
海上无人机搜救技术研究
2019-12-04 04:11朱武斌
价值工程 2019年31期
朱武斌
摘要:无人机对海上船舶搜救发挥着重要作用,具有高视角、强灵活性、快速高效等优势,本文对无人机的的目标识别定位、机载通信以及海图坐标转换进行了研究和探讨,提出了利用射影交比不变性原理对无人机进行海上目标定位,结合ECDIS和AIS显示系统对船舶进行搜救,在近海实验表明,无人机在不同高度其定位精度保持0.2%以内,与AIS定位在海图显示系统GPS定位误差很小,符合海上船舶搜救视觉范围内,有效的提高船舶搜救效率。
Abstract: UAVs play an important role in the search and rescue of marine vessels. They have the advantages of high viewing angle and strong flexibility, and are fast and efficient. This paper studies the target recognition and positioning, airborne communication and chart coordinate conversion of UAVs. This paper proposes to use the principle of projective ratio invariance to locate the target of the unmanned aerial vehicle. The ECDIS and AIS display system are used to search and rescue the ship. The offshore experiments show that the positioning accuracy of the drone is kept within 0.2% at different heights. Positioning with AIS in the chart display system GPS positioning error is very small, in line with the visual scope of the sea ship search and rescue, effectively improving the efficiency of ship search and rescue.
關键词:无人机;船舶搜救;识别与定位;无线通信;坐标转换
Key words: UAV;ship search and rescue;identification and location;wireless communication;coordinate transformation
中图分类号:U675.7 文献标识码:A 文章编号:1006-4311(2019)31-0161-03
0 引言
随着国家经济的发展,海上活动不断增加如海洋捕捞、近岸工程建设以及海洋测量等交织在一起,呈现出高密度、多元化趋势,海上交通环境复杂多变,海难事故态势高发,船舶间的碰撞危险系数增大。海上船舶搜救受气候条件及水深的制约,搜寻效率和救助准确性低,而无人机快速、高效、便捷的搜救效率是船舶搜救的有效补充。
在智能装备高速发展的今天,无人机逐渐从军用转型到民用,例如海上搜救、海事管理、海洋探测与测绘等领域,无人机的应用在各方面都已得到高度认可,无人机搜救主要应用在陆地领域,陆地定位具有目标明显且信号传输稳定等优势,海上搜救研究主要集中在目标智能识别、无人机微型传感器的搭载、机载通信信号的稳定传输等关键技术层面上,本文研究了搜救中的目标识别和定位,探讨了无人机射影屏幕坐标、搜救中地理坐标以及墨卡托海图坐标之间的转换,重点研究了射影交比不变性解算海上目标坐标点,并对数据进行了分析,提高搜救的效率。
1 无人机搜救技术研究
1.1 无人机目标智能识别
海上物标识别相比陆地环境复杂多变,受海况影响较大,搜救的关键是目标识别算法的准确性和实时性,选择合适的识别方法和算法有利于提高搜索效率,在人工智能技术发展的今天,目前基于卷积云神经网络的目标识别方法有三种,包括R-CNN、yolo以及SSD系列等,三者在识别领域有着不同的区别如表1。
以上三种方法需要加速运算速度才能满足海上作业要求,传统的识别方法很难适应海上物标,机器学习作为主要的识别方法可以满足海洋大数据的处理,利用深度学习和强化学习实现目标的快速检索识别,夜间目标识别可搭载光电吊舱冷红外传感器目标进行探测,采集的红外数据经过船基或者岸基处理,实现夜间搜救识别和人员生命状况探测。
1.2 无人机目标定位
无人机目标定位在陆地上是预先对固定区域进行信息采集,再基于特征匹配、坐标解算以及生成底图来实现无人机目标定位,无人机在海洋水域定位则变得更为复杂,各传感器信息采集过程干扰多并且数据粗糙精度低,利用基于射影几何定理的视觉定位算法可以简单、快速、较高精度解决目标定位问题。再通过坐标转换进行海图显示。其基本思路是利用成像平面的已知坐标点和目标成像点,通过射影交比不变性解算海上目标坐标点。
目标定位过程中需要选取两个计算平面——目标地理平面β和摄影成像平面β′,在海面上通过卫星等手段获取β平面内两直线De、Dm上已知坐标点,分别是(E1、E2、E3、M1、M2),对应的β′平面内两直线De′、Dm′上已知图像点为(E1′、E2′、E3′、M1′、M2′),通过已知点M1′、M2′与目标成像点O′相交于B2′、B1′,利用交比不变性获得海面对应交点B2、B1,再用β平面点直线相交得到目标点O,如图1所示。
定位解算中数学表达式包括成像平面求交点B1′与B2′,射影交比变换以及目标定位O坐标的计算三部分,各部分函数关系式如下:
B1′(x,y)=F(M2′,O′,E3′,E1′) (1)
B2′(x,y)=F(M1′,O′,E3′,E2′) (2)
(B1′,E1′,E2′,E3′)= (3)
F(M2,B1,M1,B2)=O(x,y) (5)
联合上面(1)~(5)式解算出目标点O的坐标。如果无人机定位GPS信号弱或者短暂消失,可以利用此方法反向自定位,实现反向定位。未来还可以利用AR技术,视频与海图进行三维重叠,协助搜救定位。
1.3 机载通信研究
通信作为搜救的桥梁,能够实现船-机、机-岸以及船-岸等沟通,通信设备通常包括:机载VHF、AIS、北斗以及高精度RTK等等。无人机作为海上船舶搜救装备,近岸搜救可以通过机载VHF和AIS实现船基、岸基的短程通信,远海搜救则利用北斗RDSS和RNSS集成或者高精度RTK模块,实现定位和通信,并且可以利用机载VHF、AIS和视频摄影进行海面的搜索,通过卫星链路传输AIS数据,增大被困船舶AIS的发射范围,利用接收的AIS数据信息建立最佳搜救通道,未来无人机还将参与海洋组网建设,连接卫星数据、海洋观测平台以及海底智能观测网等,为海洋搜救提供更多的数据支撑,实现海洋立体搜索功能。
1.4 海图坐标转换
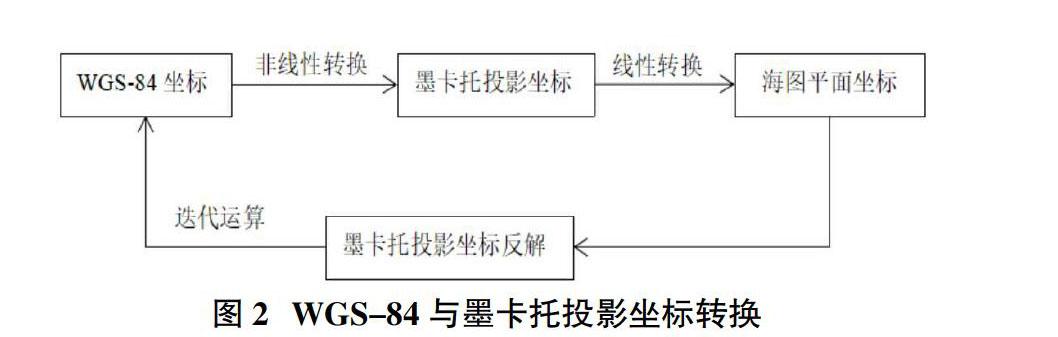
电子海图(ECDIS)作为海上交通助航设备,在搜救指挥中发挥着重要作用,通过坐标转换可以实现海上搜救目标在电子海图上的显示,海上船舶搜救采用的定位坐标是基于WGS-84坐标系统,电子海图采用的是墨卡托投影,转换流程如图2所示。还可将无人机位置进行显示,辅助救助和无人机航线规划。
在绘制海图时将WGS84坐标通过投影正变换转换成平面直角坐标系,相关转换公式如下:
上式中x、y为墨卡托直角系坐标,?渍、?姿为大地坐标系经纬度;?渍1、?姿1为墨卡托基准经纬度。
r——基准纬度的纬线圈半径;
N——椭球的卯酉圈曲率半经;
q——等量纬度;
e——椭球的第一偏心率,a、b为椭球的长短轴,
经(1)~(4)联合计算到(x,y)墨卡托投影坐标绝对值。由于海图坐标原点不是零点,故可以通过简单的坐标平移即可得到。海图坐标到用户屏幕的显示需要通过坐标系和屏幕像素点坐标转换,计算像素的实际距离进行转换,考虑到参考系不同即可。
无人机在船舶搜救中结合电子海图显示,可以快速清晰的显示船舶位置,并且可以通过已知搜索到的海图显示的AIS目标,经过坐标反解确定海上目标坐标三维信息,在能见到度不良的海况下指导船舶救助,达到航线规划的目的。
2 近海实验数据分析和验证
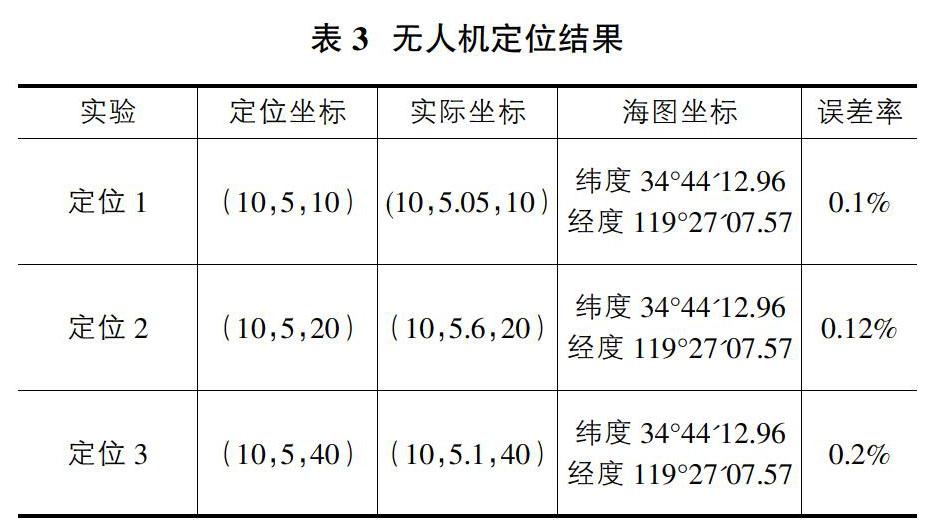
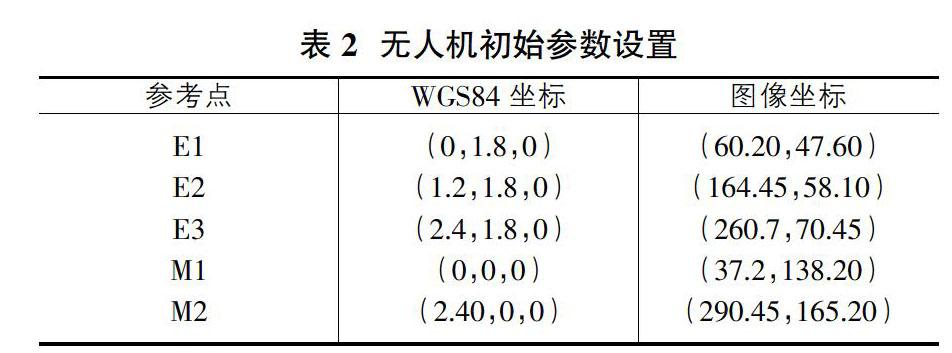
在连云港港水域利用多旋翼无人机KWT-X6H为实验平台,搭载机载AIS、机载摄像机以及甚高频中继器等传感器设备,对采集的数据经实验中心进行噪音滤除等处理,并对无人机定位实验数据进行算法仿真,实验结果和海图显示如表2、表3。
对实验结果分析表明,无人机定位在同一海况不同高度情况下视觉自定位和反向定位具有很强的稳定性,三次实验数据表明定位误差在0.2%以内,高度越高定位精度越差,该方法能有效避免摄像机变焦导致的内部参数变化,不需要不断的执行定位任务,在AIS和GPS信号中断的情况下,可以利用射影交比不变性对目标进行定位或者反向定位,算法能够实现无人机对搜救船舶搜救的高效性,并且通过机载通信系統实时显示目标的海图位置信息,为搜救带来极大的便利。
3 结束语
本文对无人机搜救中的目标定位与识别进行了探讨,利用坐标转换实现无人机、搜索目标以及用户的位置交互,解决气候原因导致的无人机视频搜索效果差的难题,在近岸水域进行了实验,取得了比较好的实验效果,为船舶搜救提供了新的思路。
参考文献:
[1]张琪.无人机低空遥感船舶影像航行数据采集稳定性测试[J].舰船科学技术,2018,40(24):148-150.
[2]杨小川,王运涛,黄勇,等.基于油电混合动力的中小型无人机及其作战应用展望[J/OL].飞航导弹,2018:1-6.
[3]RedmonJ, Farhadi A. Yolo9000: Better, Faster, Stronger[C]//Proceedings of the IEEE Conference on Computer?Vision and Pattern Recognition, 2017:6517-6525.
[4]张凯,张好运,卢旭升,等.无人机海岛礁航空摄影测量技术应用[J].测绘通报,2018(09):87-90.
[5]曹德胜,桑凌志.无人机水上遇险搜救关键技术研究[J].交通运输研究,2017,3(03):62-68.
[6]鲁娟.无人机在海上舰船目标识别中的应用[J].舰船科学技术,2017,39(12):182-184.
[7]周立,张阳,张一,等.无人海洋测绘技术体系构建[J].测绘通报,2019(04):130-133.
猜你喜欢
农家科技下旬刊(2016年9期)2016-12-15
人间(2016年26期)2016-11-03
现代电子技术(2015年18期)2015-09-16
