多无人机在组网雷达中的虚假目标轨迹生成*
2019-12-11 02:23孙晓丽李艾静
通信技术 2019年12期
秦 蓁,周 昆,孙晓丽,李艾静,2
(1.中国人民解放军陆军工程大学 通信工程学院,江苏 南京 210007;2.上海交通大学 电子信息与电气工程学院,上海 200240)
0 引 言
为了能对组网雷达实施有效干扰,现在可利用多架无人机对组网雷达进行协同干扰。如图1所示,无人机搭载的干扰设备对接收到的雷达信号进行相应处理后转发回对应的雷达,雷达接收到转发回的干扰信号形成目标轨迹点信息,传输至组网雷达信息融合中心[1]。由于多无人机的协同飞行,因此在融合中心就会出现多部雷达在统一坐标系的同一空间位置上检测到目标信号,基于一定的融合规则就会判断为一个合理的目标轨迹点,多个连续的合理目标轨迹点就形成了目标轨迹,即实现了一条虚假轨迹。通过协同控制无人机的飞行轨迹,可在敌方的组网雷达系统中形成一条或多条欺骗干扰轨迹,迫使敌方加强空情处置,达到欺骗目的[2]。
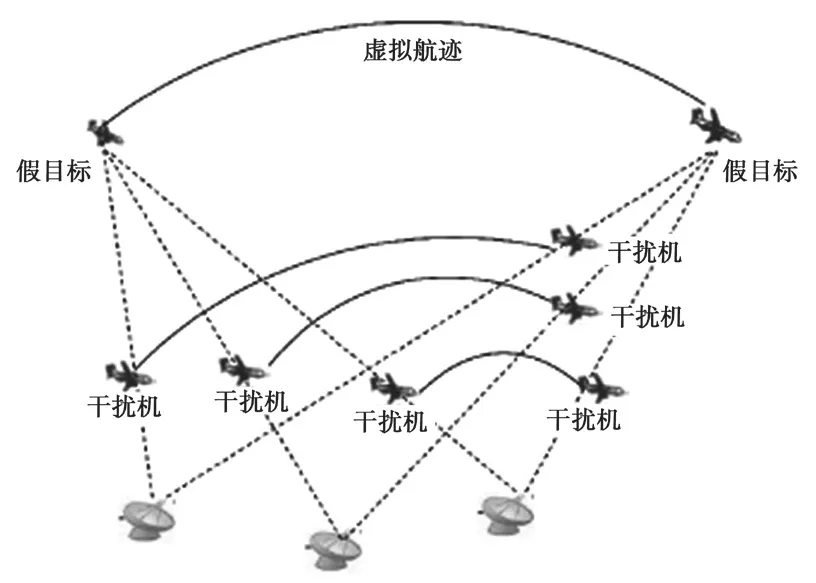
图1 多无人机协同干扰组网雷达系统
鉴于无人机的RCS较小,也采用了若干隐身技术,在距雷达一定距离飞行时,真实目标产生的回波不能被雷达有效检测;干扰设备产生的欺骗干扰信号经过了放大增强环节,能保证被雷达有效检测到。每架无人机均搭载有干扰设备,可独立工作。同一时刻一架无人机只能干扰一部雷达,但可在该部雷达接收机终端(雷达屏幕上)产生多个目标点,这些目标点均位于雷达与无人机连线以及延长线上,距雷达距离超过150 km的假目标信息直接被雷达系统删除;同一时刻多架无人机可以干扰同一部雷达。雷达同一时刻接收的多个目标点的状态信息均同时传送到信息融合中心。每架无人机不同时刻可干扰不同雷达。同一条轨迹不同时刻的轨迹点,可以由组网雷达系统中不同的三部雷达检测确定。如何利用多无人机对组网雷达实施距离假目标欺骗的关键就是能否生成有效的虚假目标轨迹。本文致力于研究如何利用最少数量的无人机生成设定的虚假目标轨迹,从而对组网雷达实施有效的干扰。
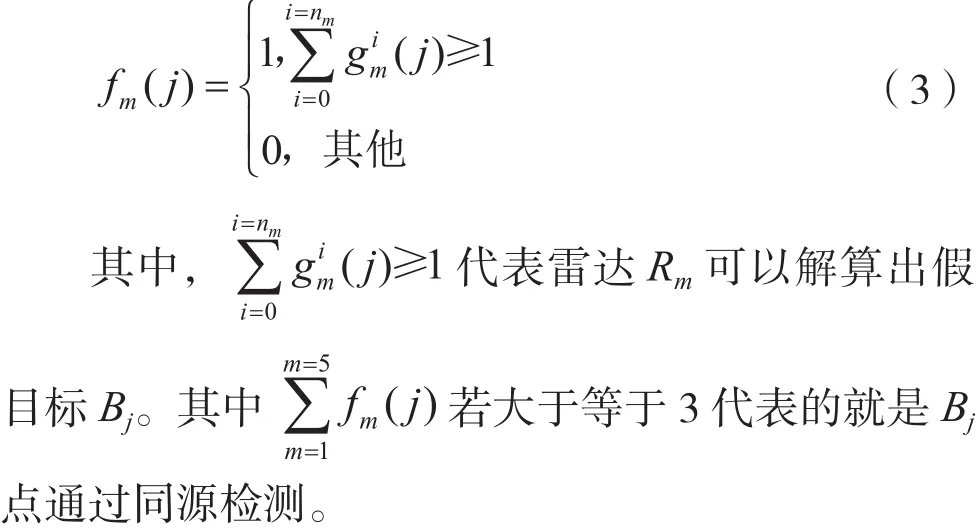
本文主要考虑5部雷达组成的组网雷达系统。在该系统中,雷达将检测到的回波信号经过处理后形成轨迹点状态信息传输到融合中心,融合中心对多部雷达获取的目标状态信息进行“同源检验”,只要有3部以上雷达的轨迹点状态信息通过了同源检验,即至少有3部雷达同一时刻解算出的目标空间位置是相同的,融合中心就将其确定为一个合理的轨迹点[3]。在实际应用中,多个连续的虚假轨迹点相连才能形成一条合理的虚假目标轨迹。我们设定20个连续的经融合中心确认的轨迹点形成的合理轨迹,其被组网雷达系统视为一条真实的目标轨迹。所谓合理的轨迹是要满足相应的目标运动规律,无论是运动速度还是转弯半径等均应在合理的范围内。本文主要考虑无人机做匀速直线运动,对组网雷达实行距离假目标欺骗干扰[4-5]。
1 问题分析
在20个连续时刻,每个时刻至少有3部雷达根据无人机位置解算出的目标空间位置是相同的,形成已知的20个虚假轨迹点(如表1所示)。

表1 虚假目标轨迹点
本文的主要目的是在完成表1所示的虚假目标轨迹的前提下最小化无人机数量,并且求得每架无人机的运动规律。该问题的难点是要想减少无人机的使用数量,就要求一架无人机尽可能多的参与形成虚假目标轨迹,即无人机在限定高度范围内做匀速直线运动时尽可能多的穿过雷达与假目标的连线,这样才能最大限度的减少所使用的无人机的数量。本文的优化目标是最小化无人机数目,约束条件是无人机的运动方式和欺骗干扰要求。通过分析,其解决思路如图2所示。

图2 本文求解思路
2 模型建立
本文假设组网雷达系统由5部雷达组成,雷达最大作用距离均为150 km,也就是只能对距雷达150 km范围内的目标进行有效检测。5部雷达的地理位置坐标分别为雷达1(80,0,0),雷达2(30,60,0),雷达 3(55,110,0),雷达 4(105,110,0),雷达5(130,60,0)(单位:统一为km)。该问题的优化目标是在生成给定虚假目标轨迹的前提下,最小化无人机数目。因此,目标函数可以表示为:

其中,无人机总数量为N,问题优化变量是雷达Rm使用的无人机个数nm以及每架无人机的路径Si。
根据实际任务要求,约束条件主要包括:
(1)无人机速度限制,例如每架无人机的速度限制在120 km/h-180 km/h;
(2)匀速运动,每架无人机的加速度为零;
(3)高度限制,例如无人机的飞行高度限制在2 000 m-2 500 m;
(4)直线运动,无人机路径中的点要满足同一个空间直线方程;
(5)无人机间隔距离限制,任意两架无人机之间的距离应该大于100 m;
(6)任务要求限制,每个虚假目标至少由3部雷达同一时刻解算出来的位置融合而成。
约束条件(1)~(5)主要是约束每架无人机的运动方式,主要对决策变量Si起约束作用,约束条件(6)主要是要求无人机至少能够完成所要求的任务,主要对决策变量nm,1≤m≤5起到约束作用。
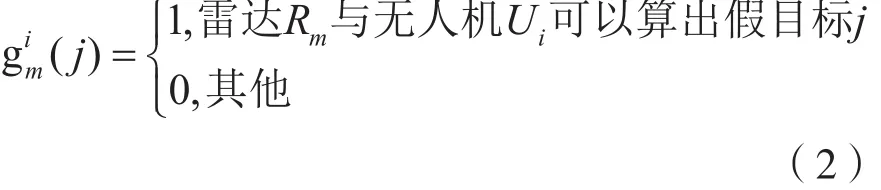
定义一个二进制变量gim(j)来表示无人机Ui,i∈(1,N)和雷达Rm,m∈(1,5)能否解算出假目标j:
同时,定义一个二进制变量fm(j)来表示雷达Rm与无人机Ui对假目标Bj的同源检测结果:
综上所述,优化模型可以表示为:
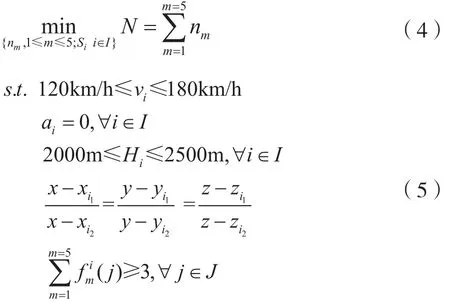
在无人机匀速直线运动规律以及运动范围的约束下,最小化生成虚假目标轨迹的无人机数量。极端情况下,每架无人机只负责融合一个假目标点。如果想得到20个连续的假目标点,则需要60架无人机。因此,搜索算法中无人机的总数初始值设定为60架,采用禁忌搜索算法。在保证完成任务的前提下,减少无人机个数。直到减少无人机数目无法完成任务时,输出前一次搜索到的无人机的数目及其运动规律。
3 模型求解
3.1 模型分析
无人机若想干扰雷达形成假目标,必定在规定时刻运动到假目标和雷达的连接线上,如图3所示,为假目标跟5部雷达的连接线。只有无人机的运动轨迹与连接线产生交点,才有可能形成已知虚假目标轨迹点。

图3 轨迹点与雷达位置分布及连接线
根据题意,每架无人机在不同时刻可以干扰不同的雷达。由于无人机飞行速度以及雷达分布的限制,无人机在某一时刻与一个雷达产生给定假目标后,这架无人机不可能在其他时刻与其他雷达解算出其它已知假目标位置。但是无人机仍然会在不同时刻干扰不同雷达,只是解算出的假目标绝对不可能出现在给定目标中。具体原因如下,无人机的飞行高度限制在2 000 m到2 500 m,如图4所示的五个区域为雷达与假目标连线在高度2 500 m处的交点。经过计算,无人机在干扰其中的一部雷达形成已知假目标之后,以120 km/h-180 km/h的速度运动,在形成20个虚假目标轨迹点的190 s时间内,无法到达可以与另一部雷达的形成虚假目标轨迹点的区域。即一架无人机干扰雷达R1形成已知虚假轨迹点Bj后,由于距离太远以及无人机匀速直线运动的限制,该无人机无法飞到其他四个区域并干扰该区域的雷达从而形成已知的虚假目标轨迹点。

图4 连接线与2 500 m平面的交点
3.2 算法设计
对于第2节建立的优化模型,本文主要采用禁忌搜索算法(TS:Tabu Search)求解。在满足约束条件的前提下,搜索得到无人机个数、每个无人机的运动规律和协同策略下每个无人机负责融合的假目标点。
禁忌搜索算法是局部领域搜索算法的推广,是人工智能在组合优化算法中的一个成功应用。禁忌搜索算法的特点是采用了禁忌技术。所谓的禁忌就是禁止重复前面的工作。为了回避局部邻域搜索陷入局部最优的主要不足,禁忌搜索算法用一个禁忌表记录下已经到达过的局部最优点或者达到局部最优的一些过程。在下次搜索中,利用禁忌表中的信息不再搜索这些点,以此来跳出局部最优点[6]。
禁忌搜索算法中充分的体现了集中和扩散两个策略,它的集中策略体现在局部搜索,即从一点出发,在这些点的邻域内寻求更好的解,以达到局部最优解而结束。为了跳出局部最优解,扩散策略通过禁忌表的功能来实现。禁忌表中记录下已经到达点的某些信息,算法通过对禁忌表中的点的禁忌,而达到一些没有搜索的点,从而实现更大区域的搜索。它是局部搜索算法的扩展,它的一个重要思想是标记已得到的局部最优解或求解的过程。
禁忌搜索算法的特征由禁忌对象和长度、候选集、评价函数、停止规则和一些计算信息组成。禁忌表特别指禁忌对象及被禁的长度。禁忌搜索算法是一种人工智能算法,它的一个显著特点是使用了禁忌表。禁忌表中的两个主要指标是禁忌对象和禁忌长度。禁忌对象指的是禁忌表中被禁的那些变化元素。利用禁忌搜索算法求解无人机数目和运动规律的具体步骤如图5所示。
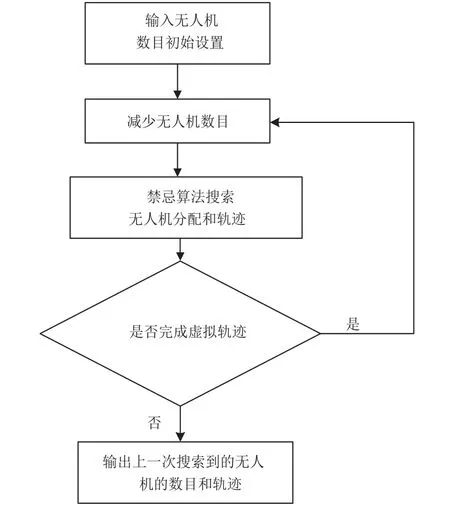
图5 算法流程
4 结果分析
4.1 仿真结果
通过模型求解和仿真验证,无人机在匀速直线运动的约束下,利用禁忌搜索算法求得最少利用33架无人机生成虚假目标轨迹,每架无人机的运动轨迹如图6所示。从图6中可以看出,无人机做直线运动,并且通过高度设定,保证无人机之间距离间隔大于100 m。
1号雷达的位置为(80000,0,0),2号雷达的位置为(30000,60000,0),3号雷达的位置为(55000,110000,0),4号雷达的位置为105000,110000,0),5号雷达的位置为(130000,60000,0)。每架无人机负责融合的假目标点如表2所示。通过表格可以看出每个点都能通过3部以上雷达的同源检测。例如t=0 s时,假目标点B1通过2号,3号和4号无人机的同源检验。

图6 无人机路径
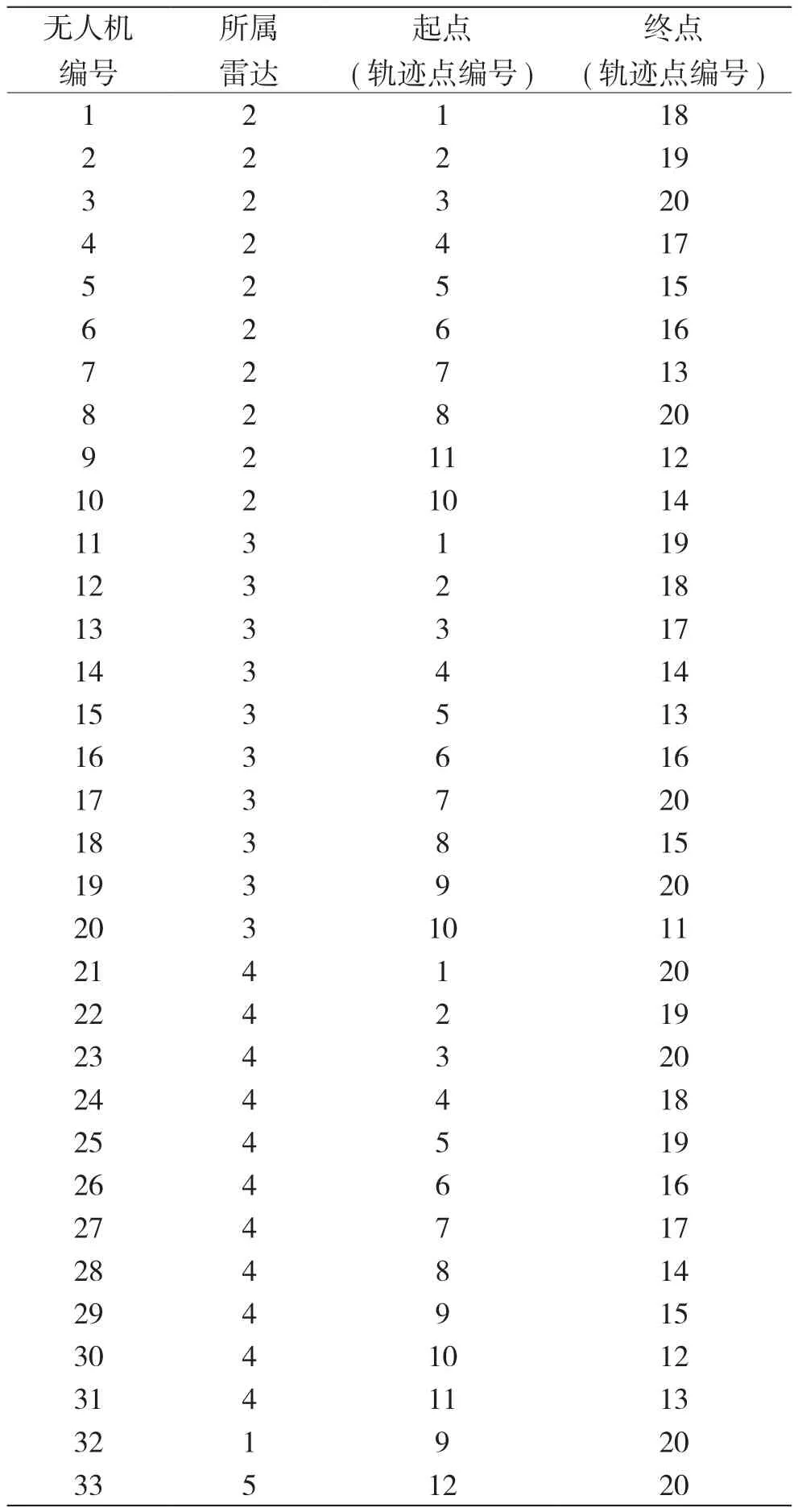
表2 无人机连接点表
4.2 误差分析
假设无人机Ui与雷达Rm形成虚拟目标轨迹点Bj,但由于无人机位置保存一位小数以及采用禁忌搜索算法存在一定的误差,导致在某一时刻无人机的到达位置B´与理想位置B出现偏差。如图7所示,A为雷达的位置,B,C为无人机理想位置和题目中给出的虚拟轨迹点j的位置,B´和C´为误差情况下无人机与假目标的位置。B与AB´在空间中的夹角为β,作BD⊥AC´和CD´⊥AC´。由于无人机在飞行过程中预定的干扰延时不变,可以得到 |B´D|=|C´D´|。

图7 误差分析
因此,由空间关系,我们可以求得误差距离为:
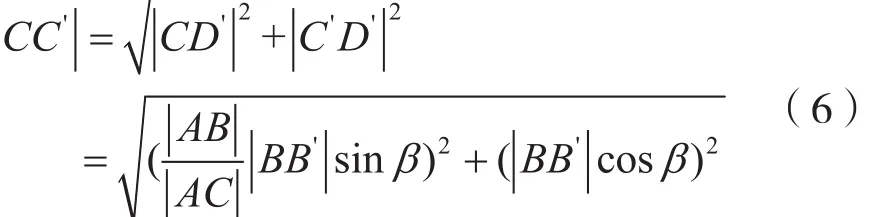
误差距离越小,融合出的假目标点与给定假目标点重合几率更大。给定误差距离一个阈值ε,只要误差距离小于等于ε,认为都是可以接受的无人机轨迹点。
5 结 语
多无人机协同生成虚假目标轨迹是对组网雷达产生干扰的一种有效方式。本文的研究目标是在生成给定虚假目标轨迹的前提下,最小化无人机数目。本文主要利用禁忌搜索的方法,根据无人机的限定条件,建立最小化无人机数目模型。通过对空间坐标点的遍历,规划出无人机合理的运动轨迹,并计算出无人机在运动过程中被雷达探测到的位置的坐标。仿真结果表明至少可以用33架无人机生成给定虚假目标轨迹。下一步我们将研究如何利用给定的无人机生成尽可能多的虚假目标轨迹。
猜你喜欢
中学生数理化(高中版.高考数学)(2022年4期)2022-05-25
现代电力(2022年2期)2022-05-23
环球人物(2022年4期)2022-02-22
小资CHIC!ELEGANCE(2021年32期)2021-09-18
军民两用技术与产品(2021年2期)2021-04-13
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
读友·少年文学(清雅版)(2020年4期)2020-08-24
读友·少年文学(清雅版)(2020年3期)2020-07-24
智能计算机与应用(2018年3期)2018-09-05
现代装饰(2018年5期)2018-05-26