
基于虚拟现实技术的光学测风训练系统设计
2019-12-10 05:54昝兴海孙宝京
指挥控制与仿真 2019年6期
昝兴海,孙宝京,马 林
(陆军炮兵防空兵学院士官学校,辽宁 沈阳 110867)
1 系统需求分析
气象探测中光学测风[1]作业由于具有操作便捷,作业灵活,便携性强等优点,在各气象保障分队得到广泛应用。该作业通过操作光学测风经纬仪跟踪空中测风气球,实时测定气球的仰角和方位角,计算获取各高度的风向风速信息,形成气象保障产品。
光学测风采用人工跟踪方式实现测量,作业时采用“轨迹法”进行探测,即以气球的轨迹变化反映风的变化,其精度取决于操作人员对装备的熟练程度和作业环境。实装训练时,气球施放需要申请空域,训练频次受空域管制限制;气球充灌需要氢气保障和人员充放球协同配合,训练的时机和强度受作业环境和条件限制,影响训练效果;训练过程中无法实时获取跟踪和观测真值,导致训练效果难以定量评价,训练评定受评估方法限制。从而造成光学测风作业训练效率低、效果差、不能定量评定训练水平,且实装训练会带来大量的人力资源和物资器材损耗。虚拟现实技术的发展及其在军事训练中的广泛应用[2-8],为光学测风训练提供了新的思路[9]。
光学测风训练系统在无须施放气球的情况下,通过构建虚拟训练环境,取得与实装训练相同的训练场景、跟踪效果和训练反馈,实现光学测风作业模式的模拟训练,不仅能完成光学测风的基本操作训练和战术运用训练,而且解决了无球训练、定量评估等问题,能有效实现光学测风过程训、考、评的有机统一。
2 系统总体设计
2.1 系统功能
系统立足于光学测风保障模式的特点和流程,以实现气象分队训练过程可视化、训练场景定制化、训练评估定量化为目标,主要用于气象分队的测风准备、测风实施、数据处理等全过程测风训练,可实现以下功能:
1)训练环境构建。可根据训练需要,选择不同训练背景,自定义训练时间、训练地点、训练天气等,构建地面及空中训练环境,提高光学测风训练的针对性和适应性。其中,地面环境用于观测地域的选择、目标物角度测量等科目训练;空中环境用于测风跟踪实施训练,是环境构建的重点。
2)气球运动模拟。可根据历史观测资料或自定义轨迹模拟气球在训练场景中的轨迹变化及大小变化,实现光学测风的无球训练。
3)实时姿态反馈。通过在测风经纬仪实装上改装姿态传感器及封闭交互式视景装置,实时反馈装备的仰角、方位角及刻度盘等数据,对视景中的气球及环境进行更新,获得与实装训练一致的操作体验。
4)训练过程监控。可通过管理终端对训练场景进行定制管理,监控训练全程,实现训练效果的可视化。
5)训练效果评估。可对训练过程、训练结果进行定量评估。
2.2 系统结构
光学测风训练系统由管理终端和训练终端两部分组成,总体结构如图1所示。
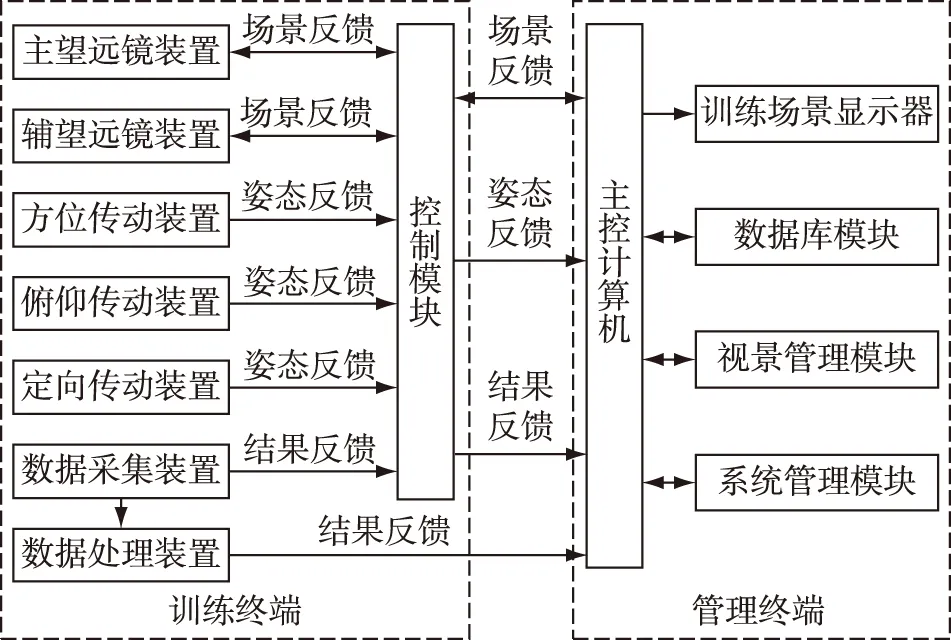
图1 光学测风训练系统总体结构图
训练终端由测风经纬仪模拟终端及数据处理终端组成,测风经纬仪模拟终端在测风经纬仪实装基础上加装姿态传感装置、虚拟现实设备、数据采集设备及控制模块等,数据处理终端采用实装配套的便携式处理平台、计算器平台或手工作业平台。训练时,根据管理终端设置,控制模块在训练终端测风经纬仪主望远镜或辅望远镜目镜端的虚拟现实显示器中生成训练场景,参训人员观测虚拟视景中气球的轨迹变化,并通过定向传动装置、方位传动装置、俯仰传动装置实时跟踪,数据采集装置实时获取测风经纬仪的仰角、方位角,一方面将姿态反馈至控制模块,通过管理终端对虚拟视景进行实时更新,对测风跟踪训练效果进行过程评估,另一方面将观测数据传输至数据处理终端,完成数据处理,并将处理结果以产品数据的形式反馈至管理终端进行结果评估。
管理终端为台式计算机或服务器,部署有数据库模块、视景管理模块、系统管理模块。其中,数据库模块用于历史观测资料、训练资料等数据的存储和管理,为虚拟仿真模型的构建及训练效果评估提供数据支撑;视景管理模块用于设置、渲染生成气球运动虚拟训练场景,并根据训练终端的场景反馈、姿态反馈情况实时更新;系统管理模块用于人员管理、视景模型管理、气球运动轨迹模型管理、训练评估管理等;训练场景显示器可全程显示测风训练跟踪情况。
2.3 训练流程
光学测风训练既可以通过一对一方式进行。也可以通过一对多方式进行,在一对一模式下,一个管理终端对应一部训练终端;一对多模式下,各子训练终端通过管理终端的设定科目,统一进行训练及考核,其训练流程如图2所示。
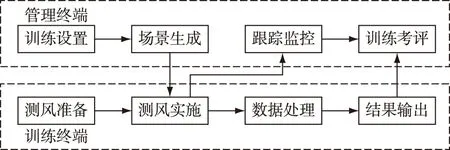
图2 光学测风训练系统训练流程示意图
管理员利用管理终端设置训练场景、气球轨迹等,生成虚拟训练场景。参训人员操作训练终端,完成测风经纬仪的架设、调平、装定等准备工作,通过测风经纬仪光学装置观察气球运动轨迹,判断测风经纬仪姿态与视景中气球坐标的偏差,调整实装仰角及方位角,并通过测角装置将仰角、方位角信息传输至管理终端,更新视景模型中气球运动,观测结束后,参训人员通过数据处理装置,获取各高度上的层风、真风、弹道风等数据。管理终端全程监控参训人员的测风跟踪情况,根据测风实施过程及测风结果对训练效果进行定量评估。
3 硬件设计
3.1 硬件结构
光学测风经纬仪主体由光学望远镜、定向装置、测角装置、水平装置、照明装置、数据采集系统、面板等部分组成。光学测风训练系统立足于实装,根据数据采集、数据反馈需求对测风经纬仪主体进行加装设计。具体包括:在主望远镜、辅望远镜目镜端,加装虚拟现实设备,用于虚拟训练场景的显示;在方位传动结构、俯仰传动结构、定向传动结构中,加装姿态传感装置,用于测风经纬仪仰角、方位角的实时测量和姿态反馈,更新训练视景;加装控制电路模块,改装控制面板电路,用于信号、接口的控制,以及各功能按键和选择开关的响应,以实现与视景的交互。光学测风经纬仪结构及加装示意图如图3所示。
3.2 信号反馈流程
根据功能响应的不同,控制系统中的信号分为DI信号、AD信号、视景信号及控制信号。仿真控制单元及信号反馈流程如图4所示。

图4 仿真控制单元及信号反馈流程图
1)DI信号,为数字量输入接口,主要用于各功能按键的电路响应,在实装电路板的基础上引出按键信号,设计电路板,加装在测风经纬仪腔内。
2)AD信号,为模拟量输入接口,用于选择开关以及方位、俯仰、定向调整转螺的控制响应。其中选择开关包括倍率选择开关、进光状态开关,倍率选择开关用于模拟测风经纬仪主望远镜和辅助望远镜的选择切换,控制虚拟视景中气球模型以及环境模型的缩放比例;进光状态开关用于模拟测风经纬仪进光反射镜的开关,控制虚拟视景的亮度。在方位、俯仰、定向调整转螺的传动下,角度传感器和编码器产生脉冲信号,由控制系统驱动视景更新。
3)视景信号,通过VGA接口与控制系统、显示器、管理终端进行交互,生成训练视景,分别传输至管理终端训练场景显示器以监控训练过程,以及测风经纬仪目镜端虚拟现实设备显示器以更新训练视景。
4)控制信号,用于控制视景的更新以及通信传输等,通过USB接口与管理终端进行交互。
4 软件设计
4.1 软件组成
光学测风训练系统软件由虚拟场景生成模块、姿态反馈模块、数据处理模块、训练效果评定模块、数据库管理模块等组成。
1)虚拟场景生成模块。通过设置训练时间、天空云量、气候、气球初始大小、气球运动轨迹或气球升速等,渲染生成虚拟场景,分别在训练终端视景显示器和管理终端训练场景显示器同步显示。
2)姿态反馈模块。根据光学测风经纬仪的仰角、方位角姿态传感器获取的实时数据,对训练终端的视景及管理终端的训练场景同步动态更新。
3)数据处理模块。观测结束后,通过光学测风数据处理系统获取测风结果数据。
4)训练效果评定模块。根据测风实施过程中各观测时刻操作员跟踪气球误差,获取训练过程评定数据,根据测风数据处理结果,与真值比对获取结果评定数据,实现训练效果的定量评估。
5)数据库管理模块。对光学测风训练的视景数据、历史观测资料数据、训练信息数据进行管理。
4.2 气球运动轨迹模型
气球是光学测风作业的跟踪目标,如何逼真地模拟气球相对于训练环境的运动轨迹是虚拟仿真环境构建的关键。
为使光学测风训练能够真实地反映实际气象条件,系统中基于高空探测装备及光学测风经纬仪历史实装探测数据,反演气球随时间的轨迹变化。
各历史探测数据以(Ei,Ai,ti,Hi)格式存储在数据库中,其中ti为某次实装探测中第i组观测数据的获取时刻,Ei为ti时刻高空探测装备天线仰角或测风经纬仪观测仰角,Ai为ti时刻高空探测装备天线方位角或测风经纬仪观测方位角,Hi为ti时刻气球高度,由此,可计算出该时刻气球的空间位置坐标(xi,yi,Hi,ti)
其中,Li为ti时刻气球与观测点的空间距离,xi为ti时刻气球在地面投影东分量,yi为ti时刻气球在地面投影北分量。
视景中气球的轨迹变化应为连续的,为防止观测训练过程中出现视觉上的气球轨迹跳变,对于两观测时刻(ti,ti+1)区间内的气球轨迹变化,可通过内插方法分别构建该区间上的东分量、北分量和高度坐标变化曲线。
4.3 视景模型
系统中的视景采用虚拟现实渲染生成,由Unity3D游戏引擎驱动,主要由环境模型、气球模型、刻度模型构成。
光学测风作业模式采用人工跟踪方式,其观测能力与训练环境,尤其是空中环境息息相关。为使虚拟训练环境与实际环境尽可能保持一致,环境构建时,系统中融入天空背景模型[10-11],区分白昼及晴天、少云、多云、阴天。在白天,重点考虑日光、环境光对气球模型的光线影响,以及云层对气球的遮挡效果;在夜间,实装观测时,气球下方通常悬挂测风灯笼或Led灯光等,以便于光学观测,因此在虚拟环境构建中不仅要考虑月光对气球模型的光线影响以及云层遮挡,同时应关注夜间星空对气球的观测干扰。环境模型由管理终端设置生成,并根据训练终端测风经纬仪仰角、方位角的姿态变化实时更新。
随着气球与观测点空间距离的变化,气球相对于人眼的视角也在不断变化,视觉大小也在不断变化,反映到虚拟训练视景中即为气球大小随空间距离的变化,系统中根据气球与观测点的实时空间距离Li以及测风经纬仪主、辅望远镜的放大倍率对视景中气球大小进行比例缩放。
刻度是测风经纬仪观测视野的重要组成部分,分为上下两组刻度,上刻度为仰角,下刻度为方位角,在方位调整转螺、俯仰调整转螺、定向调整转螺的传动下,刻度发生相应的变化。系统中,视景中的刻度采用虚拟现实技术构建,在方位、俯仰、定向角度传感器及编码器的作用下,进行实时更新。根据实装特性,方位、俯仰调整转螺更新整个虚拟视景,包括环境、气球以及刻度,而定向转螺只对刻度进行更新,且更新响应速度与实装转螺响应几乎一致。
系统中构建的虚拟视景在训练终端显示器和管理终端显示器中显示如图5,图6所示。

图5 训练终端显示器观测视景

图6 管理终端显示器显示视景
4.4 数据库模型
光学测风训练系统数据库配置于管理终端,在逻辑上分为系统基础库、视景数据库、历史资料库、训练信息库四个部分。
1)系统基础库。主要存放用户信息、码表信息和系统配置信息,是系统运行的基础数据库。
2)视景数据库。主要存放环境数据,如天空背景数据、云状云量数据、日光数据、月光数据、星光数据等;气球数据,如气球颜色、气球大小等,是虚拟训练环境构建及气球模型构建的数据基础。
3)历史资料库。主要存放高空气象探测装备历史探测资料,如装备信息、探测时间、探测地点、各时刻天线仰角方位角数据、各高度上的风向风速数据、探测产品数据等;光学测风经纬仪历史观测资料,如观测时间、观测地点、规定时刻仰角方位角、产品数据等,是虚拟训练环境中气球运行轨迹及气球大小变化的数据基础。
4)训练信息库。主要存放光学测风训练场景设置数据、过程数据、结果数据,是训练效果评估的数据基础。
5 结束语
本文针对当前气象分队光学测风训练效率低、环境单一、效果无法定量评估等问题,采用虚拟现实技术,构建多样化的训练环境,满足复杂环境下的训练需要,克服空域限制导致的训练频次、训练强度受限等问题,可实现无球训练,节约训练经费。通过对光学测风作业模式的全过程仿真训练,实现训、考、评有机统一,采用在实装操作终端中嵌入硬件式结构、分布开放式训练习题库设计,满足较好的可加装性和拓展性需求,具有良好的军事经济效益。
猜你喜欢
初中生学习指导·中考版(2022年4期)2022-05-12
国际太空(2021年11期)2022-01-19
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
学苑创造·A版(2017年10期)2017-12-21
中国化妆品(2017年12期)2017-06-27
中学生数理化·中考版(2016年2期)2016-09-10
太空探索(2016年7期)2016-07-10
小火炬·智漫悦读(2015年1期)2015-06-08
数理化学习·高三版(2009年2期)2009-04-03
幼儿智力世界(2004年5期)2004-05-27
