水面救助机器人的设计与应用前景
2019-12-16 08:16朱海涛
中国水运 2019年11期
关键词:系统设计
朱海涛


摘 要:以习近平为主导的科技强国方针遍布全国。交通运输部北海救助局响应党的号召,开始步入新技术新装备的研发与采购,以新型的救助装备--水面救助机器人为例,其设计理念为增加救助效率,减少救助成本与风险,并弥补传统救助的缺陷;介绍该设备的开发设计原理,主要从外形结构、控制系统、推进系统以及操控系统上进行设计研究,再根据救助方面的实际情况对其应用展开分析,以说明该设备的实用性。
关键词:水面救助机器人;系统设计;动力舱;控制舱;遥控台;
中图分类号:TP242 文献标识码:A 文章编号:1006—7973(2019)11-0064-03
中国黄渤海域每年因船舶事故或天气原因导致船员落水身亡的人数居高不下,例如2017年1月11日,在距北海三号位东北约75海里处,运砂船“平安98”轮机舱失火,因为火势太大,救助船舶无法靠近,只能利用消防炮进行远程灭火降温,船上14人遇险身亡。为了能在特殊环境下对难船人员进行可靠的施救,需研发一种海面救助设备以减少救助风险与成本;并且便于操控,还能适应大风浪天气的下航行,其动力要强劲,机动性能良好,此外要具备一定的防水性能。针对以上条件,开展基于远程遥控的水面救助机器人(见图1)的研发设计,为传统救助船舶的救助提供有利技术支持与装备保障。
1 水面救助机器人的设计
1.1水面救助机器人的整体结构的设计
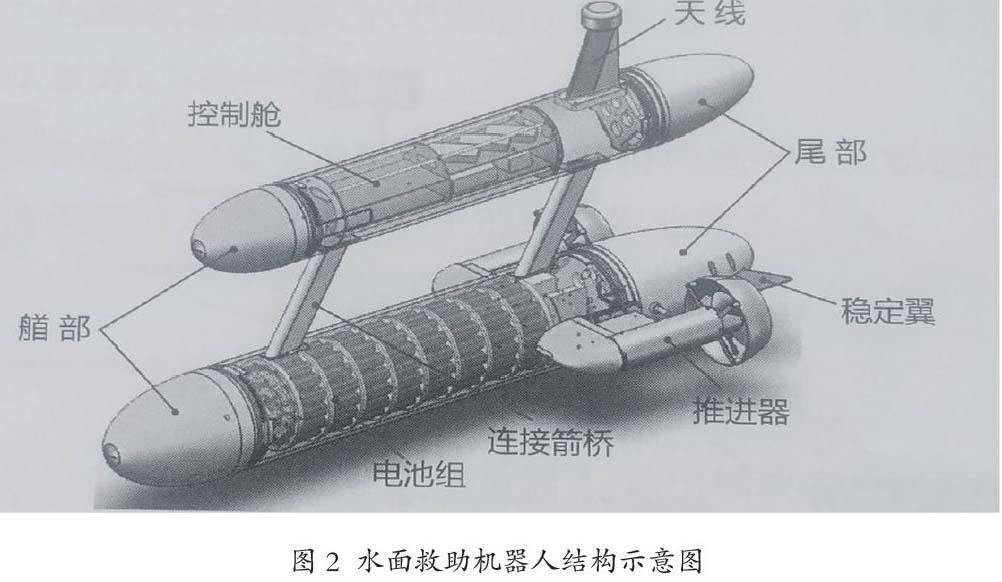
(1)外形结构设计。根据流体力学的原理,为了减小其水中的阻力,其载体的外形采用鱼雷的设计理念[1],艏艉部采用圆锥形设计方案,中间整体结构采用圆柱形外壳。为了兼顾载体在水中的浮力与电池的容量配重,采用双舱室结构,动力舱与控制舱(见图2),动力舱是浸没在水里,控制舱是露在水面的,两舱室通过箭桥进行连接,动力舱包括电池舱与推进系统。推进系统包括推进器与稳定翼,推进器采用双定矩螺旋桨与同步电机,为载体提供充沛的动力以及转向,稳定翼可保持机器人载体在水中航行时稳定不偏移。控制舱与天线组合在一起,并在控制舱艏部安装一个频闪的指示灯,为夜间救助提供便利;在控制舱的中间增加一个半圆形挂钩,为方便释放回收机器人做准备。
(2)结构材料与密封设计。为减轻机器人的重量来提高浮力与机器人本身的强度,采用航空铝材料作为机器人的机身外壳。在密封方面,壳体采用无缝焊接技术,艏艉可拆卸部分采用螺纹罩加橡胶密封圈结构,在充电口出,采用细螺纹螺丝帽加橡胶密封圈结构(见下图3)。整体外壳采用高度防水防腐蚀密封漆,并采用多道喷漆工艺。
1.2控制系统的设计
控制舱作为机器人载体的大脑,设计要求内部器件重量轻,整体密度较小,为整个机器人载体提供浮力。其内部搭载电源转换模块、主控模块、通讯模块、定位模块等,如下图4。
负责与控制台的通讯,推进器的调速,接受GPS位置信号等,是机器人载体的通信、控制核心。包含由无线通讯、数字量输入/输出模块与模拟量输入输出模块等构建的控制系统;利用主控制模块的信息处理能力接受控制台发来的载体推进器控制命令,对载体前进、后退、左转、右转等操作的控制信息进行处理,并将电池状态信息、GPS信息、串口通讯状况等发给控制台从而达到控制整个载体的目的,其具体关系如下图5。
主控系统采用嵌入式设计方案,可灵活对功能进行个性化管理,方便以后增加功能。对于该系统采用开环设计模式,主控模块根据操控台发出来的指令信号进行处理并发送两路PWM信号给推进系统,最后由推进系统的变频放大模块控制左右两螺旋桨电机的转数与转向来实现机器人的前进、后退与转向功能。
1.3电源系统的设计
动力舱占据了整个机器人载体的大部分重量,其内部电池舱的高密度电池系统为载体提供静态稳性,电池为高密度的磷酸铁锂电池组,其设计容量约为1.8kwh,且满负荷的续航时间不低于3小时;与其配套的电池组管理单元要满足300V的升压整流电压。为了满足装配需求,须把电池组设计成圆柱形(见下图6),在电池舱外面设计一个水密充电头,平时充电时,拧开水密旋钮盖(类似矿泉水瓶盖),可以接入350V5A的充电器。
1.4推进系统的设计
推进系统作为整个机器人载体的动力核心,其螺旋桨采用四叶片定矩桨结构,动力电机的转速可线性调节,设计单机最大功率为500W的同步电机。要满足在静水状态下带缆航行时,最大设计航速不低于4.5节,系桩设计拉力不小于35Kg。为了避免缆绳缠绕到螺旋桨,在螺旋桨前后安装了网状格栅。稳定翼采用两片不锈钢板镶嵌在动力舱的艉部,其外形做成鱼鳍状,促使载体在水中前进时更加竖直平稳。
1.5遥控系统的设计
遥控系统设计为可移动式控制台(简称遥控器),操作人員可以随身携带,对机器人载体进行远程操控。遥控器是一个由无线通讯、数字量输入/输出模块与模拟量输入/输出模块等构建的控制系统;利用操控杆及开关实现了载体推进器的开关,载体前进、后退、左转、右转等操作的控制与对电池信息、GPS信息、串口通讯状况以及电池状态的监视等,具体控制台反馈信息如下表1。遥控器的操作在控制面板上完成,控制面板布局如下图7。
遥控器的内部硬件部分的主要划分为:电源模块(24VDC电池与24VDC-5VDC电源转换模块)、主控模块、Xtend无线通讯模块、显示屏、三轴摇杆等。电源模块为其他模块提供电源,主控模块采集操作手柄的控制信号,通过控制台上的无线通信模块在载体发送指令,载体将采集到的载体电池信息、GPS信息、状态信息等通过载体的无线通信模块向控制台发送,由显示模块进行综合信息显示,其模块关系如下图8。
Xtend无线通讯模块为美国DIGI的远距离射频模块,(见图9),采用FHSS(调频扩频)技术,具有良好的抗干扰性;设置该模块的工作频段为ISM900M,搭配RPSMA接口型天线的数据吞吐量高达115.2kbps[2],足以满足机器人的数据传输能力;在功耗方面表现出优异的成绩:1mW-1W,并且根据自身要求可以通过软件进行调整;Xtend具有超远的传输距离的能力,通过增加高增益天线在户外无遮挡的情况下最远可以达到65公里。
2 水面救助机器人的应用前景
2.1人员救助
当人员落水后,通过遥控器操控机器人拖带救生圈、救生衣与救生艇等到水面遇险人员附近实施救助。
2.2 带缆功能
在恶劣天气下,船舶摇晃较为剧烈,传统的打撇缆的方式无法准确击中难船,可以通过释放机器人快速拖帶缆绳到难船附近,实现对难船及时就行拖带作业,创造进一步救援条件。
2.3 可用于礁石、浅滩以及狭窄水域等特殊水域下救援
救助机器人的外形最大尺寸仅为1500mm(长)*650mm(宽)*750mm(高),结构灵活小巧能满足大型船舶或救助艇无法到达的特殊水域下救助。
2.4 降低救助风险与成本
救助机器人可用于高危海域下的救助,如起火的油轮,溢油的船舶。发生火灾的油轮有爆燃的风险,如果救助人员冒然前往救援,会增加救助风险,救助船舶用消防炮一边进行远程洒水冷却,然后一边配合救助机器人前往失火油轮进行人员救助转移。既减少人员伤亡的风险,同时又降低了救助的经济成本[3]。
2.5 具有较强的抗风浪能力
根据其结构特点,可以做到与鱼雷一样在水中穿梭,即使恶劣的风浪环境,也能正常航行,加上强劲的动力,能够在较短的时间内到达目标位置,为救援争取时间。
3 结束语
本文针对船舶在特殊环境下无法进行科学施救的情况下研制出一款可以代替传统人力救助的水面救助机器人。并对系统的设计进行详细的分类说明,并对24VDC-5VDC电源转换模块进行详细的计算分析,最后对其应用进行了合理分析,突出该设备的应用价值。由此得出以下结论:
(1)通过海上一个月的实测,满足海上实际特殊环境的应用的要求,在其机动性能与防水防腐蚀性能上表现出优秀;在操控性能上方面,表现良好,由于机器人的自身大小的限制,在远距离遥控时,仍难把握其方向,可能需要增配无线摄像头来弥补这一缺点。
(2)水面救助机器人使用范围广,不仅可以用于救助,还可以用于勘测,水面拍摄等其他应用,也为其他海上新型救生设备研发提供有利的参考价值。
参考文献:
[1] 王鹏,宋保维等.鱼雷外形多科学设计优化与仿真[J].系统仿真学报.2008.20(7):1915-1916
[2] linhaixiang. 5公里无线数传电台设计[J/OL]. 百度文库.2012-06-28.https://wenku.baidu.com/view/94646218650e52ea5518982e.html
[3] 王全杰,郑州.无人救助艇的功能性应用及技术展望[J].航海技术.2018.6:
猜你喜欢
电脑知识与技术(2016年26期)2016-11-25
电脑知识与技术(2016年26期)2016-11-24
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年22期)2016-10-18
企业导报(2016年6期)2016-04-21
科技视界(2015年25期)2015-09-01