
一种空间机器人在轨抓捕过程的柔顺与协调控制方法
2019-12-12 03:04
军民两用技术与产品 2019年11期
申请人:北京空间飞行器总体设计部
发明人:葛东明、王大轶、邹元杰、柳翠翠等
专利号:201710179450.5
简介:本发明公开了一种空间机器人在轨抓捕过程的柔顺与协调控制方法,包括:根据动力学和运动学方程,建立面向控制的空间机器人模型;根据面向控制的空间机器人模型,建立机械臂柔顺抓捕控制律;确定基于基座喷气装置的基座位姿控制律;根据机械臂柔顺抓捕控制律,建立机械臂柔顺控制回路;根据所述基座位姿控制律和PSR伪速率脉冲调制器,建立基座位姿控制回路;将所述机械臂柔顺控制回路和基座位姿控制回路计算得到的控制量分别作为空间机器人系统的机械臂和基座喷气装置的控制输入;同时,将基座的控制力作为前馈项,输入给机械臂控制律,以补偿基座控制对机械臂末端柔顺控制的干扰。本发明在实现对目标的稳定抓捕的同时保证了基座的稳定性。
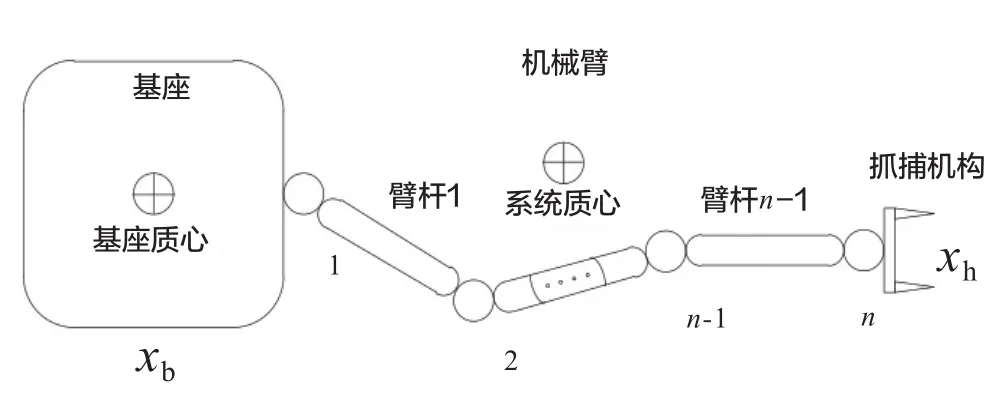
▲空间机器人示意图
猜你喜欢
水上消防(2022年1期)2022-06-16
小天使·聪聪画刊(2021年3期)2021-09-10
民用飞机设计与研究(2019年2期)2019-08-05
设计(2019年8期)2019-05-20
中国知识产权(2017年11期)2017-11-21
科学与财富(2016年29期)2016-12-27
科技创新导报(2016年20期)2016-12-14
中国化妆品(2014年5期)2014-09-15
中国信息化·学术版(2013年4期)2014-01-03
读者·校园版(2013年22期)2013-05-14
