基于LabVIEW的一级倒立摆LQR控制仿真设计
2019-12-05 02:48刘群铭兰育飞史颖刚
无线互联科技 2019年16期
关键词:人机交互
刘群铭 兰育飞 史颖刚

摘 要:文章针对控制系统教学中常用的一级倒立摆系统,进行了建模与分析,并设计了一级倒立摆系统LQR控制器。使用LabVIEW作为开发平台,对系统和控制器进行了实时仿真,并开发了一款实验教学仿真软件,可进行控制系统建模、性能分析、LQR设计等方面的研究。该软件界面简单,便于人机交互与实时操作,对控制系统教学的改革创新有一定指导意义。
关键词:一级倒立摆;实时仿真;LabVIEW;人机交互
倒立摆系统是控制、数学、力学、电学等理论的有机结合和综合应用,是验证各种控制方法和理论的实验平台。因此,研究倒立摆系统可以提高学生应用控制理论或方法的能力,拓宽控制理论或方法的范围。控制系统的仿真可以将抽象的、静态的理论知识转化为具体的、动态的演示模型,对理论、实验教学有一定促进作用。虚拟实验[1]可以提供给学生更多时间和机会接触和研究实验,利于学生综合掌握控制理论。为此,本文对一级倒立摆系统进行了建模与分析,并使用LabVIEW进行了仿真设计。
1 一级倒立摆系统建模与分析
倒立摆控制系统是一个复杂的、不稳定的非线性系统,是进行控制理论教学及开展各种控制实验的理想实验平台,是一种研究控制理論的经典模型。对倒立摆系统的研究,不仅可以有效反映控制中的许多典型问题、检验新的控制方法是否有较强的处理非线性和不稳定性问题的能力,而且可以将物理、数学等学科有机结合并进行综合应用。一级倒立摆系统是倒立摆系统中最简单、最基本的一种,被广泛应用在教学或控制方法研究方面,对一级倒立摆系统进行建模分析是处理多级倒立摆系统的基础。
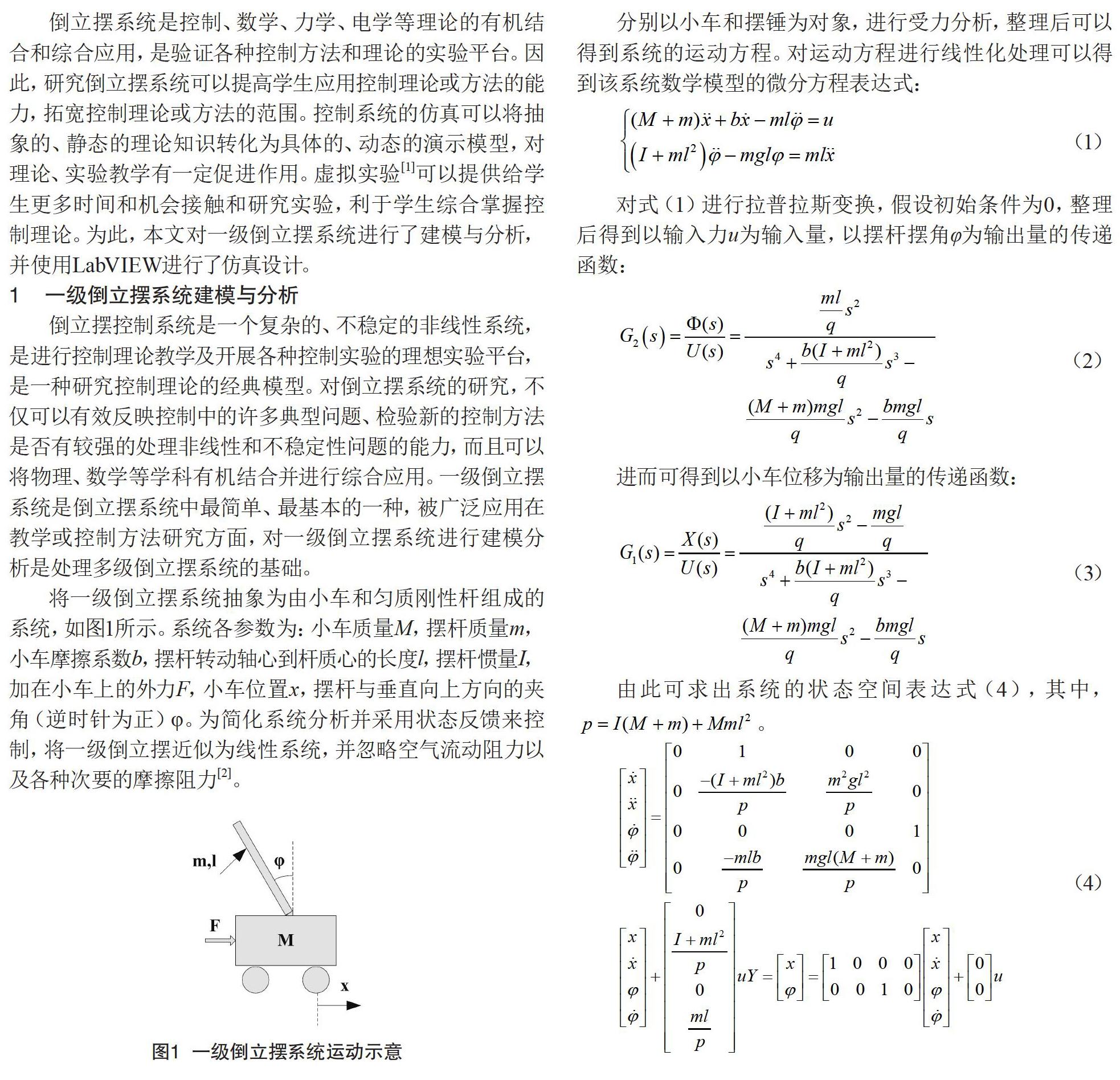
将一级倒立摆系统抽象为由小车和匀质刚性杆组成的系统,如图1所示。系统各参数为:小车质量M,摆杆质量m,小车摩擦系数b,摆杆转动轴心到杆质心的长度l,摆杆惯量I,加在小车上的外力F,小车位置x,摆杆与垂直向上方向的夹角(逆时针为正)φ。为简化系统分析并采用状态反馈来控制,将一级倒立摆近似为线性系统,并忽略空气流动阻力以及各种次要的摩擦阻力[2]。
求解黎卡提方程的解阵P,进而可确定最优反馈增益向量,最优控制规律由(7)式给出。由此可见,选取合适的Q和R加权矩阵来确定向量K的各元素是基于二次型性能指标的最优控制系统的设计的核心与关键。求解黎卡提方程的解阵P,进而可确定最优反馈增益向量。基于LQR方法设计的控制系统,实际上是采用状态反馈的闭环控制系统。设计后的闭环系统框架如图2所示,其中,虚线框内为原系统,K为状态反馈增益向量,N为输入增益(使输入与反馈的量纲相匹配)。
3 实时仿真软件设计
前文对一级倒立摆系统进行了分析建模,并设计了LQR控制器。对于建立好的系统,需要对其进行仿真测试,检验其正确性。该部分介绍了人机交互仿真软件的设计。为使仿真操作更加简单、响应结果更加直观,使用LabVIEW开发平台,设计了一款实时仿真软件。该软件可以输入初始状态和一些系统参数,可以获得系统在该条件下的响应,并输出相应的响应指标。如果输出指标与预期不符,可以更改输入系统参数,不断改进,最终使系统性能达到预期。
软件具体的执行流程为:首先,输入系统参数与初始状态,建立系统的微分方程组;其次,使用“龙格—库塔法”求解系统微分方程组,得出该时刻状态变量值;再次,计算出控制量u的值,并将该值加载到仿真硬件上,形成反馈;最后,状态变量的数值可以使用LabVIEW的绘图控件动态显示在软件界面上,使一级倒立摆系统的控制过程以及运动过程更加直观,更加符合教学以及研究的使用需求。
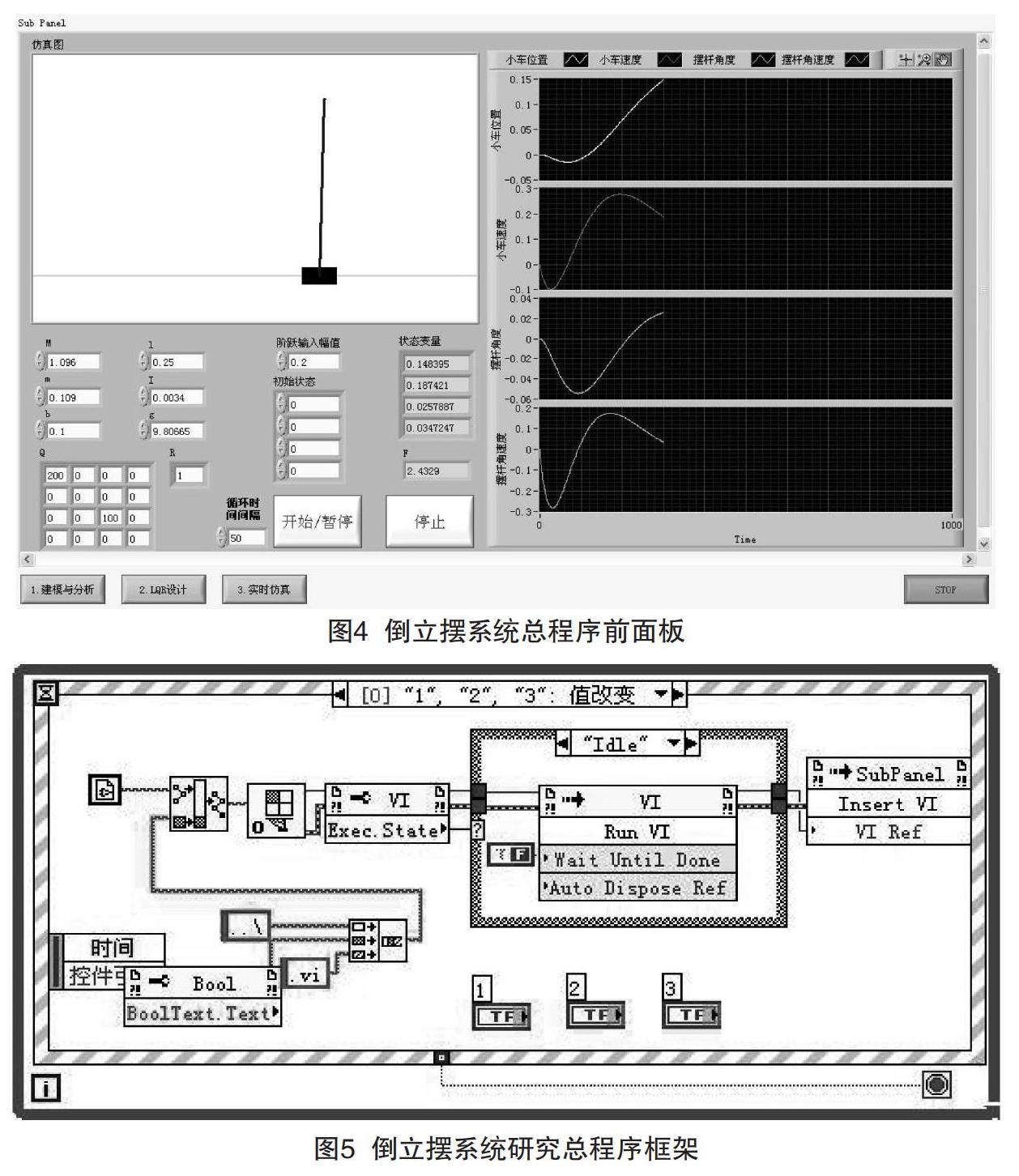
通过以上算法可以设计一级倒立摆系统建模与分析、LQR设计和实时仿真的LabVIEW程序,但各个VI程序相互独立,采用LabVIEW的动态调用将各个子VI有机结合。同时,软件采用动态载入界面方式载入界面,不仅可以使界面更加简洁,而且可以减少计算机内存的占用。系统总程序前面板如图4所示,系统总程序框架如图5所示。
4 结语
本文对一级倒立摆系统进行了建模与分析,设计了系统的LQR控制器。针对控制理论教学的实际需求,使用LabVIEW作为开发工具,对系统和控制器进行了仿真,并开发了一种实验教学仿真软件。该软件操作简单、易懂,便于推广使用。经试用,该软件可以应用在控制理论教学的实践环节,也可以应用在与此相关的理论研究方面,有一定的实用价值。
[参考文献]
[1]黄松岭,吴静.虚拟仪器设计基础教程[M].北京:清华大学出版社,2008.
[2]王孝武.现代控制理论基础[M].2版.北京:机械工业出版社,2006.
[3]豆丁网.National instruments corporation.control design toolkit user manual[EB/OL].(2016-10-21)[2019-08-20].https://www.docin.com/p-1762190439.html.
[4]齐晓慧,黄健群,董海瑞,等.现代控制理论及应用[M].北京:国防工业出版社,2007.
[5]邢继祥,张春蕊,徐洪泽.最优控制应用基础[M].北京:科学出版社,2003.