
基于概率核模糊聚类剪枝的工业机器人在线控制研究
2019-12-13 07:22徐淑琼陈升平潘文炜
数字技术与应用 2019年9期
徐淑琼 陈升平 潘文炜

摘要:本文提出了基于概率核的工业机器人模糊聚类样本选择方法,实现对工业机器人控制过程大样本数据的剪枝处理,减少了进入支持向量回归学习样本数目,以解决工业机器人在线控制学习效率偏低的问题。实验结果表明,该方法改善了工业机器人在线控制在鲁棒性、跟踪精度和快速性等方面的综合性能。
关键词:概率核模糊聚类;最小二乘支持向量回归;在线控制
中图分类号:TP242 文献标识码:A 文章编号:1007-9416(2019)09-0001-03
0 引言
工业机器人正在各行各业中发挥着重要作用,深刻影响着人类的生活。机器人控制技术是影响工业机器人系统性能的关键部分,已成为目前工业机器人领域研究的热点和难点,尤其是在线控制方法的研究[1]。然而,在线控制过程不可避免存在的随机信息和模糊信息,制约着机器人在线控制的性能,如何对信息进行有效的分析和处理,是机器人控制急须解决的一个难题。
核聚类分析是数据处理的一种常见的技术[2-3]。在核聚类方法中,核函数的设计对于传统核聚类方法是至关重要的。核函数体现了从原始输入空间到高维特征空间的非线性映射关系。当系统存在不确定信息时,由于原始输入空间到高维特征空间的非线性映射关系非常复杂,传统核函数不能很好的体现两者间模糊的非线性映射关系。本文将研究概率模糊核函数,利用多论域的核结构改善这个问题。作为传统核函数的扩展,概率模糊核函数可以看作传统核函数的集合,以确保它具有多种核函数的优越性能。研究设计多论域核函数的主概率函数和次模糊隶属度函数,对每种核函数赋予不同的主概率函数和次模糊隶属度,将有利于获取概率模糊核函数的综合性能,并应用于实际工程问题。
本文首先提出概率核-模糊聚类工业机器人样本选择方法对工业机器人在线控制过程的大样本数据进行合理剪枝运算,减少支持向量回归学习样本数目[4-5],以解决工业机器人在线控制学习效率偏低的问题。研究建立基于最小二乘支持向量回归的工业机器人在线控制模型,结合支持向量机理论、逼近原理和自适应调整机制,在保障快速性的同时,提高了机器人在线控制的精度,实现工业机器人在线控制的鲁棒性、跟踪精度和快速性的综合平衡。
1 工业机器人在线控制算法
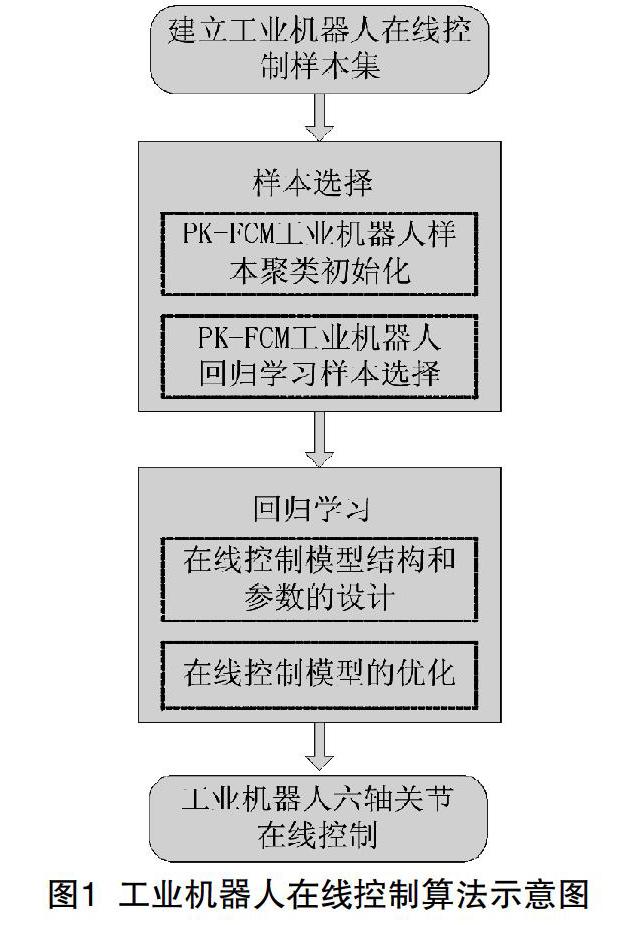
本文所提出的工业机器人在线控制算法如图1所示,主要有以下几个步骤:
(1)工业机器人训练样本集的建立:利用工业机器人在线控制过程中历史已有的大样本数据建立工业机器人在线控制训练样本集;
(2)工业机器人回归学习模型的样本选择:利用本文所提出的概率核模糊聚类方法来进行样本的剪枝运算,首先应当对概率核模糊聚类方法的参数进行初始化设置,在此基础上,通过聚类算法来选择进入在线控制模型回归学习的样本;
(3)在线控制模型的回归学习:须先对工业机器人在线控制模型的结构和参数进行合理的设计,然后再进一步對模型进行优化和求解,得到训练好的工业机器人在线控制模型;
(4)利用训练好的工业机器人在线控制模型可实现对六轴工业机器人运动轨迹的在线控制。
下面将给出工业机器人在线控制模型样本选择和学习回归两个关键环节的具体设计过程。
1.1 工业机器人在线控制训练样本集的选择
2 实验验证
为提高工业机器人在线控制的有效性,本文提出了基于概率核的工业机器人模糊聚类样本选择方法,实现对工业机器人控制过程大样本数据的剪枝处理,减少了进入支持向量回归学习样本数目,解决了工业机器人在线控制学习效率偏低的问题。下面给出基于概率核模糊聚类剪枝的工业机器人在线控制方法的具体实现步骤:
(1)基于概率核模糊聚类剪枝的工业机器人在线控制支持向量机模型样本集的建立:利用工业机器人现场已有的历史数据,建立工业机器人最小二乘支持支持向量回归在线控制模型训练所需的数据集。
(2)基于PK-FCM的工业机器人样本选择:在这里,我们引入概率模糊核,关键是对概率模糊隶属度的有效设计。在这里,我们对本文所提出概率模糊聚类中的概率模糊核函数的设计,可参考文献所涉及的方法[6]。利用模糊聚类方法的寻优步骤可对工业机器人的样本进行选择,得到最终进入训练模型的样本集。
(3)工业机器人最小二乘支持向量回归在线控制模型的训练:利用已建立的工业机器人最小二乘支持向量回归在线控制模型的训练集,可对工业机器人最小二乘支持向量回归在线控制模型进行训练,得到工业机器人最小二乘支持向量回归在线控制模型如式子(5)所示。
(4)工业机器人最小二乘支持向量回归在线控制:利用已经训练好的最小二乘支持向量回归在线控制模型,可实现对工业机器人的在线控制。
为验证本文所提出的基于概率核模糊聚类剪枝的工业机器人在线控制算法的有效性,我们将其跟传统的模糊核聚类剪枝方法进行对比,并对工业机器人的轨迹跟踪性能进行测试,图2a-c给出工业机器人对应三个关节(从第一关节至第三关节)的轨迹运动位置跟踪误差,不同类型曲线分别对应传统模糊核聚类剪枝方法和概率核模糊聚类剪枝方法的轨迹跟踪误差。
为验证工业机器人的在线控制的各项性能指标,各关节尽量以较大的范围进行工作,运动时间设定为8秒,在保证起始点和终点速度,加速度连续的前提条件下进行关节空间的运动根轨迹规划。如图2所示,不同类型曲线分别对应传统模糊核聚类剪枝方法和本文所提出的概率核模糊聚类剪枝方法的轨迹跟踪误差。我们可以看到,本文所提出的概率核模糊聚类剪枝方法相比传统模糊核聚类剪枝方法,得到了较好的结果。
3 结语
本文结合支持向量机理论、概率模糊理论和自适应调整机制,首先提出概率核-模糊聚类工业机器人样本选择方法对工业机器人在线控制过程的大样本数据进行合理剪枝运算,减少支持向量回归学习样本数目,进一步采用最小二乘支持向量回归实现工业机器人的在线控制,得到了较好的效果。实验结果表明,该方法相比传统聚类及模糊聚类方法,能够有效提升工业机器人在线控制运动轨迹的精度。该方法能够在工业机器人在线控制的鲁棒性、跟踪精度和快速性方面取得折衷。
參考文献
[1] 蔡自兴.机器人学,第2版[M].北京:清华大学出版社,2009.
[2] 梁海英,许昕,潘宏侠,付志敏,等.基于EEMD与模糊核聚类的供输弹系统早期故障识别[J].机械设计与研究,2019,35(1):192-194.
[3] 陈育才.基于模糊聚类的多传感器遥感图像海岸线提取方法[J].测绘地理信息,2019:16-19.
[4] Xu S, Liu Z, Zhang Y.Least Squares Support Vector Regression and Interval Type-2 Fuzzy Density Weight for Scene Denoising [J].Soft Computing,2016,20:1459-1470.
[5] Xu S.Effective T2FPSO-Based T2FSVM Scene Classification Algorithm [J].系统仿真学报,2016,28(12):2925-2938.
[6] Liu Z, Xu S,Chen CL.A Three-Domain Fuzzy Support Vector Regression for Image Denoising and Experimental Studies [J]. IEEE Trans. on Systems,Man,and Cybernetics Part C,2014,44(4):516-525.
Abstract:A sample selection method of fuzzy clustering for industrial robot was presented based on the novel probabilistic kernel, which would reduce the number of learning sample for support vector regression model and realize the pruning processing of scale sample data in the procedure of industrial robot control, also to regarding the problem of low efficiency of learning of online control. The experimental results show that the proposed method would improve complication performance of the robustness, the tracing accuracy and the rapidity of online control for industrial robot.
Key words:Probabilistic Kernel Clustering; Least Square Support Vector Regression; Online Control
