转速两者间关系式为
ωpl=K×ωpm×r
式中r—排种器半径。
2 电机PID控制系统模型
假设电机的三相绕组完全对称,气隙间的磁场为方波,定子电流与转子磁场的分布都是对称的;不考虑齿槽、电磁场的换相过程与电枢反应等的影响;缠绕在定子内表面的电枢绕组的分布是连续均匀的;磁路不饱和,不计算涡流与磁滞亏耗[11]。BLDCM的定子三相绕组的电压动态方程为
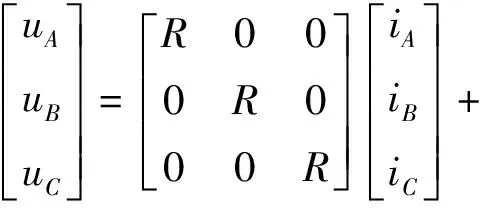
其中,uA、uB、uC为三相绕组每相的相电压;R为三相绕组每相的电阻;iA、iB、iC为三相绕组每相的相电流;L为三相绕组每相的自感;M为三相绕组每两相的互感;eA、eB、eC为三相绕组每相的相反电动势。
3组线圈产生的磁场具有120°相位差,每相的反电动势方程为
eA=KWf(θe)ω
eB=KWf(θe-2π/3)
eC=KWf(θe+2π/3)
由上述公式可知:当电机起动时刻,由于转速为0(即ω为0),为了避免计算时直接按此公式建立模块会产生错误,由上式给定的反电动势公式,可先对电磁转矩公式进行计算。电磁转矩Te可以用如下公式表示,即
Te=(eAiA+eBiB+eCiC)/ω
传递到电机轴的机械扭矩为
其中,Te为电磁转矩;Tl为排种器转矩;J为转子惯性转矩;B为阻尼系数。
3 BLDCM双闭环控制系统
所有电机的转速控制系统皆以转速作为给定值,并且使电机的速度随着给定量来控制[12]。
为了能够使系统拥有较好的调速性能,需要构造一个闭环系统[13]。采用BLDCM双闭环控制系统,具有抗负载扰动和良好的启动性。系统的内环是电流环,设置了电流PI调节器,外环是转速环,设置了速度PI调节器,都采用PID控制。为了能够实现转速与电流两种负反馈分别调节转速与电流,其两者间应用串级联接。把转速的PI调节器输出当作电流的PI调节器输入,再用电流的PI调节器输出来控制功率驱动模块。
电流转速双闭环PID控制系统具有响应迅速、鲁棒性强及无超调等优点[14]。在同一负载扰动的情况下,电流转速双闭环相较于开环,瞬间速降,转速恢复时间都要短,具有很好的抗扰性。图1为双闭环系统仿真框图。

图1 双闭环系统仿真图
依照系统各部分的功能和模块化建立模型的理论,把BLDCM双闭环控制系统切分成各个子模块都具有独立功能,无刷直流电机建模整体结构图如图1所示。根据图1得到的功能模块主要包括无刷直流电动机的自身模块、电流的采样模块、PWM模块、速度控制模块及逆变器模块。
3.1 电流环结构设计
电流环控制电动机的扭矩,因此驱动器的运算最小,动态响应最快的是在扭矩模式下。电流环以跟随性能为主,并且要求稳态电流无差,应依照典型的Ⅰ型系统进行设计。其开环传递函数为
电流环结构如图2所示。
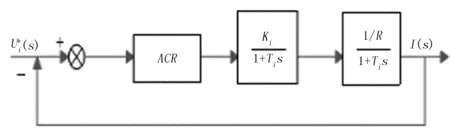
图2 电流环结构图
3.2 转速环结构设计
根据转速稳态无静差的要求,转速的PI调节器中必须要含有积分环节。再根据动态要求,按照典型的Ⅱ型系统进行设计。其传递函数为
其转速环结构如图3所示。
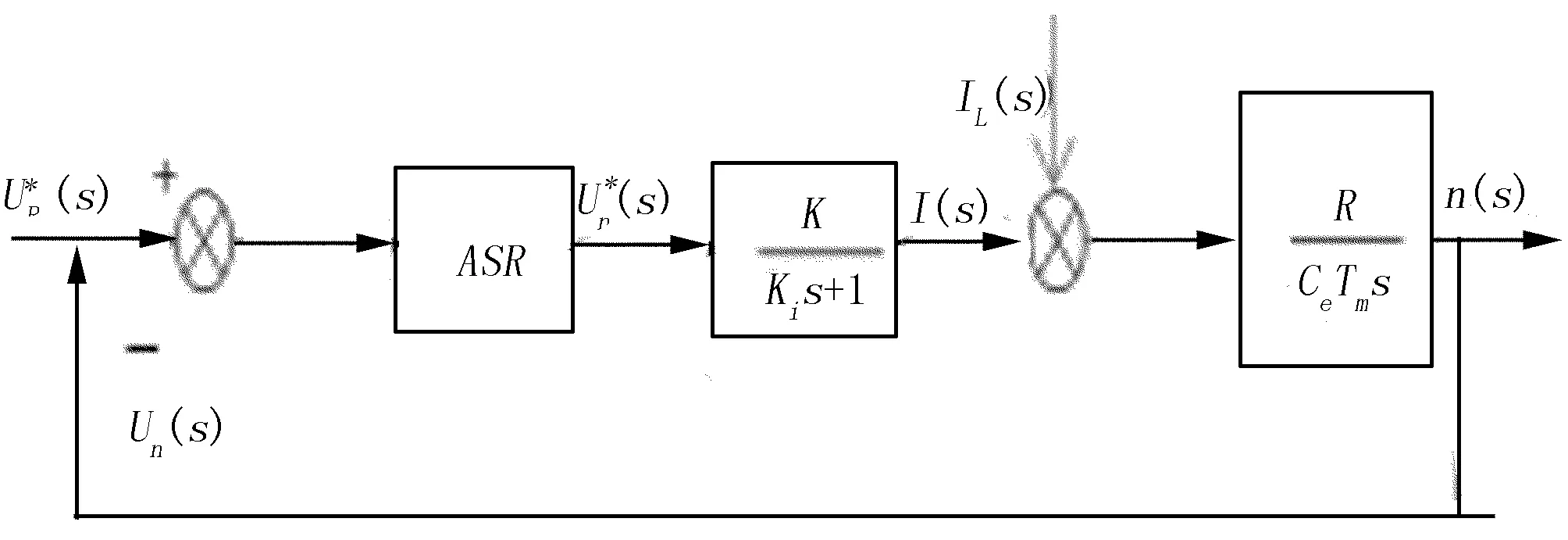
图3 转速环结构图
4 控制系统仿真与试验
在MatLab软件中,通过进行仿真分析双闭环控制系统模型,BLDCM参数设置为:定子相绕组电阻R=2.8Ω,互感M=-0.0085H,转动惯量J=0.0008kg·m2,极对数np=4。
由于电动气吸式排种器能够接受的转速范围为6~40r/min,经过传动比计算得到电机的转速范围为30~200r/min,为了验证BLDCM 双闭环系统仿真模型的动、静态性能,从仿真波形图4可以看出:开启电动机后,能够快速达到恒定转速;启动0.1s后,加入负载,电机又能快速以新转速运行。从图5可以看出:系统可以快速响应,调整到相应的稳态。
电机的相电流、电压波形如图6和图7所示。

图4 转速响应曲线
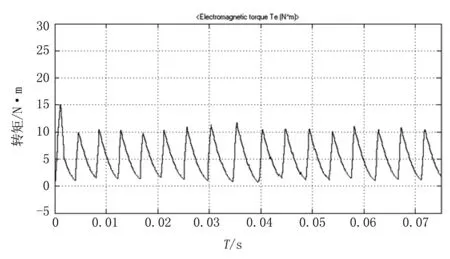
图5 转矩响应曲线

图6 相电流波形

图7 相电压波形
搭建连接电动气吸式排种器的BLDCM双闭环控制系统试验平台。试验在常温常压下,电动气吸式排种器为负载,给定电流信号后,调节PI参数,借助扭矩传感器测出动态扭矩。试验结果表明:排种器运行稳定,系统有效地降低了电动机转矩脉动。
5 结论
1)设计了基于BLDCM的双闭环控制系统,采用PID的方法进行控制,配合了负载与转矩的计算。针对双闭环系统在MatLab/simulink软件中建立模型并且进行仿真。结果表明:波形符合理论分析,系统响应快,无超调,拥有良好的动态性能与静态性能。
2)搭建连接电动气吸式排种器的BLDCM双闭环控制系统的试验平台,通过试验分析比较仿真结果具有一致性,有效地降低了转矩脉动,减少电机能耗。排种器能够快速达到额定转速并稳定运行,说明了该方法的有效性与实用性。
猜你喜欢
中国农业文摘-农业工程(2022年5期)2022-11-23
防爆电机(2022年3期)2022-06-17
北京航空航天大学学报(2022年5期)2022-06-06
新疆农机化(2022年1期)2022-03-02
农机质量与监督(2021年9期)2021-12-27
防爆电机(2020年5期)2020-12-14
防爆电机(2020年3期)2020-11-06
电子制作(2019年23期)2019-02-23
电子制作(2018年11期)2018-08-04
电脑知识与技术(2016年18期)2016-11-02