基于CRLS的路面坡度及轮毂电机车辆质量估计
2019-12-20 06:41刘会康
数字制造科学 2019年4期
付 翔,刘会康,黄 斌
(1.武汉理工大学 汽车零部件技术湖北省协同创新中心,湖北 武汉 430070;2.武汉理工大学 汽车工程学院,湖北 武汉 430070)
在车辆控制领域,整车质量是一个基础又关键的参数,对于驱动控制、能量管理控制和安全控制必不可少。如果直接使用整车整备质量或满载质量作为控制参考量,将会影响驱动控制精度或安全控制效果,因此结合现有的传感测量技术和参数估计算法进行整车质量参数估计具有十分重要的研究意义和应用价值[1]。结合轮毂电机电动车辆结构简洁,效率高,可实现更加复杂的驱动与制动控制[2-4],并且实时转矩和转速可以准确获取的特点,对整车质量和路面坡度参数估计算法进行设计。
车辆参数估计算法目前以最小二乘法、卡尔曼滤波、扩展卡尔曼滤波、自适应卡尔曼滤波等相类似的计算方法为主。此外滑模观测器、模糊观测器以及基于利亚普诺夫理论推导的非线性观测器,神经网络算法也得到了一定的应用[5]。在整车质量与路面坡度参数估计方面,林楠等[6]以纵向加速度传感器表达道路坡度变化率,建立车辆速度、加速度、路面坡度的状态转移关系,构建了坡度估计卡尔曼滤波器,进行路面坡度的估计。褚文博等[7]同时运用动力学模型和运动学模型,利用高频信息提取加递归最小二乘法进行质量估计,并利用估计参数进行坡度的运动学和动力学方法的融合观测。雷雨龙等[8]以提高换挡品质为研究目标,提出应用扩展卡尔曼滤波进行车辆质量和道路坡度的估计,并进行了实车道路试验数据的离线仿真验证其参数估计的有效性。胡丹[9]提出应用双扩展卡尔曼滤波同时估算车辆状态与附着系数的思想,使得两部分估计器的信息相互交换,相互校正,实现了状态参数的较高精度估计。
通过对以上整车质量和道路坡度参数估计的文献分析发现,质量和坡度参数估计算法的设计离不开整车纵向动力学模型和运动学模型[10],结合可获取的输入变量,将动力学模型或运动学模型与现有算法融合,便可实现一定精度的参数估计,复杂的数学模型与多种算法的融合虽然可以提高参数估计精度,但参数估计的实时性和适应性有待考量[11]。笔者在分析整车质量和道路坡度两参量估计的重要性和前人研究工作成果基础上,对比了不同类型参数估计方法的利弊。提出以整车纵向动力学公式为参数估计模型基础公式,分析两个待估计变量的特点,将参数估计模型与递推最小二乘法(recursive least square,RLS)结合,搭建出一个简洁有效的参数估计算法,实现两参数联合估计,在保持一定参数估计精度的前提条件下,提高模型运行的高效性与实时性。
1 CRLS参数估计算法设计
1.1 轮毂电机车辆整车纵向动力学模型的建立
轮毂电机4轮驱动电动汽车与传统汽车相比,其取消了发动机,整车驱动力由车轮处的轮毂电机提供;且未配备变速箱,只采用轮边减速器,选定轮边减速器速比i0=5,根据汽车旋转质量换算系数图可知,选取旋转质量换算系数δ近似为1,因此本文取δ=1。根据轮毂电机驱动车辆驱动形式,结合传统车辆纵向动力学模型[12],得到如式(1)所示车辆的纵向动力学模型:
式中:i0为轮边减速器减速比;Ttq为4个轮毂电机驱动转矩之和;ηT为传动系统机械效率;r为车轮半径;m为整车质量;f为滚动阻力系数;G为整车重力;α为路面纵向坡度角;CD为空气阻力系数;A为迎风面积;ua为车速;du/dt为纵向加速度。
1.2 整车质量与路面坡度联合估计算法设计
在参数实时估计与辨识领域,最小二乘法得到了广泛应用,RLS是最小二乘法的递推形式,对于一个单输入-单输出系统(simple input simple output,SISO)来说,采用该算法不需要已知任何先验条件,并且计算量小,收敛速度快,可以实现参数辨识的快速收敛,满足整车控制系统对实时性和精度的要求[13]。
递推辨识算法的思想可以概括为:新的参数估计值=旧的参数估计值+修正项,即新的递推参数估计值是在旧的递推估计值的基础上而成。对于一个n阶自回归模型:
y(t)=a1y(t-1)+…+any(t-n)+ε(t)
(2)

其递推最小二乘法参数估计表达式为:

(3)
(4)
(1-K(t+1)φT(t+1))P(t)/λ
(5)

整车质量在行车开始之后是一个不变的量,而路面坡度是时变参量,因此本文采用一般RLS和指数加权RLS分别对整车质量及路面坡度进行在线辨识。在使用递推最小二乘法进行多参数辨识时,不同的参数辨识顺序会影响参数的辨识结果。在辨识顺序的问题上,考虑到整车质量是整备质量与载荷相加得到,而起步时路面坡度却没有选取基准,因此将整车的整备质量定义为整车质量初值。笔者提出了一种基于整车质量初值进行路面坡度估计,然后将路面坡度估计值返回质量估计模块,进行整车质量实时估计的CRLS(circle recursive least square)估计算法如图1所示。
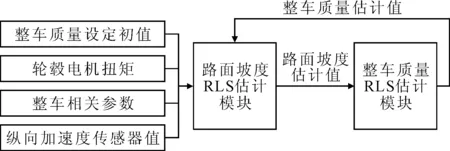
图1 CRLS算法流程图
对整车的纵向动力学模型进行以下变形:
(6)

其中θ为含有路面坡度变量的表达式。因此根据递推最小二乘法参数估计公式可进行路面坡度递推算法设计。同时,遗忘因子的选取范围为(0,1],考虑到路面坡度的变化特性,旧的观测数据对新的参量估计影响较小,因此选择遗忘因子λ=0.9。
通过式(7)可求出相应路面坡度估计值为:
(7)
得到坡度估计值后,将该坡度值作为质量估计模块输入变量,进行整车质量估计。再次对整车纵向动力学表达式进行变形可得:
(8)

由以上变形公式和递推最小乘法递推公式可得整车质量递推算法。
2 联合仿真与实车试验验证
2.1 联合仿真试验
为了验证笔者提出的质量及坡度估计算法的有效性,在Matlab/Simulink中建立轮毂电机模型,并与Carsim中已做修改的全尺寸SUV车型进行连接,实现了4轮轮毂电机驱动车辆模型的搭建。质量和坡度估计模块使用S_Function编写程序,实现了CRLS算法迭代过程。在Simulink中搭建的联合仿真模型如图2所示。
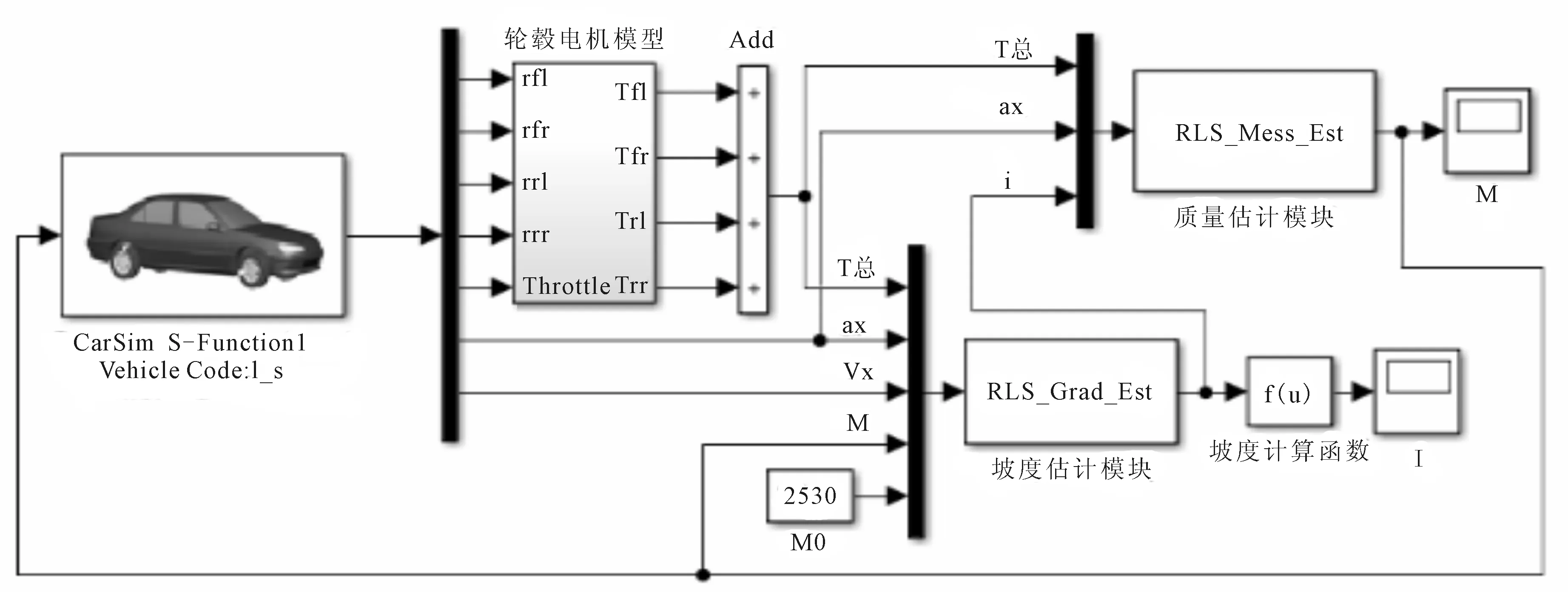
图2 联合仿真模型
在Carsim软件中建立了道路坡度30%(坡道角为16.7°)和50%(坡道角为26.6°)的两种坡道,并在对比仿真试验中改变了整车质量。验证了笔者提出的质量及坡度估计算法的有效性。道路坡道角16.7°、匀速30 km/h的仿真试验结果如图3和图4所示。
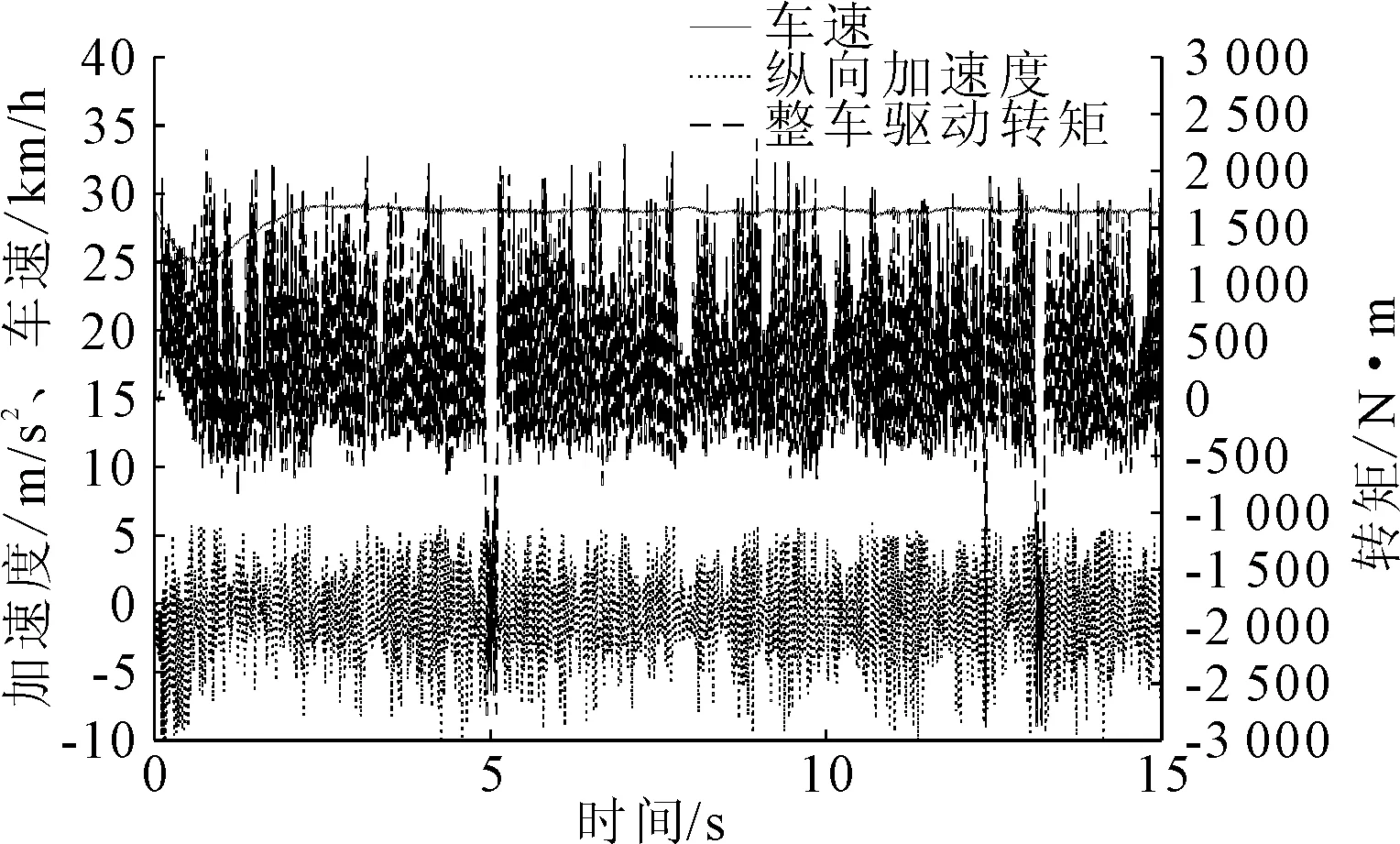
图3 车速、纵向加速度、驱动转矩实时变化曲线图
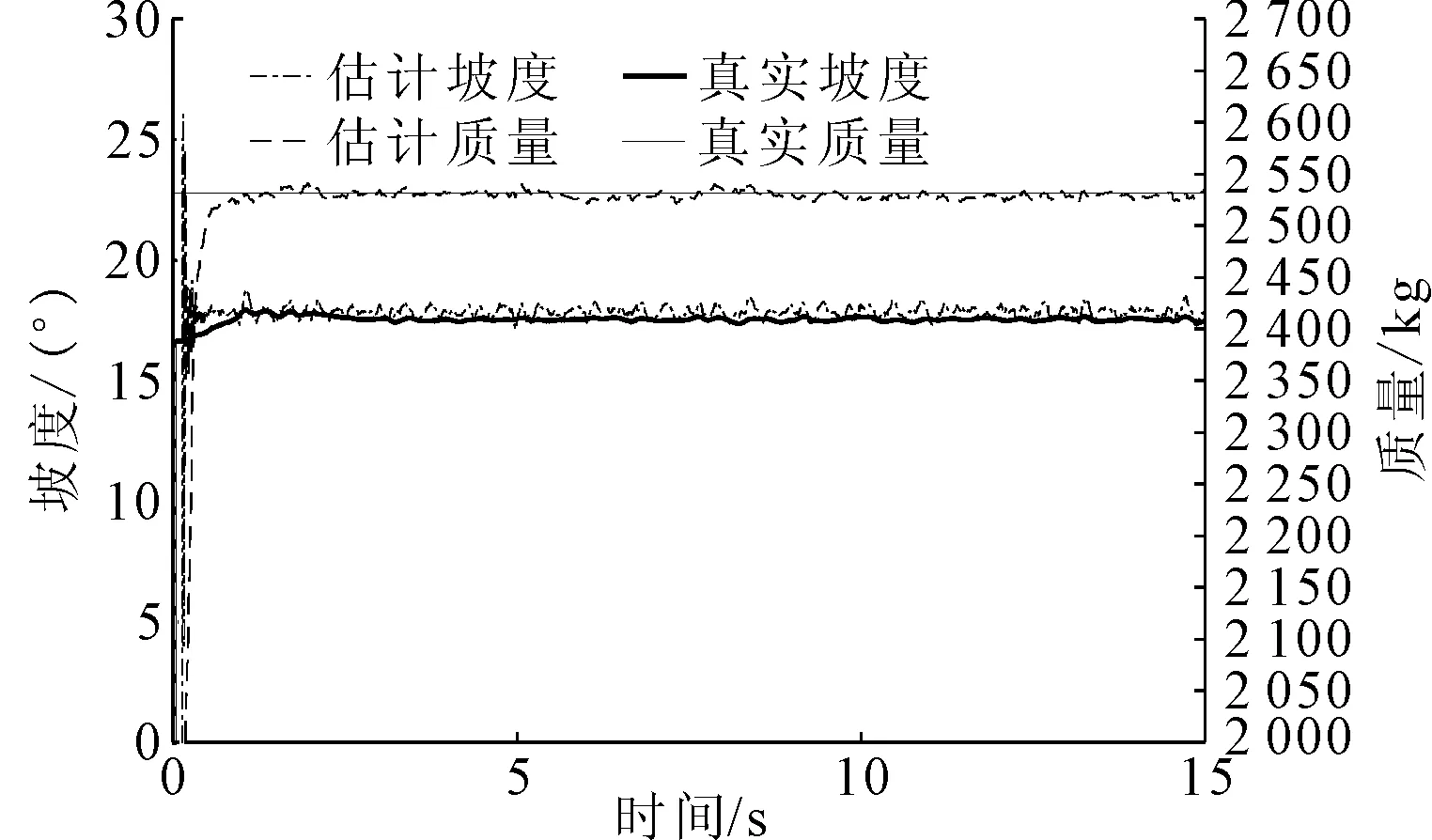
图4 参数估计结果
道路坡道角26.6°、匀速30 km/h,并增加200 kg载重,其仿真试验结果如图5和图6所示。
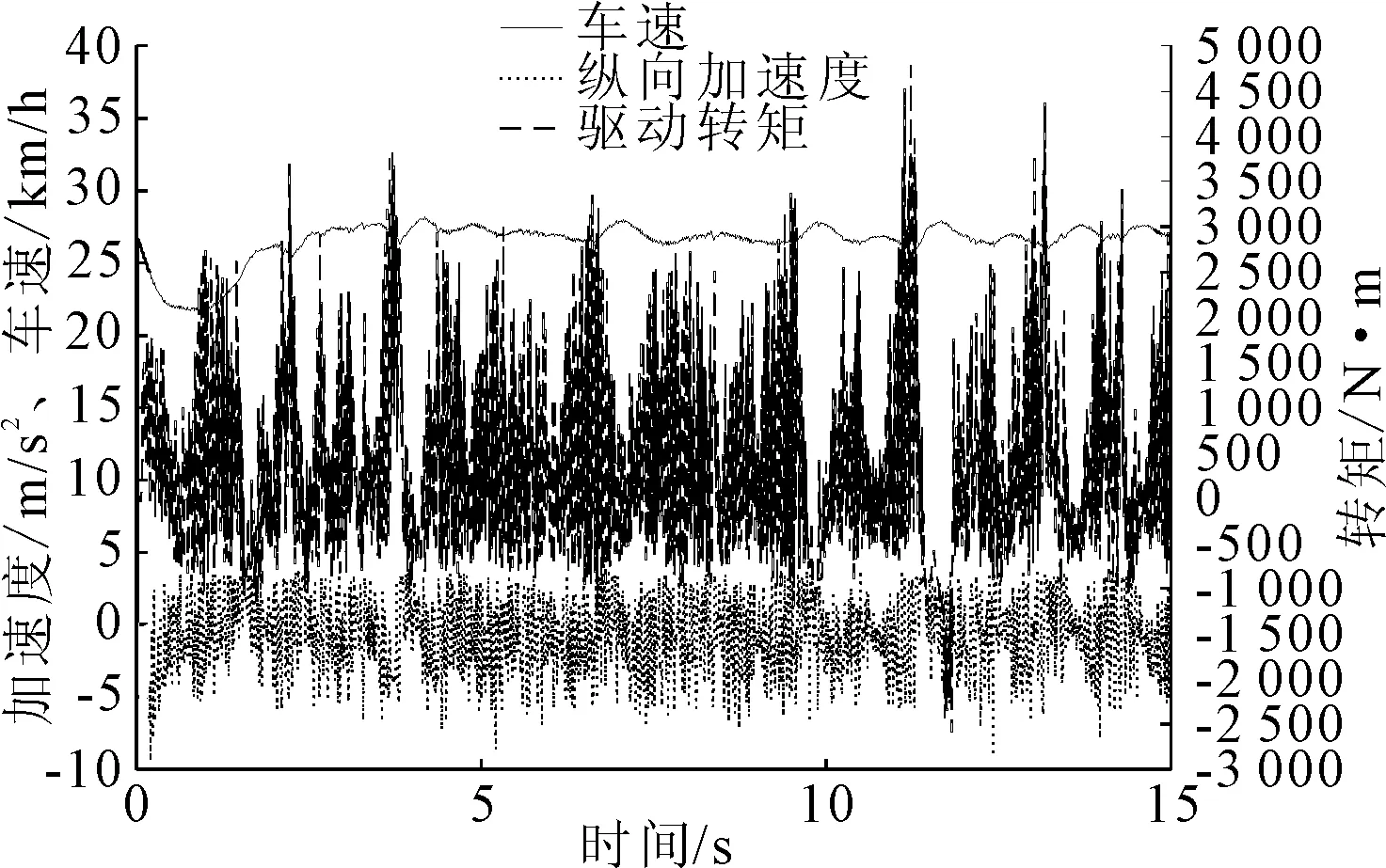
图5 车速、纵向加速度、驱动转矩实时变化曲线图
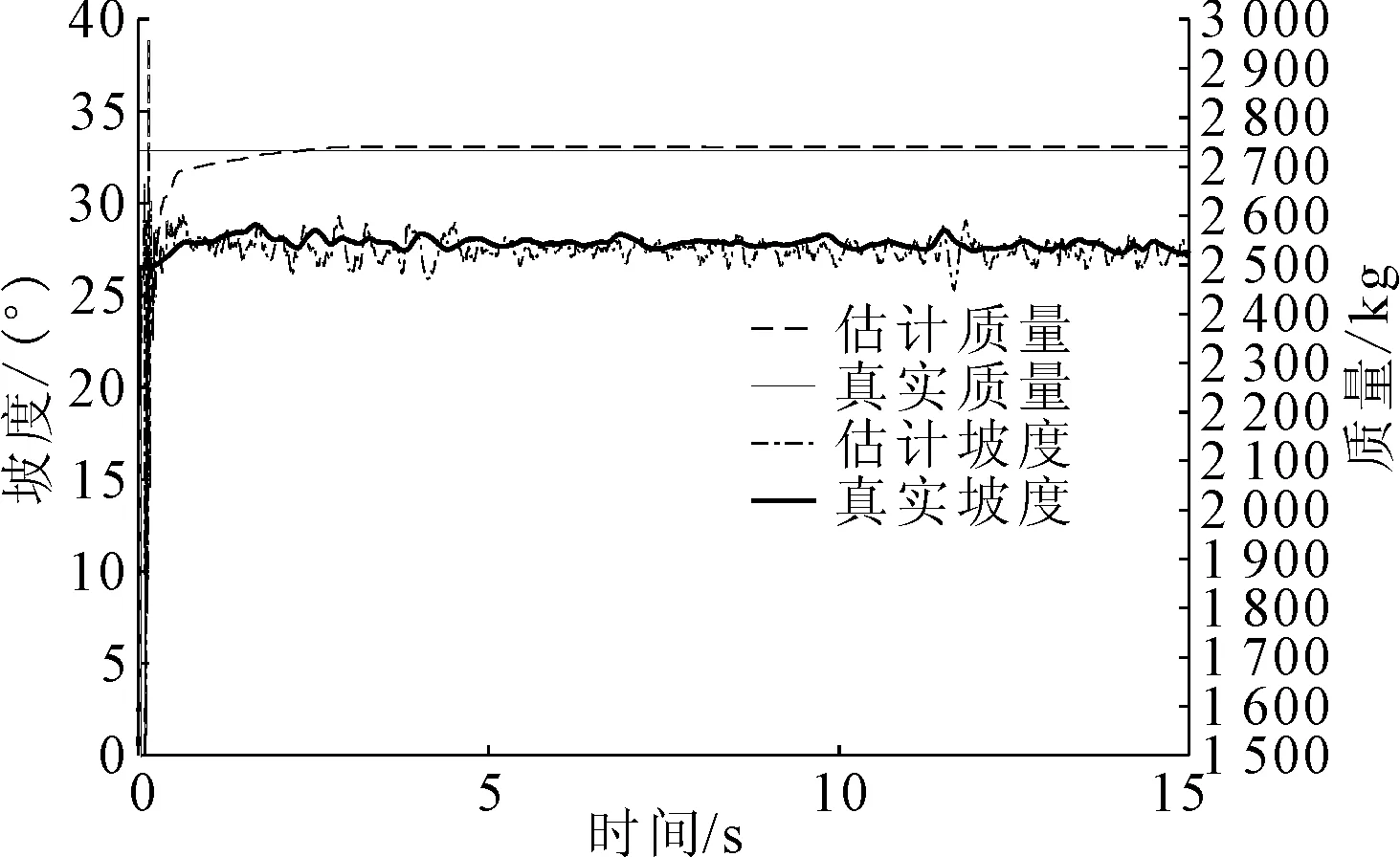
图6 参数估计结果
笔者提出的CRLS估计算法可以实现对路面坡度和整车质量实时估计,整车总质量设定值为2 530 kg、2 730 kg;路面坡度设定值为16.7°、26.6°。从联合仿真结果可以看出:质量估计值很快收敛到设定值附近;坡度估计值也很快收敛到设定值,且坡度估计误差在2°以内,质量估计误差在10 kg以内,算法估计精度较高,收敛速度快且稳定性较好。
2.2 实车试验
进行实车道路试验是对所建立估计模型的更有意义的验证。以东风汽车股份有限公司所开发的某款4轮轮毂电机驱动越野车辆为试验平台,进行整车质量及道路坡度估计算法实车试验验证。在襄阳国家汽车质量监督检验中心标准坡道试验场进行50%(坡道角26.6°)坡度爬坡试验。整车相关参数、单个轮毂电机相关参数如表1和表2所示。
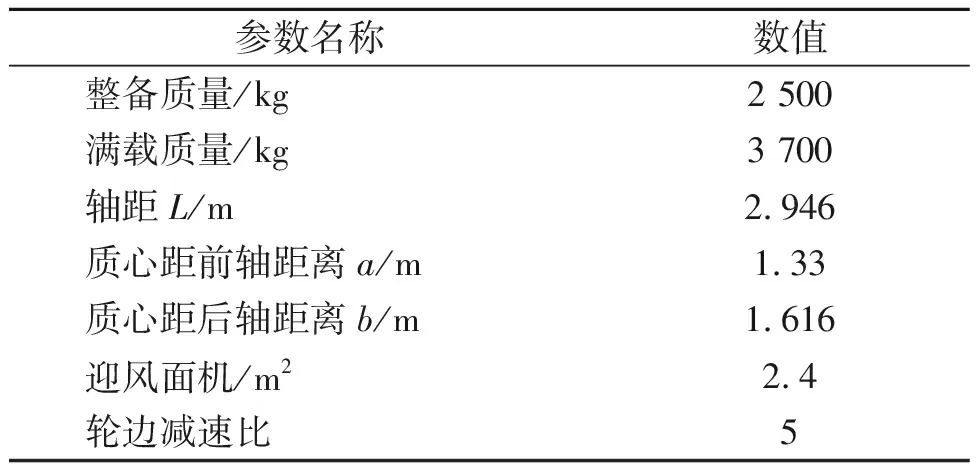
表1 整车参数表
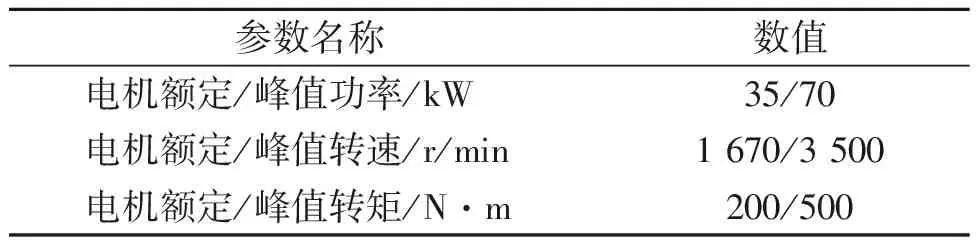
表2 单个轮毂电机参数表
在车辆质心位置安装纵向加速度计,实时测量整车纵向加速度,作为参数估计输入参量,同时将参数估计算法载入整车控制器中实时运行。在26.6°标准坡道上进行爬坡试验的结果如图7和图8所示。
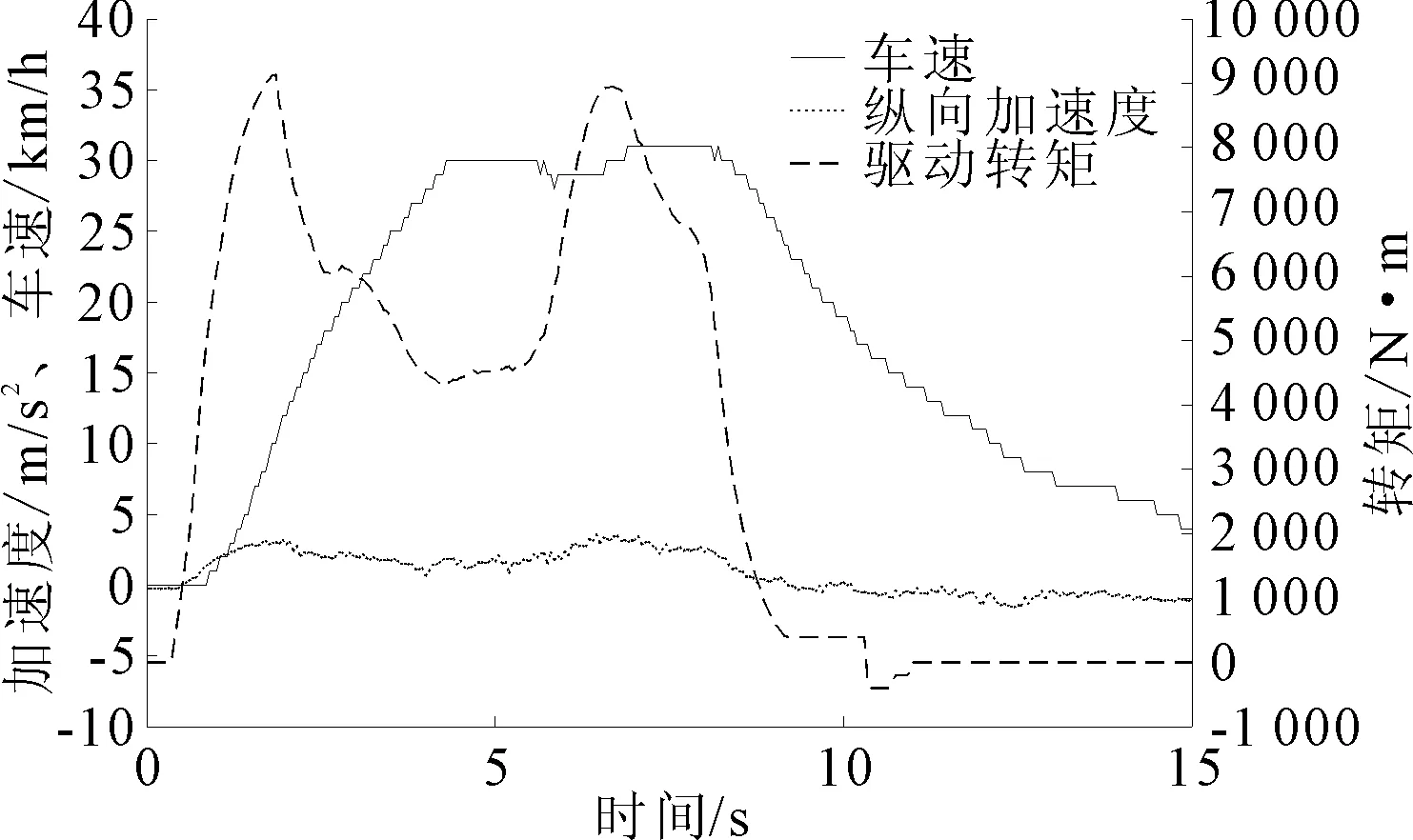
图7 车速、纵向加速度、驱动转矩实时变化曲线图
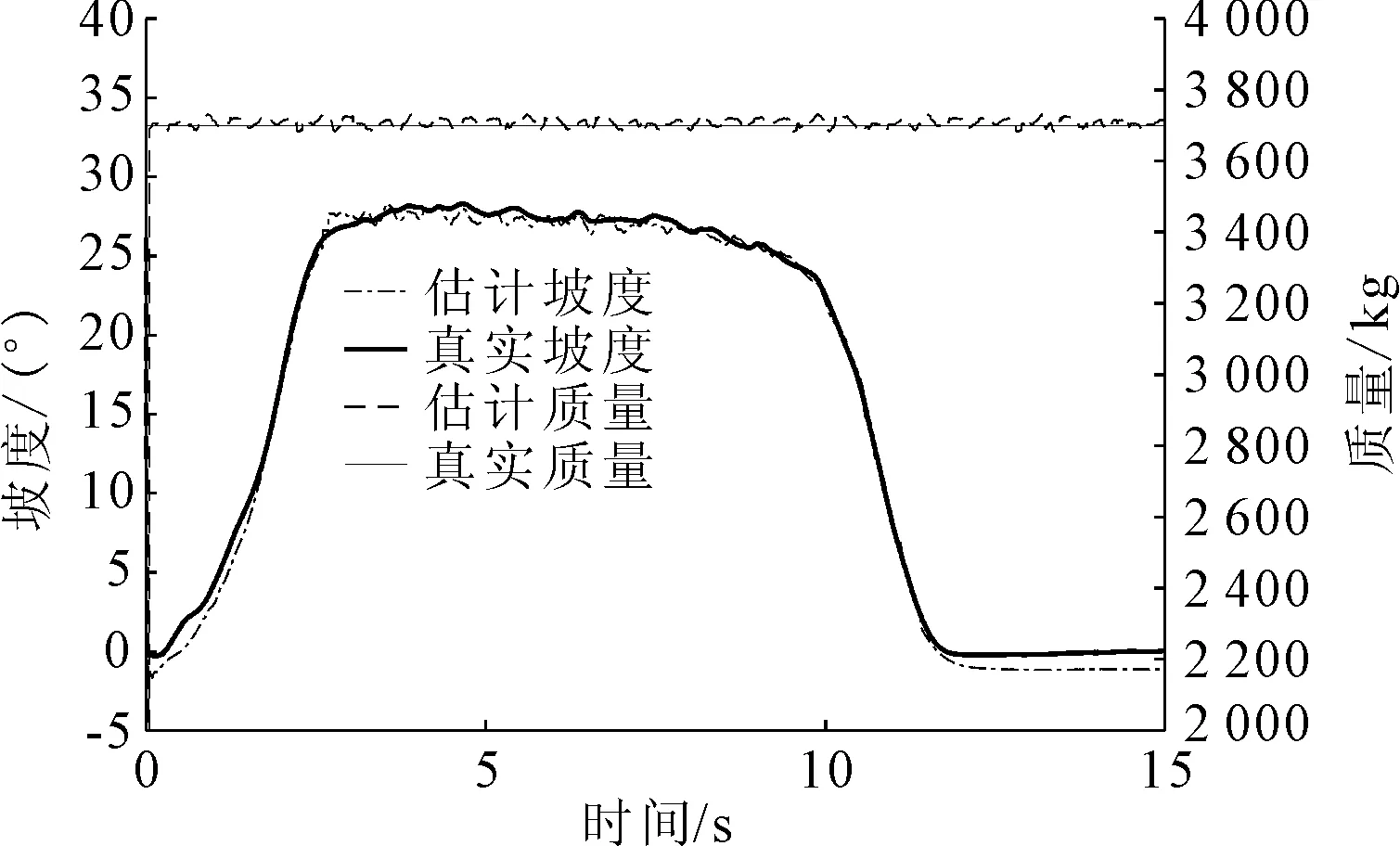
图8 参数估计结果
图7是在26.6°坡道上进行实车验证时,车辆的车速、纵向加速度和驱动转矩等状态参数的实时变化曲线,图8对比记录了车辆的真实质量和估计质量,道路的真实坡度和估计坡度。通过对比分析可知,笔者提出的CRLS参数估计算法可以实现整车质量±30 kg误差的估计效果,在质量估计结果的基础上,所得出的路面坡度估计精度误差在2°以内,并且坡度估计值可以快速跟踪路面真实坡度变化趋势。
参数估计算法在实车上的道路验证试验、与之前的联合仿真结果对比可知,在实车上应用该参数估计算法进行参数在线实时估计时,整车质量的估计精度有所降低,并出现小幅度波动,但并未影响到路面坡度的实时估计效果,坡度估计较好地跟随真实路面坡度变化,并且估计精度与联合仿真估计精度一致。
3 结论
(1)以某型4轮轮毂驱动电动车辆为研究对象,利用轮毂电机车辆驱动转矩和转速易于获取,基于轮毂电机电动车辆纵向动力学模型,提出一种循环递推最小二乘估计算法。将待估参量与其他参量解耦,依次建立路面坡度与整车质量的RLS估计模型,在已知整车质量初值的前提下,进行路面坡度动态估计;进一步将估计的路面坡度作为质量估计模型的输入量,得到准确的整车质量估计值,并且将此质量估计值作为路面坡度估计模型的整车质量输入量,形成了CRLS估计模型。
(2)Carsim与Matlab/Simulink联合仿真结果显示,质量和坡度估计结果可以很快收敛于设定值。同时在实车试验验证环节,通过算法估计结果与车载倾角传感器采集数据实时对比,发现坡度估计值能很好地跟随实际坡度的变化,质量估计值迅速收敛于真实值,验证了笔者提出的包含质量估计最小二乘法与含遗忘因子的坡度估计最小二乘法联合CRLS算法的有效性与稳定性。
猜你喜欢
哈尔滨工业大学学报(2022年5期)2022-04-19
汽车实用技术(2022年5期)2022-04-02
上海涂料(2021年5期)2022-01-15
数学年刊A辑(中文版)(2021年2期)2021-07-17
北京航空航天大学学报(2020年10期)2020-11-14
中学生数理化·高一版(2019年12期)2019-12-31
中国钢铁业(2018年6期)2018-07-26
制造技术与机床(2017年10期)2017-11-28
智富时代(2017年4期)2017-04-27
智富时代(2017年4期)2017-04-27