
基于激光测距无人机的输电线路覆冰厚度测量
2019-12-19 07:24王赫男
应用科技 2019年6期
王赫男
茂名供电局,广东 茂名 525000
输电线路长期处在复杂地形,专业人员日常巡视周期长,线路安全监控难度大,运维环境复杂多变,影响输电系统安全运行的外界因素不断增加,特别输电线路覆冰会严重危害着输电线路地安全稳定运行,故对输电线路的覆冰状况进行有效监测是十分必要的[1−2]。
目前,国内外关于输电线路覆冰厚度的监测方法包括人工巡线、图像识别法[3−6]、弧垂测量法[7−8]、预埋传感器法[9−11]等监测方法。人工巡线无法对现场特殊区域测量,如在高大树木围绕、海拔高的地形或者水库等复杂地形实施起来非常困难,会耗费极大的人力物力。图像识别法需要首先建立输电线路覆冰状况的大数据模型,大雾天气下对图像采集的数据偏差很大[3−6]。弧垂测量法对于档距较小的输电线路的测量精度较低[7−8]。预埋传感器法包括光纤传感器、力传感器和倾角传感器预埋在输电线路上,能够实时准确灵敏地监测线路地覆冰情况,但是该方法的成本较高,不适用于输电线路巡线作业[9−11]。文献[12]提出开发了一套基于光学成像原理和测距原理的便携式测量导线上冰厚的装置,但该方法只适用于中近距离,且只能对一定厚度的覆冰有效地测量。因此,研制一种便捷、快速、高精度且适用复杂地形和天气的输电线路覆冰厚度测量方法是十分重要的。
无人机技术已逐步应用到输电线路运行状态的巡检中,包括应用激光测距技术监测输电线路走廊树障高度,搭载红外测温仪监测输电线路设备的温度状况,以及搭载紫外成像仪监测绝缘子放电状况[13−15]。
本文针对上述局限,并根据输电线路的覆冰情况,提出了将激光测距技术和无人机技术相结合,研究了基于单频测尺的相位式激光测距无人机的输电线路覆冰厚度的测量方法。重点研究了基于激光测距测量覆冰厚度的基本原理;并研制了基于单频测尺的相位式激光测距无人机测量输电线路覆冰厚度的测量系统。最后,在人工气候室和现场实际进行了输电导线覆冰测量,验证了基于单频测尺的相位式激光测距无人机对输电线路覆冰厚度的实际测量有效性。
1 基于单频测尺的相位式激光测距的基本原理
1.1 相位式激光测距
激光相位测距中,对连续的激光信号进行幅度调制,调制信号随时间做周期性变化,测定调制信号返过程中所经过的相位变化即可求出时间和距离,基本原理如图 1 所示[16−17]。

图1 相位式激光测距原理示意
根据基本原理图可知激光信号在传感器和目标的往返时间t为

式中:x为激光发射处与目标的距离;c为激光传播速度。
根据测尺频率f与相位差ϕ的关系可得:
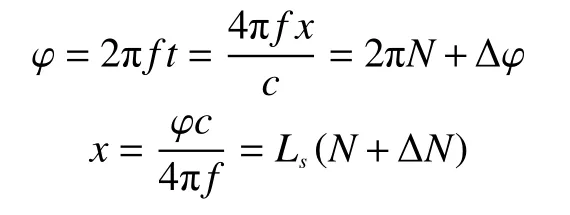
式中:N为完整周期的波数,又称整尺数;Δϕ为不足周期波的余相位;Ls=c/2f为测尺;ΔN=Δϕ/2π为余尺。
1.2 多尺测量方法
通过测量正弦信号相移只能获取余尺数值,而整尺数需要合适的测尺频率来确定。当选取测尺频率较低时,测尺长度稍大于被测距离,可得唯一解。由于测相系统自身存在误差,会导致测距存在误差,且测尺长度越大,测尺频率越低,则测距误差越大。因此,为了解决被测目标距离较大和高精度需求的矛盾,应用多尺测量方法对同一目标进行测量,获取每个测尺的单值解,从而兼顾短尺精度和长尺量程的优点[18−20]。
设定测距系统的测尺量程为10~1 500 m,根据式(1),可得精尺频率和粗尺频率分别为15 MHz和 100 kHz。

1.3 混频降频法
多尺测量法中的精尺频率高达15 MHz,对该信号模数转换器采样模块要求较高。为了在保证相位不变的同时,降低信号的频率,应用混频降频法将信号频率由一个量值变换为另一个量值。
假设在该相位式测距系统中,设由DDS发出的本振信号U0和调制信号U1及APD接收到的回波信号U2分别为:
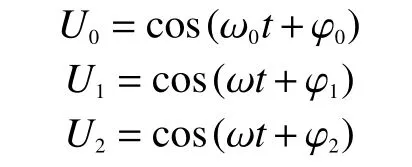
式中:ω=2πf,f为精尺频率,f =15 MHz;ω0=2πf0,f0为本征频率,f0=14.985 MHz;
将调制信号U1和本振信号U0混频
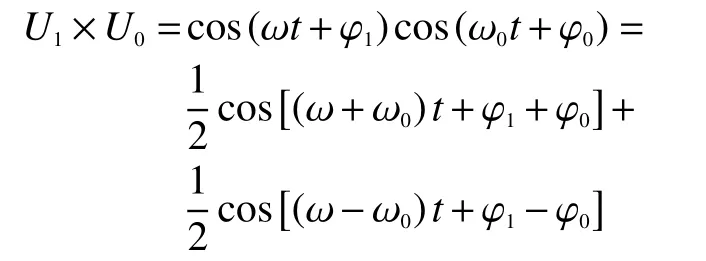
通过低通滤波器可保留低频15 kHz的正弦信号,得到:

同理,可得回波信号U2与本振信号U0混频后的信号:

因此,所得到的混频降频后的信号Us和Ul的相位差为

故混频降频后的信号相位差不变,且频率降低为15 kHz,同理也可以将粗尺频率降低到15 kHz。
1.4 基于单频测尺的相位式激光测距法
基于单频测尺(single frequency ruler,SFR)的相位式激光测距法的基本原理如下:
首先,通过混频降频法将精尺频率和粗尺频率信号降频,在保证相位不变的同时,降低信号的频率,应用单频测尺,以供模数转换器采样。
然后,通过多尺测量法发送精尺频率信号和粗尺频率信号获取整尺数,兼顾短尺精度和长尺量程的优点。
最后,通过测量相位移获取余尺数值,进而获取激光发射处与目标的距离。
2 基于激光测距测量覆冰厚度的基本原理
基于单频测尺的相位式激光测距无人机测量输电线路覆冰厚度的基本原理图如图2所示。基于激光测距的输电线路覆冰厚度检测装置流程图如图3所示。
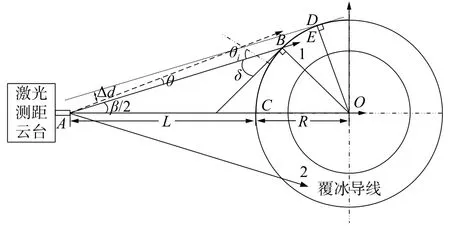
图2 系统测量基本原理
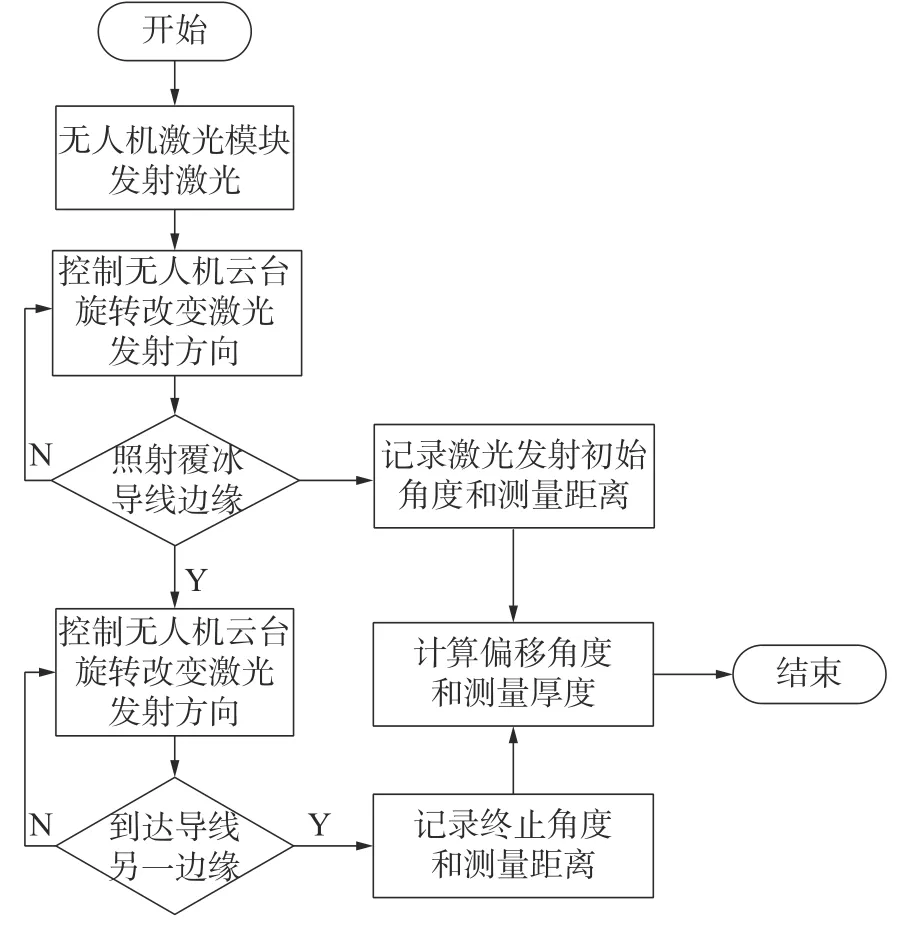
图3 系统测量流程
首先,无人机云台控制搭载的相位式激光测距模块在A点处发射一束激光(波长为λ、功率为Pi、发散角为 θ0),经准直系统后发散角变为 θ,以入射角θi照射到距离为Li的覆冰导线上的B点。然后,以反射系数dρ在覆冰一侧冰面上反射到反射向接收装置,接收距离为位Lr,接收装置接收到的反射功率为Pr。当反射功率等于激光模块的最小工作功率,即Pr=Pmin时,该测量系统此时处于测量临界条件。此时,测量系统恰好能接收到从一侧冰面上的反射激光,记录初始角度和测量距离;最后,云台控制激光射到另一侧冰面,达到临界条件,记录终止角度和测量距离。其中,云台旋转角度 βc=β+θ,测距模块测距距离 L≈Ri。
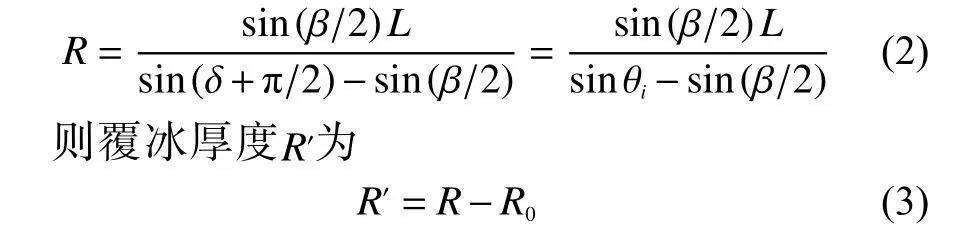
由正弦定理可得覆冰导线的半径R为
当测量系统处于临界条件时,接收装置接收到的反射功率Pr为

式中:Ar为激光照射到的有效面积;AL为激光在传输距离L后的截面面积;RL为激光传输距离L后的截面半径;Tr为接收透镜的透过率;T为激光传输距离L后的透射率;Ti为准直系统的透射率;为反射系数;Ac为接收透镜面积。
在测量系统对覆冰导线的覆冰厚度实际测量时,测量系统的主要参数 Pi、θ、Ti、Tr、Ac、Pmin为已知定值,参数T、L、β可通过测量获取,测量系统的临界条件还与激光照射有效面积Ar有关。
在测量距离和激光透射率一定时,激光光束从覆冰导线截面外到逐渐照射上覆冰导线的过程中,随着照射面积Ar的增加,接收功率Pr增加。当照射面积增加至使检测装置处于临界点时,此时的照射面积可根据照射截距Δd进行计算。如图2所示,当激光照射到B点时刚好处于临界条件,照射截距Δd的表达式为
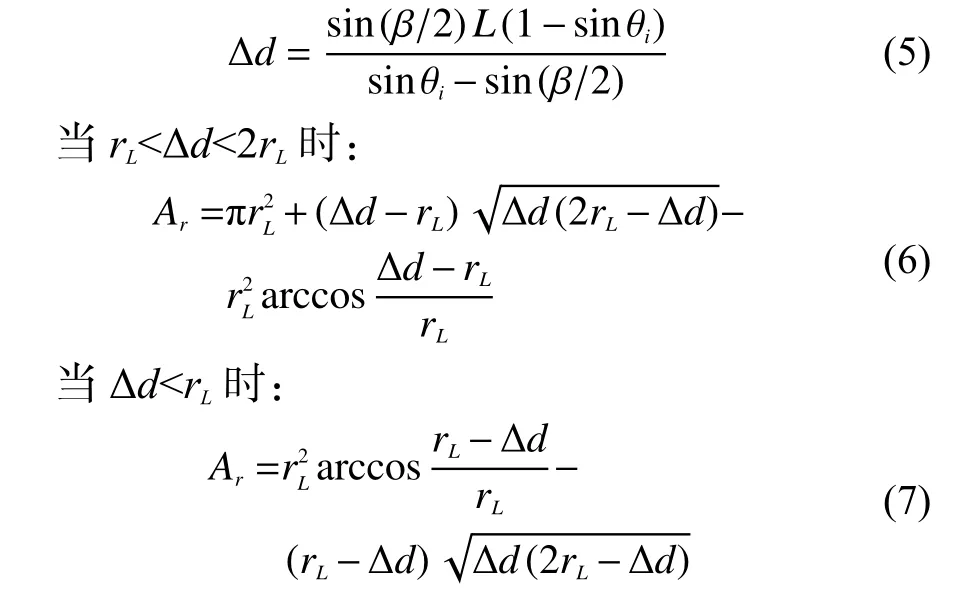
通过不断迭代式(2)~(7),直至反射功率刚大于激光模块的最小工作功率,记录此时的入射角度θi,最后由式(2)即可计算得到覆冰导线覆冰的厚度。
3 测量系统的选型与设计
3.1 总体设计
基于单频测尺的相位式激光测距无人机测量输电线路覆冰厚度的系统硬件主要由大疆M210型无人机、机载云台、相位式激光测距传感器、无焦准直系统、光电探测器、图像采集系统、通讯系统以及地面监控站等部分组成,如图4所示。

图4 无人机测距系统硬件部分
该输电线路无人机激光测距系统软件基于大疆DJI GO4进行二次开发,包括无人机状态显示栏、无人机主界面图传显示、无人机拍摄基本参数设置和无人机测距模式设置及显示等4个模块。该系统支持在Android 4.0及以上和Android Studio 3.1.2上运行,软件主界面如图5所示。
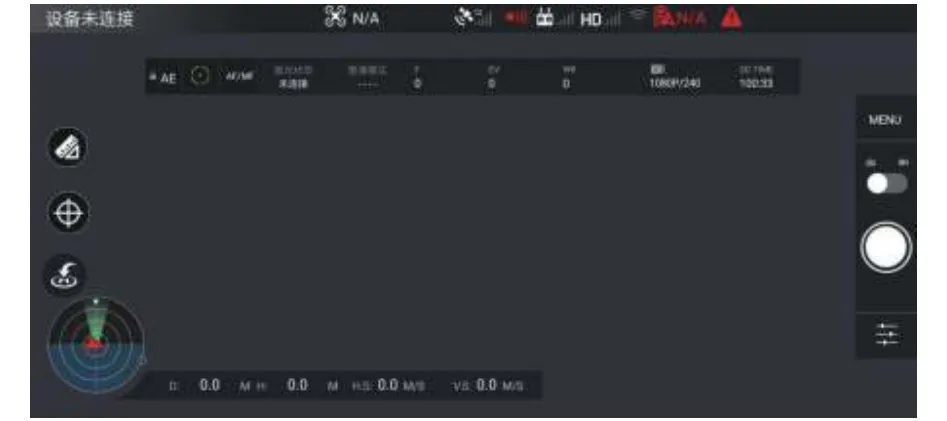
图5 软件主界面
3.2 部件选型和主要参数
无人机作业半径可达7 km,飞行高度可达3 000 m,飞行速度可达 60 km/h,垂直悬停精度为±0.1 m,水平悬停精度为±0.3 m,工作温度为−20~45 ℃。
机载云台下置双云台搭载激光测距传感器和相机,最大俯仰角可达 50°,步进精度为 0.017 5 rad,小于半径测量精度。
相位式激光测距传感器测程最大可达1 500 m,结合SFR技术测量精度可达±2 mm,激光波长635 nm,功率小于 1 MW,最小工作功率为 1.8×10−14,测量时间 0.3~0.8 s。
无焦准直系统使得在最大测量距离内发散角最小,最小可达至 0.1 mrad,透射率为 0.91。
光电探测器选用德国FS−T05,材质为BAK4玻璃,635 nm波段激光的透过率为0.94,接收装置面积为 3.14×10−4m2。
图像采集系统采用高清摄像1080 P,焦距为18~140 mm,自动对焦。
通讯系统包括数传电台和图传电台,数传误码率小于等于 10−6,时延小于等于 25 ms,可传输 1 080 p主相机高清画面,图传时延小于等于300 ms。
地面监控站为大疆M210型电动无人机遥控接收机,自带高清显示屏,可获取各项实时信息。
此外,无人机机身外壳涂有电磁屏蔽材料,提高了电磁抗干扰能力,提高数据传输质量。
4 试验验证与误差分析
4.1 实验室试验
为了验证基于单频测尺的相位式激光测距无人机对输电线路覆冰厚度的实际测量有效性,在人工气候室内进行人工模拟输电导线覆冰测量,选用导线型号为LGJ210/10钢芯铝绞线的测量示意图和覆冰情况分别如图6和7所示。

图6 测量示意

图7 覆冰类型
实验步骤如下:
1)人工气候室使导线产生常见的雨凇、混合凇和雾凇3种覆冰层,并用游标卡尺测量覆冰厚度。
2)人工气候室生成稳定C级雾浓度,使得激光模块的激光透射率为 0.69 m−1。
3)地面控制站控制基于单频测尺的相位式激光测距无人机,使得测量距离为3 m和6 m左右。
4)在2种测量距离下,对3种不同覆冰层的6处不同位置的厚度进行测量,每处位置进行10次测量,取平均值,记录各项参数数值,测量结果如表1所示。
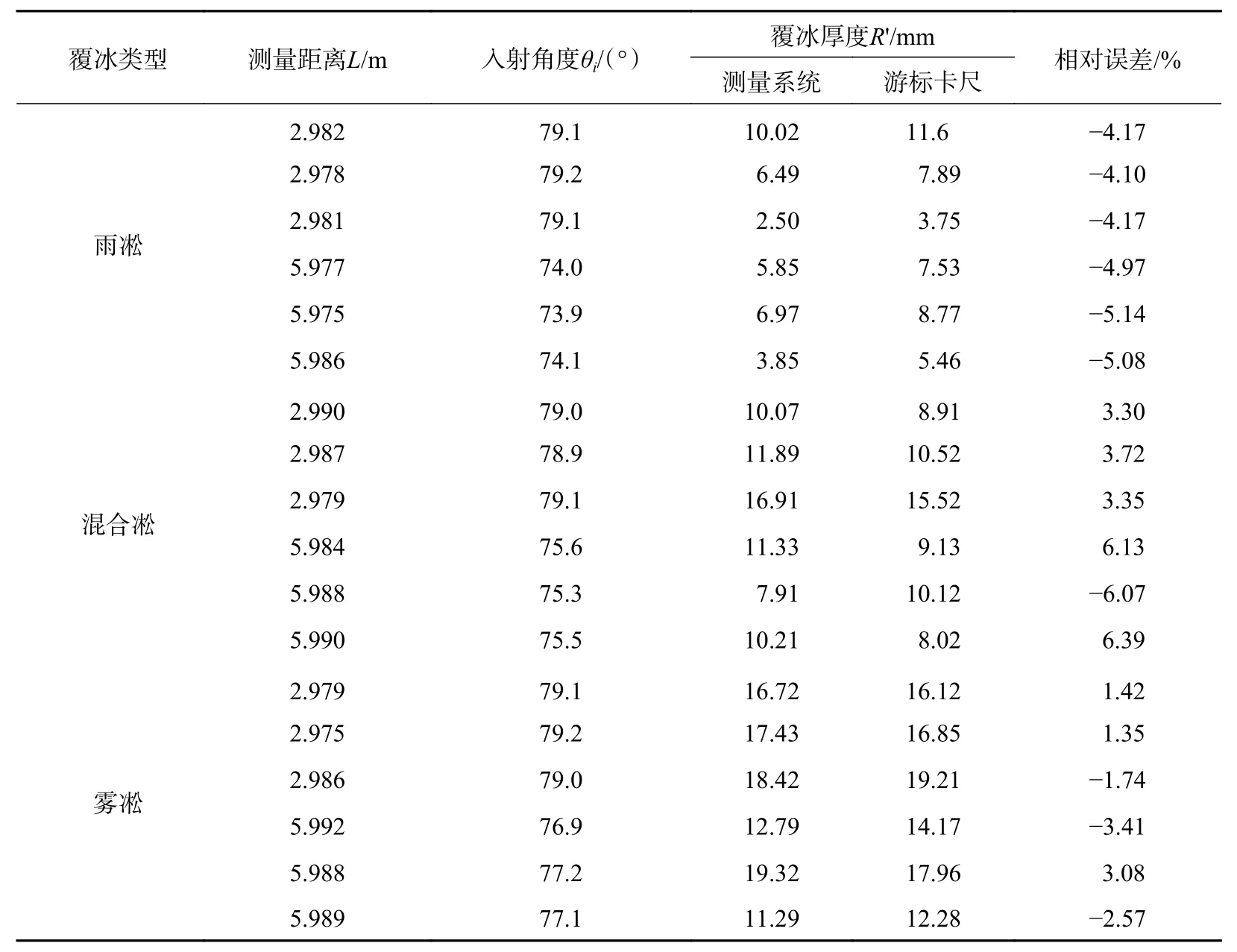
表1 试验结果
从表1可以看出:首先,基于单频测尺的相位式激光测距无人机在气候室实际测量输电线路覆冰厚度相对游标卡尺实际测量的覆冰厚度的误差小于7%。其次,该测量系统随着测量距离的增大,测量相对误差会增大。同时,在对3种覆冰类型的覆冰厚度测量中,测量相对误差是不一样的。测量雨凇冰层时,测量相对误差较大;测量雾凇冰层时,测量相对误差较小。
4.2 现场应用
应用基于单频测尺的相位式激光测距无人机对高寒区茂清一回线的多处杆塔之间的输电线路进行了现场实际测量,现场测量图如图8所示。该输电线路地导线型号为LGJ210/10钢芯铝绞线,外径为19 mm。对该线路的4组杆塔之间3相中段处进行了覆冰厚度测量,测量结果如表2所示。

图8 24#−25#杆塔处覆冰厚度现场测量

表2 高寒区茂清一回线覆冰厚度测量结果

续表
从表2可以看出,同一组杆塔之间的输电线路3相中段的覆冰厚度基本一致。对比表1和表2可以看出,现场实际测量时相较于实验室测量的误差要偏大,相对误差小于14%,但仍满足现场应用要求。
4.3 误差分析
1)测量距离
根据式(2)可知,厚度误差ΔR'与云台旋转角度β和测量距离L相关。由于测量距离远大于被测覆冰导线的半径,因此可以忽略旋转角度β的影响。对式(2)两边同时做微分可得,厚度误差ΔR'与测量距离变化ΔL相关,故随着测量距离的增大,测量相对误差会增大。
2)无人机悬停精度
实际测量时,无人机并不能同固定式测距仪一样固定在空间的一个位置,测量系统应用大疆M210型无人机下视启用时,垂直悬停精度为±0.1 m,水平悬停精度为±0.3 m,这对测量系统达到临界条件时获取的入射角度θi有一定的影响,进而产生测量相对误差。
3)覆冰类型
雨凇、混合凇、雾凇3种覆冰类型的冰层的表面粗糙度是不一样的,因此激光在不同覆冰类型的冰层表面的反射特性是不一样的,这对测量系统达到临界条件的影响是不同的,从而导致测量系统对不同覆冰类型的测量相对误差也是不一样的。
5 结论
1)研究了基于单频测尺的相位式激光测距法。将多尺测量法和混频降频法应用到相位式激光测距法,在保证相位不变的同时,降低信号的频率,兼顾短尺精度和长尺量程的优点,测量相位获取激光发射处与目标的距离,提高了激光测距的精度和测量速度。
2)研究了基于激光测距测量覆冰厚度的基本原理,推导了激光测量距离与覆冰厚度之间的计算方法。
3)研制了基于单频测尺的相位式激光测距无人机测量输电线路覆冰厚度的测量系统。在人工气候室内,应用基于单频测尺的相位式激光测距无人机,对人工模拟覆冰输电导线的覆冰厚度进行了测量。研究结果表明,该测量系统能够有效地对输电线路覆冰厚度进行测量性,相对误差小于7%。
4)对高寒区茂清一回线的多处杆塔之间的输电线路进行了现场实际测量,现场实际测量时相较于实验室测量的误差要偏大,相对误差小于14%,满足现场测量要求。相对误差主要与测量距离、无人机悬停精度、覆冰类型有关。
猜你喜欢
建材发展导向(2022年6期)2022-04-18
昆明医科大学学报(2021年6期)2021-07-31
科学(2020年5期)2020-11-26
中华诗词(2019年8期)2020-01-06
传媒评论(2019年7期)2019-10-10
小哥白尼(趣味科学)(2019年2期)2019-04-17
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
西安建筑科技大学学报(自然科学版)(2016年1期)2016-11-08
儿童故事画报·发现号趣味百科(2016年3期)2016-06-24
