建筑塔吊防碰撞监控系统的设计
2019-12-06 06:22胡玉凤李元庆
商情 2019年48期
胡玉凤 李元庆

【摘要】本文介绍了建筑塔吊防碰撞监控系统的设计研发过程。通过设计塔吊运行中的塔臂旋转角度、塔机旋转速度、风速、位置等运行参数,设计实时监测电路、塔吊间无线通信电路、塔吊与管理方终端GPRS物联网无线通信电路、触摸屏显示模块和报警及警示模块电路;提出了有效可行的塔吊防碰撞系统算法,并予以硬件实施,制作出双塔吊防碰撞系统模型样机,并予以系统功能测试。
【关键词】塔吊 防碰撞 安全检测 无线通信
一、引言
近年来,因楼群密集度的加大,为加快建造进度,人们需将多台塔吊集中分布在同一施工场地,并在固定区域内同时交叉工作,这容易导致塔吊间发生碰撞事故。近十多年来,为满足多塔吊协同工作的安全条件及需求,塔吊间的防碰撞问题已经引起了学术界和工业界的高度重视。目前人们利用先进的传感器技术、微处理器技术、无线通信技术,提出了一种基于ARM的建筑塔吊防碰撞监控系统,该系统具有功能完善、工作性能可靠及塔吊防碰撞安全监控系统,能实现塔吊运行状态和多种工况信息的实时检测,对潜在的碰撞予以及时预警,增强了多塔吊同时作业的安全性,并提高了多塔吊设备管理的远程监控能力,他的研发具有重要的理论技术及工程操作意义,具有广泛的应用前景。
二、塔吊防碰撞监控系统工作原理
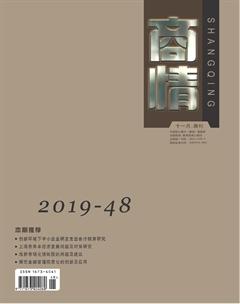
图一为塔吊防碰撞监控系统设计原理图,通过对单塔吊自身信息的收集及塔吊间的信息自主交互,实现所设计制定的塔吊间防碰撞算法,最终实现塔吊间的防碰撞、监控及符合安全规范的双塔吊防碰撞监控系统。
建筑塔吊防碰撞监控系统主要工作原理过程为,当塔吊启动运行后,微处理器根据电机驱动方式控制模块发出的控制命令,控制电机实现不同的起重臂转动状态;同时,采集单塔吊的定位信息、风速信息、起重臂转动角度、电机状态等信息,并将塔吊的起重臂转角、风速、电机状态、塔吊状态等信息在显示器上予以显示;系统通过塔吊与管理方无线通信模块将塔吊位置、风速、起重臂转动角度等信息数据传送到管理方客户端,最终实现管理终端对塔吊的运行状态及所处环境状态的实时监控。对于塔吊系统,实时塔吊起重臂转角信息通过塔吊间无线通信模块,实时进行信息的自主交互。若双塔吊系统不存在碰撞危险,则正常运行;若存在碰撞危险,则系统会发出报警提示、对塔吊实施紧急刹车,并在显示器显示危险警示信号,提示操作人员注意安全操作。在塔吊发生事故时,塔吊操作人员可选择一键求救,求救信息包含与事故塔吊相对应的塔吊位置和名称,塔吊管理方便根据求救信息快速定位出发生事故的塔吊,并及时做出相应措施。当风速超过规定范围,塔吊也会紧急刹车,并发出声光报警信号。
三、塔吊防碰撞监控系统所用软件及算法设计
算法设计的目的是为了在塔吊可能发生碰撞危险时,能及时阻止碰撞趋势及事故的发生,特别是在塔吊操作人员未能及时阻止碰撞趋势或紧张等原因而做出错误操作的情况下,此算法仍可以起到塔吊紧急防碰撞功能。下面以双塔吊为例,分析塔吊间发生碰撞的可能性。
①两塔吊有重叠或交叉的工作区域,且其处于相同或近似高度,吊臂在转动过程中存在发生碰撞的可能性分析。
②塔式起重机有重叠或交叉的工作区域,且其处于不同高度,高位塔式起重机及所吊的重物或吊绳与低位塔式起重机吊臂存在发生碰撞的可能性分析。
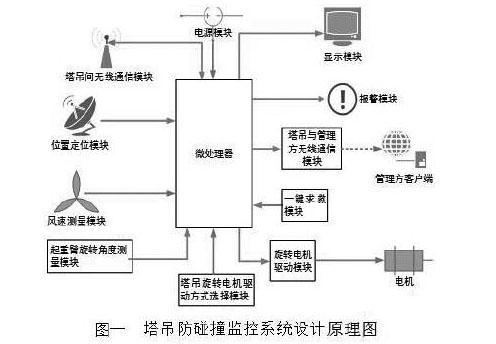
(1)当双塔吊处于相同或者近似高度的情形分析。图二是近似高度的双塔吊系统示意图(其中|H1-H2|<Δ,Δ为一个安全余量)。
由图三可见,图中的灰色阴影部分即为塔吊发生相互碰撞的重叠区域;其中TA、TB分别表示塔吊A和塔吊B的基座中心;P1、P2分别为双塔吊重叠工作区域的临界点;C點表示重叠区域的中心位置,它是线段P1P2和线段TATB的交点之一;RA、RB分别为塔吊A和塔吊B的吊臂长度。结合图三,根据三角形角度函数关系有
因此,当确定两塔吊间的相邻距离TATB以及两塔吊的吊臂长度RA和RB后,便可根据上述公式计算出双塔吊发生碰撞可能存在的危险区域(如图三中灰色部分)。该危险区域在塔吊架设时便可计算获得。当任一塔吊吊臂一旦进入该区域,则启动防碰撞算法计算。
(2)图四是塔吊处于不同高度及差异较大的情况下,相邻两塔吊的布置示意图。图四中,H定义为安全裕度,表示高位塔吊吊缆与低位塔吊起重臂间的一个最低水平安全距离,当高位塔吊吊缆与低位塔吊起重臂间的实际距离大于裕度H时,塔吊间不存在相互碰撞可能,因此不需启动塔吊间的防碰撞算法;反之,当实际距离小于裕度H时,则需启动塔吊间的防碰撞算法。所启用的防碰撞算法,其关键仍为利用上述公式计算出塔吊工作的重叠区域,并判断吊臂是否进入该区域运动。
从上述分析可知,当两台塔吊吊臂同时进入存在碰撞可能危险区域(单塔吊吊臂进入危险区不会出现碰撞危险)时,可进一步根据两塔吊起重臂之间的转角裕度进行判断是否存在碰撞可能:若两机保持安全角度(即安全距离),则系统正常工作;若出现多塔吊起重臂运行危险接近,则两者转角裕度低于安全裕度,系统会发出报警信号提醒操作员注意安全操作,若低于转角裕度的临界值,塔吊操作人员没有做出阻止碰撞的操作或者做了错误操作,则启动防碰撞指令,塔吊紧急刹车,此时塔吊系统只能执行向非碰撞区域转动的操作。
四、建筑塔吊防碰撞监控系统的主程序设计
为实现监控系统对塔吊起重臂旋转角度测量、电机驱动及控制、风速测量、定位、塔吊间及塔吊与管理方通信,显示功能和报警及警示,需对监控系统予以系统软件设计和程序编程。系统主程序运作过程如图五所示。
五、结论
随着科技的迅速发展,为提高建筑施工效率、节约成本,对建筑工地智能塔吊组群协同工作提出了新的要求。如何将先进的微处理技术、传感器技术、网络通信技术等融入到建筑领域,解决塔吊自身各部分的安全监控及塔吊间的防碰撞问题,是本课题研究设计的目的。为此,设计了建筑塔吊防碰撞监控系统,并研究设计了可行、有效的双塔吊系统防碰撞算法。所设计系统硬件模型的功能测试结果不仅表明预期功能的可行性和有效性,且反映了系统整体工作的可靠性。本设计为其他相似的塔吊间防碰撞设计及研究提供了参考。
猜你喜欢
风流一代·青春(2022年4期)2022-04-20
当代工人(2019年19期)2019-11-22
做人与处世(2018年6期)2018-05-21
农村百事通(2017年2期)2017-02-17
山东工业技术(2016年23期)2016-12-23
电脑知识与技术(2016年26期)2016-11-25