
基于同步POS、航摄仪的无人机光束法平差方法的研究
2019-12-10 09:33姚睿赵峻天
科技创新导报 2019年21期
姚睿 赵峻天
摘 要:因GPS、IMU、航摄仪时间异步,导致POS辅助无人机航空摄影测量的实际精度比理论值低,现考虑到GPS、IMU、航摄仪三者时间异步问题,得到基于GPS、IMU、航摄仪时间同步的光束法平差数学模型,并对复杂地区的383张无人机序列影像采用7种不同的方案进行空三加密以验证其可靠性,结果表明:该光束法平差方法能显著的提高空三加密精度。
关键词:航空摄影测量 POS辅助光束法平差 时间同步 复杂地形
中图分类号:P207.2 文献标识码:A 文章编号:1674-098X(2019)07(c)-0064-02
轻小型无人机,一般只有导航POS系统,并无时间同步装置,即便有也未能消除不同步误差[1]。尽管机载GPS接收机具有比较准确的秒脉冲输出功能,而且POS系统能够根据GPS的每秒脉冲输出作为时间基准信号,按照设定的时间来修正整个导航系统的时间同步。但实际整秒脉冲发送出的GPS数据、IMU测得的数据与航摄相机曝光时间仍不能保持严格同步[2]。因此,会导致POS系统中GPS、IMU记录数据时间均与航摄仪曝光时间不同步。然而,在POS辅助空中三角测量中,需要知道同一时刻航摄仪曝光点的坐标及影像姿态,因此研究基于时间同步的POS辅助空中三角测量对于提高空三精度,对于进一步推广无人机测图技术在高精度测图中的应用有重大的现实意义。
1 基于时间同步的POS辅助光束法区域网平差模型
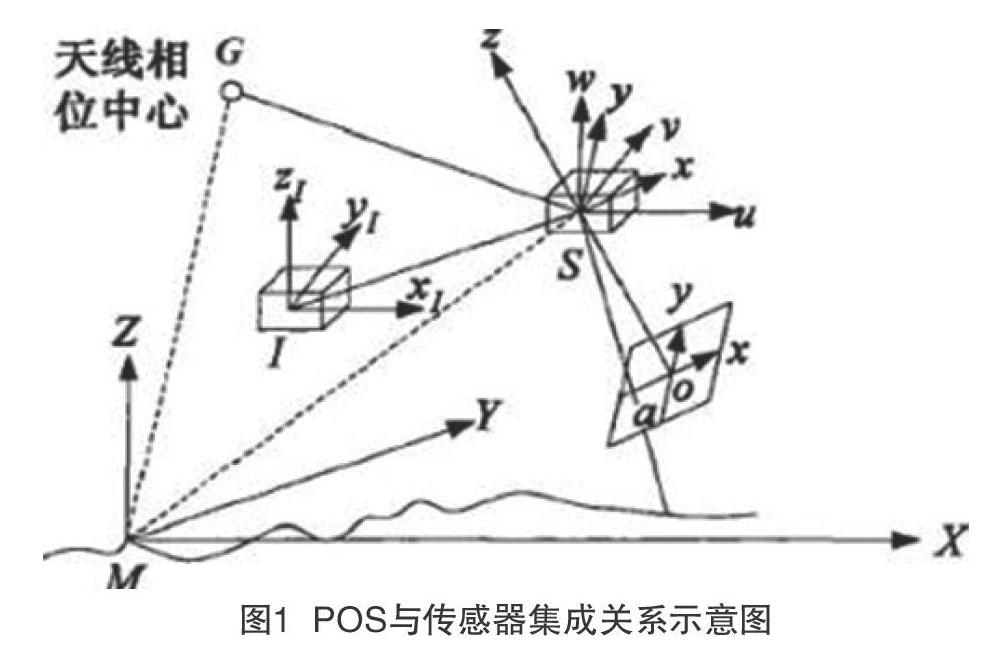
图1为POS与传感器集成关系示意图。GPS天线相位中心、IMU几何中心以及传感器投影中心存在矢量偏差;在航空摄影测量中,我们需要知道航摄仪曝光时刻投影中心瞬时坐标及影像的瞬时姿态,而GPS记录坐标的时间要早于曝光時刻的时间,IMU记录姿态的时间也早于曝光时刻的时间。在进行定位时,这些误差必须加以补偿[3]。
在地面坐标系P-XYZ中,设GPS天线相位中心坐标为(XG,YG,ZG);投影中心S坐标为(XS,YS,ZS);地面点A坐标为(XA,YA,ZA);GPS相位中心到IMU中心偏移矢量为(u1,v1,w1);GPS相位中心到投影中心S偏移矢量为(u,v, w);IMU与P-XYZ坐标系之间的旋转矩阵为RIM(?,θ,ψ),其中?,θ,ψ为IMU获取IMU的姿态参数;IMU与传感器坐标系之间旋转偏角构成的旋转矩阵为RSI(ex,ey,ez),其中ex,ey,ez为IMU坐标系与像空间辅助坐标系之间的偏差;像空间坐标系与P-XYZ坐标系之间的旋转矩阵为R(φ,ω,κ),其中φ,ω,κ为航摄像片的3个角元素。现以曝光时刻为时间基准,设GPS记录坐标的时间早曝光时刻t1s,IMU记录姿态的时间早曝光时刻t2s。由于GPS接收到飞控信号的时刻与航摄仪曝光时刻之间的时间差很小,故在这个很小的时间差中,飞机的运行可看作匀速直线运动。考虑到航摄仪曝光时间、GPS记录时间不同步问题,为了消除时间差引起的误差,可知曝光时刻GPS记录的坐标与GPS接收到飞控系统的信号开始记录的坐标之间存在如下关系:
2 实验方案设计及精度分析
现对甘肃省西和县洛峪镇、大桥乡进行无人机航拍,搭载相机为CanonEOS5DS,选取同一架次8条航带,共383张序列影像作为实验数据,试验区内地形起伏较大,其面积为28.087km2,实验区内最小高程为840.5m,最大高程为1570.2m,实验区共布设像控点12个。
2.1 实验方案设计
为了证明本文提到的基于POS、航摄仪时间同步的无人机光束法平差法的可行性,现采用7种方案进行比较分析,具体方案如下。
方案1:采用经典光束法区域网平差法,实验区四角各布设一个像控点,中心位置布设一个控制点,其余7个点作为检查点。方案2:采用传统POS辅助光束法平差法,实验区四角各布设一个像控点,其余8个点作为检查点。方案3:采用本文提出的基于POS、航摄仪时间同步的光束法平差法,像控点布设方案与方案2相同。方案4:采用传统POS辅助光束法平差法,像控点布设方案与方案1相同。方案5:采用本文提出的基于POS、航摄仪时间同步的无人机光束法平差法,像控点布设方案与方案4相同。方案6:采用经典光束法区域网平差法,实验区四角各布设一个像控点,内部均匀布设3个控制点,其余5个点作为检查点。方案7:采用传统POS辅助光束法平差法,像控点布设方案与方案6相同。
2.2 实验精度分析
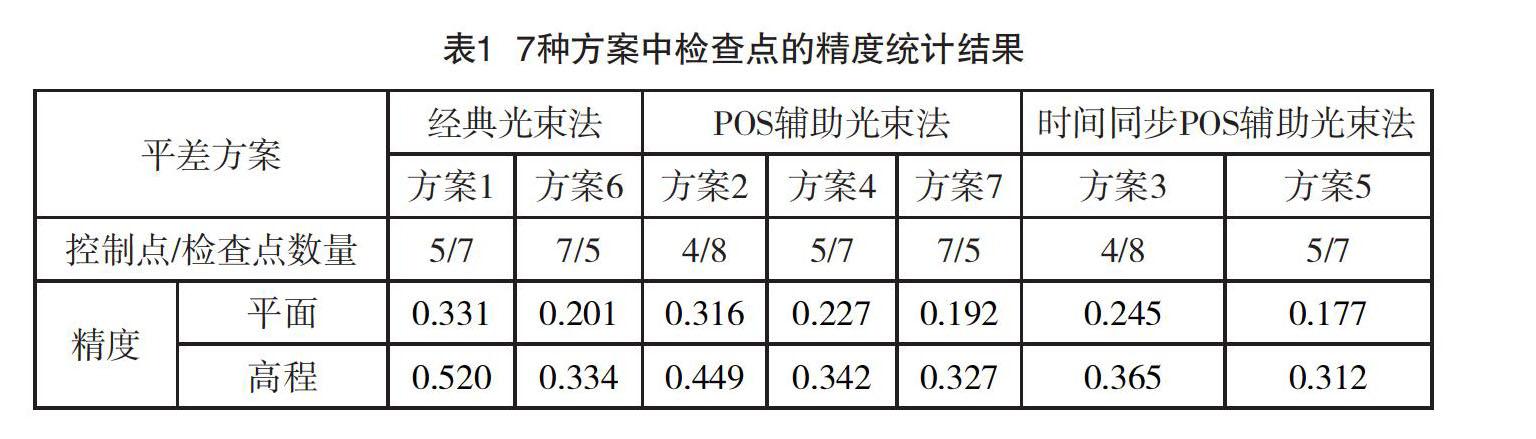
此次实验共采用经典光束法,传统POS辅助光束法,基于POS、航摄仪时间同步的无人机光束法区域网3种平差法以及7种像控点布设方案对实验区进行空中三角测量,各方案检查点的精度统计如表1所示。
从实验结果可知:在相同的像控点布设方案下,基于POS、航摄仪时间同步的无人机光束法平差法的精度高于传统POS辅助无人机光束法平差法的精度,传统POS辅助无人机光束法平差法的精度高于经典光速法平差法的精度;在本文提出的平差方法中,选用5个像控点的空三精度均高于经典光速法平差和传统POS辅助光束法平差中选用7个像控点的空三精度,且平面精度、高程精度均高于1cm;从方案3、5可知,在地形复杂的测区,选用本文提出的平差法,在测区四角布设像控点的同时,在测区中心附近再布设一个像控点,则空三精度有明显的提升。
3 结语
本文针对无人机摄影测量GPS、IMU、航摄仪三者时间异步问题,以航摄仪曝光时间为基准,推导出一种基于GPS、IMU、航摄仪时间同步的无人机光束法联合平差模型,其解算精度在传统POS辅助光束法区域网平差方法的基础上有了较大提高,这为因地形高差起伏过大且不便布设像控点的复杂地区的航空摄影测量提供了很大的帮助。
参考文献
[1] 石平,张文安.IMU/GPS 辅助航空摄影测量技术方法应用研究——以贵阳市航空摄影测量项目为例[J].测绘通报,2016(1):88-90,94.
[2] 刘帅,孙付平,陈坡,等.GPS/INS组合导航系统时间同步方法综述[J].全球定位系统,2012,37(1):53-57.
[3] 李学友.IMU/DGPS辅助航空摄影测量综述[J].测绘科学,2005,30(5):110-113.
