基于ARM的智能搬运机器人设计
2019-12-05 02:48何丙禄
无线互联科技 2019年16期
何丙禄
摘 要:文章设计的是一款以STM32微控制器为控制核心的可实现寻迹驾驶、避障和抓取物体功能的智能搬运机器人,微控制器可以处理外围的寻迹模块和避障模块采集到的信号,保证机器人稳定的运行和能做出避障动作,并配有4个舵机构成的四自由度机械臂,整个系统由锂电池供电,保证整个系统供能稳定运行。
关键词:微控制器;机器臂;寻迹;避障
智能小车发展十分迅速,主流的是自动导引运输车(Automated Guided Vehicle,AGV),但是AGV仅有搬运功能,本作品主要是通过识别地面上的黑线来判断小车需要行驶的方向,通过超声波模块来判断是否有障碍物,并以此做出相应的避障动作,是结合机械臂和搬运车于一体的机器人,配置的机械臂可以实现对物体的搬运,加强工作性能[1-3]。
1 硬件系统设计
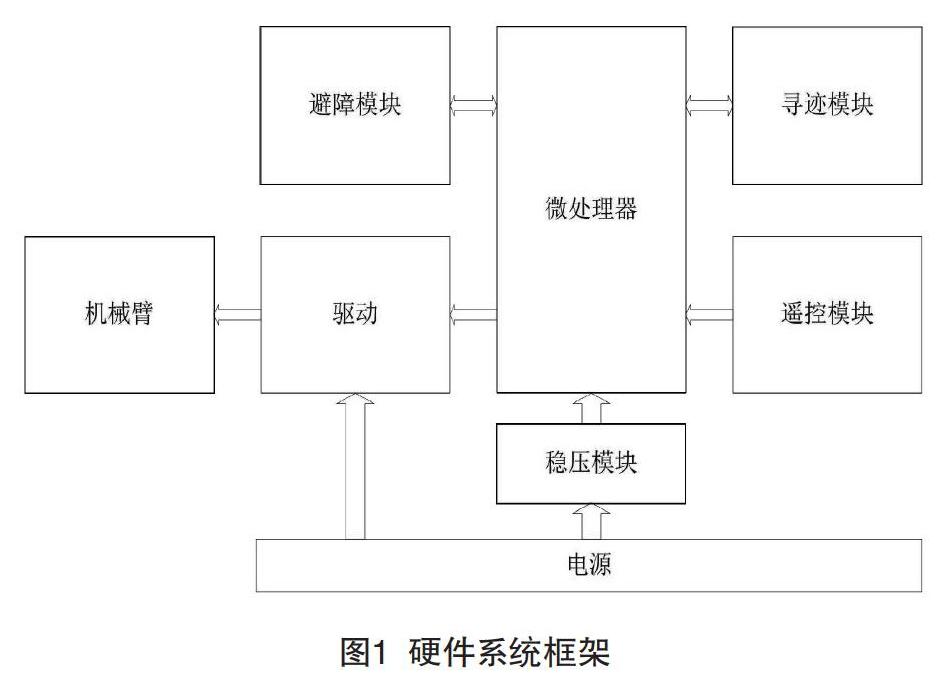
图1是整个硬件系统的设计框架,采用STM32微控制器作为设计的控制核心。整个设计主要分为运送和抓取两部分:(1)运送部分,由小车构成,车上搭载了电机驱动、循迹模块和避障模块,通过循迹模块,可以识别地面的黑线,保证小车的正常运行。同时,为保障运行顺畅,加入了避障模块,将循迹和避障模块采集到的数据,通过输入/输出(Input/Output,I/O)口发送给微控制器分析后控制驱动,保证小车的稳定运行。(2)抓取部分,由一个有4个舵机的机械臂完成,通过远程手柄控制实现机械臂抓取物体。整个系统由锂电池供电,但是由于微控制器所能接收到的电压很小,所以加入稳压模块。
1.1 微控制器
STM32微控制器是一款32位微控制器,性价比高。STM32内部具备调压器、精确的RC震荡电路、时钟控制电路、低压检测等丰富的功能,时钟频率可倍频值为72~180 MHz。采用ARM架构,精简指令集,丰富外设资源,本设计主要使用了处理器的0-13号管脚,来控制整个系统的运行,并使用了片内的模/数转换器(Analog-to-Digital Converter,ADC)模块、定时器串口等功能。
1.2 电机驱动及电压转换模块
本系统驱动IC采用的是L298N芯片,这是驱动IC专门应用于小功率性的电机驱动。其驱动电流最大能达到2 A,平局电流能达1.5 A,使用于多数消费型电子产品。内部集成一个独立的H桥,通过控制对应的I/O,可以控制电机的正转、反转等。
本系统需要使用多种电源供电,所以将输入的电压转变成6 V和5 V的供电电源,对应的供给电机和微控制器使用。电源变化有多种技术,直流变换常用的就是BUCK降压电源和现行电源。但现行电源的供电功耗大、易发烫,所以采用6 V电源直接供给驱动电机,而在微控制器的工作电流下,输出电压稳定。
1.3 寻迹模块
机器人正常运行方式是两个寻迹模块都没有接触到黑线,但始终保持检测。在整个过程中,如果1号和2号传感器检测到黑线,那么这两个传感器就会电平调变,此时微控制器做出反应,控制驱动使小车向左侧行驶;同理,如果右侧的3号、4号传感器检测到有黑线,那么就向右侧行驶;这样就能不断调整方向,使小车保持直线状态。转向是通过4个轮子的差速完成的,对于不同的弯道调整转速和方向。电路包括传感器和调理电路两个部分,传感器部分有红外发射管,主动发出红外线,若有信号返回,接收管接收,证明地面有黑线;调理部分采用的是lm393型电压比较器,内部有两路电压比较器,可同时比较两路电压。
1.4 避障模块
超声模块有测距功能,利用该功能进行避障。模塊发出超声波,遇到遮挡物返回声波,对于返回的超声波做出判断,检测并计算与前方的距离,程序预设一个临界范围,若在规定阈值内没有检测出障碍物,则机器人可以运行。该设计采用的是hc-sr04型超声波,模块上有VCC,GND、发射信号和接收信号4个引脚,供电电压为5 V,信号管脚连接到微控制器的I/O口上。
1.5 机械臂及遥控模块
机械臂是由4个舵机组成的四自由度机械手爪,每一个关节处都是由舵机支架连接在一起的,通过驱动给舵机供电,保证其运行。通过微控制器编写的程序实现远程的遥控控制,这样保证其工作的准确度和稳定性。
按键模块主要包括以下几个部分:(1)整个系统的供电开关,采用自锁式开关。(2)复位按键,在系统出现问题时,保证系统不被损害,设置复位按键。由于考虑按键的误动作,常用软件程序削抖,采用延时检测的方法,延时5~10 ms再次判断按键的按下情况,避免误动作的发生。(3)遥控部分,使用PS2摇杆模块,有发射端和接收端,分别在远程操作者和机器人端实现远程对接,完成遥控执行任务。
2 工作流程
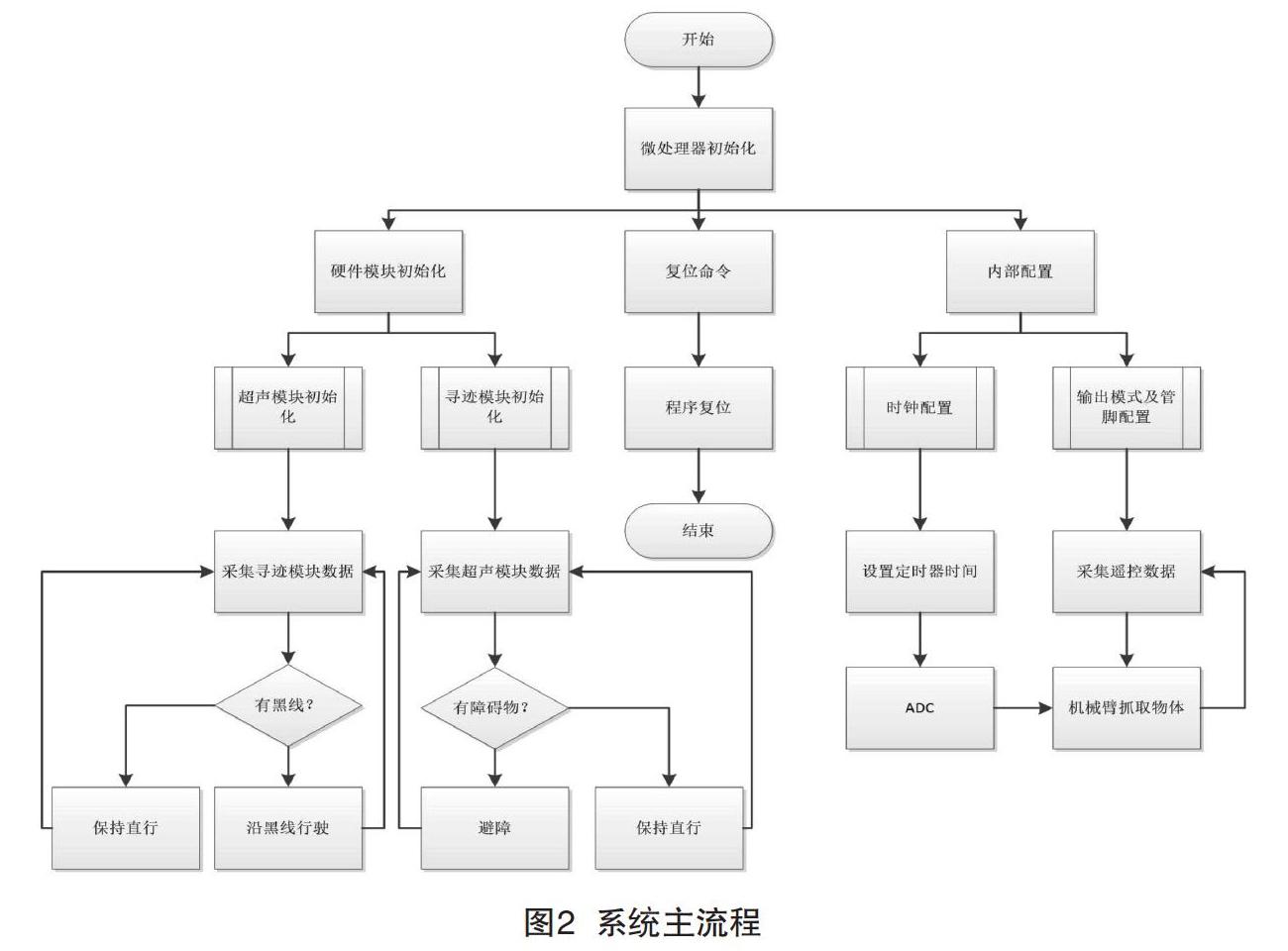
程序开始对处理器进行初始化,初始化分为硬件模块初始化和微控制器两部分。内部为硬件模块初始化,包括超声波模块初始化和循迹模块初始化。内部配置包括微控制器的时钟配置,输出模式及管脚配置。之后进行寻迹模块和超声模块数据采集,对采集到的数据进行判断。判断传感器是否有识别到黑线,如果有则沿线行驶,如果未找到,则保持直行。判断采集到的超声数据是否有障碍物,如果有,则避开障碍物,如果未扫描到障碍物,则保持直行状态。系统主流程如图2所示。
3 结语
经过不断的实验,使智能搬运机器人工作正常,可以实现智能的寻迹驾驶和避障行为,同时,远程可以操控舵机机械臂搬运物体。整个作品的完成过程,积累了很多的知识与经验,将理论的知识和实际中的硬件设备结合在一起,更加理解智能产品的工作原理,受益匪浅。
[参考文献]
[1]邓哲宇.轮式移动机器人建模与运动控制策略研究[D].杭州:浙江大学,2015.
[2]王大宇.轮式移动机器人控制系统的设计与实现[D].大连:大连理工大学,2013.
[3]王珊珊.轮式移动机器人控制系统设计[D].南京:南京理工大学,2013.
猜你喜欢
电子制作(2017年14期)2017-12-18
科技创新与应用(2016年34期)2016-12-23
九江学院学报(自然科学版)(2015年1期)2015-11-12
电子设计工程(2015年15期)2015-02-27
单片机与嵌入式系统应用(2014年8期)2014-03-23
单片机与嵌入式系统应用(2014年9期)2014-03-11
电子设计工程(2014年18期)2014-02-27