基于STM32单片机的智能救援机器人
2019-12-09 02:06郑金志张万礼高亚兰
智富时代 2019年10期
郑金志 张万礼 高亚兰

【摘 要】本文是在基于STM32 F103RBT6单片机基础上设计的多功能智能履带小型救援机器人,该救援机器人旨能在一些危险环境下,完成救援任务。实现越障,探测,避障,呼救等救援功能。其内置多种传感器和控制系统,能够精准控制救援。以下是该智能救援机器人的硬件部分的构成和软件部系统的构成。
【关键词】救援机器人;单片机;智能控制
1.引言
每年都有上万人死于地震、矿难、滑坡、山体泥石流等自然灾害,灾难有时是无法避免的,但有效的救援能大大降低灾难带来的损失,以及人员伤亡。为此我们将研究一款新型智能救援机器人,是一种基于STM32单片机的小型救援机器人,该机器人将完成类似于现实的一些救援动作,如巡线行驶,避开障碍,清除障碍等救援动作。该小型智能救援机器人顺利完成后希望能给以后的救援机器带来参考价值。
2.智能救援机器人的硬件设计
该小型智能救援机器人总共包含以下五个模块
(1)驱动电源加车身模块(电源至于车身内部,分为车身电源和机械臂电源);
(2)感应器检测模块(实现越障,探测,避障,呼救等救援功能);
(3)中央控制器模块(该救援机器采用了主控制器STM32F103RBT6)
(4)电机驱动模块(分为履带和机械臂驱动电路,芯片则为L298N)
(5)声音报警模块(蜂鸣器)
3.电源电路及车身设计
3.1供电模块
该救援机器人有三个模块需要供电。因为STM32单片机的额定电压为3.3V,而由充电电池的通性知如果采用恒压3.3v充电电池,使用一段时间后会导致电压偏低,从而会导致芯片无法正常工作。因此该救援机器人的电池为7.4V充电电池,同时需要低压差稳压芯片TPS7350,以达到3.3V恒压的目的; 整个供电系统是通过一节7.4V充电电池供电,需要提供3.3V恒压给STM32,5V恒压供给电路板,机械臂电机用电池直接供电,所以采用更加稳定的的TPS7350和TPS7333的芯片分别达到5V和3.3V的供电需求。因为救援机器人的车身履带电机则采用飞思卡尔B车电机,该电机驱动力大需要12V供电电压,只需将7.4v充电电池通过加压芯片B0512提升到12V即可完成供电。
3.2车身设计
救援机器人的车体部分使用了复合履带驱动方式,履带驱动力采用12V飞思卡尔B车电机为其提供强有力的驱动力,在实际救援环境中,履带式移动底盘需要在复杂的地形中工作,并要求越障以及爬楼,因此履带底盘结构设计了履带前脚,能大大的增加履带机器人的灵活越障性。
4.感应检测模块
救援机器人的避障模块使用HC-SR04超声波模块。HC-SRO4可提供2ca-400cm非接触式。该模块利用了超声波能量消耗慢、传播距离远、传播稳定等特点。该超声波模块同时还可完成距离的测量功能。该模块通过超声波发出和接收的时间间隔来计算距离,超声波测距模块能够精准、快捷地测量出障碍物到超声波发射器之间的距离。其测量精准度可达0.3厘米;控制电路可通过计算距离来控制小车行驶方向,从而及时避开障碍物。
5.控制驱动电路
5.1主控制芯片
该救援机器人采用STM32 F103RBT6单片机作为其核心芯片,STM32系列是一款专为中低端打造的32位ARM微控制器,其性能优越,功耗低,价格实惠,同时最高频率可达72MHz。具有单周期乘法、硬件除法等特点。其存储器从16K到512K字节的闪存程序存储器。STM32运算之快,串口灵活足以处理救援机器人的全部功能。 支持6路舵机PWM脉冲信号输出,可以同时支配6个舵机进行角度和转速的自由变换。输出信号由串口命令控制,操作简便,命令响应速度快。可同时输出6路精准的舵机转向角和控制舵机转动时间的信号,可实现多路并行控制,各路独自运行。该控制器的实现奠定了救援机器人的操控系统。
5.2电机驱动电路
使用L298N芯片可驱动救援机器人的低盘履带直流马达和机械臂步进马达,L298N可支持PWM调速控制。通过单片機调控芯片,实现对电机的转速和方向的控制,从而让履带带动车身完成前进、后退和转弯等动作,是一种比较理想的芯片。机械臂的电机也是如此,但机械臂的运作需要传感器的协调运作。通过对单片机的编程,使机械臂实现自动伸缩,抓取等系列救援动作。
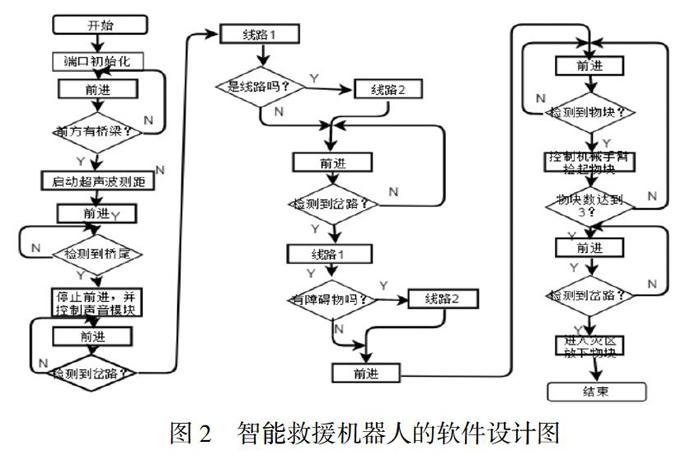
6.智能救援机器人的软件设计
由于采用了STM32单片机,该单片机最大的优点就是告别了汇编语言,从而使得代码效率高,执行速度更快,更易上手,所以我们用C语言编写了该救援机器的软件系统,C语言能更好的实现救援机器人的各种复杂的操作,从而达到精准控制的目的。如机械臂的放取动作和履带车的避障功能等。
7.总结
本文是关于小型救援机器人研究和实现。它可以在模拟的危险环境下完成拟救援任务即避障,自动寻找路线;顺利翻越壕沟,并能准确测出障碍物距离;通过多种传感器识别路况,及时分析并做出预警判断,精准操控车身行驶方向躲避危险;在行驶中能自动识别、捡起、放下物块;行驶到规定的地点自动停止并提醒救援结束。相信该小型救援机器人会给以后的救援机器带来参考价值。
作者简介:郑金志(1998-),男,安徽人,本科在校生。
基金项目:2018年安徽省大学生创新创业项目:基于STM32单片机的智能救援机器人(编号201810379113);
猜你喜欢
电子制作(2019年13期)2020-01-14
电子制作(2019年15期)2019-08-27
电子制作(2019年9期)2019-05-30
电子制作(2018年12期)2018-08-01
电子制作(2017年19期)2017-02-02
计算机教育(2016年10期)2016-12-19
求知导刊(2016年30期)2016-12-03
科学与财富(2016年28期)2016-10-14
电子设计工程(2015年15期)2015-02-27