基于MATLAB的车牌定位技术研究
2019-12-02 02:31张萍陆淑勤徐海峰
科技视界 2019年32期
关键词:边缘检测
张萍 陆淑勤 徐海峰

【摘 要】利用MATLAB软件的强大功能,通过对采集到的车牌图像进行灰度化、去噪、边缘检测、形态学滤波等,完成了MATLAB环境下的仿真,最后实现了基于灰度边缘检测的车牌定位。实验结果表明,该方法去噪效果较好,简单方便,定位快、成功率高。
【关键词】MATLAB;车牌定位;灰度化;边缘检测
中图分类号: TP391.41文献标识码: A文章编号: 2095-2457(2019)32-0038-002
DOI:10.19694/j.cnki.issn2095-2457.2019.32.015
Research on License Plate Location Technology Based on MATLAB
ZHANG Ping LU Shu-qin XU Hai-feng
(Electric power Department Yinchuan
【Abstract】Using the powerful functions of MATLAB software, through graying, denoising, edge detection and filtering of the collected license plate images, the simulation under the environment of MATLAB is completed. Finally, the license plate positioning based on gray edge detection is realized. The experimental results show that the method has good denoising effect, simple and convenient, fast positioning and high success rate.
【Key words】MATLAB; License plate location; Grayscale; Edge detection
0 引言
隨着社会的发展,机动车数量不断递增,城市交通面临巨大压力,车牌定位及车牌识别成为智能交通管理的研究热点。车牌定位的准确与否会直接影响到后面字符分割和识别的准确率,也直接影响着车牌识别系统的整体性能和稳定性[1]。本文在研究了国内外己有的各种车牌定位方法的基础上,结合了我国车牌的特征,在MATLAB环境下,对采集到的车牌图像进行灰度化、去噪、边缘检测、形态学滤波等,实现了基于灰度边缘检测的车牌定位,且经过实验,获得了较好的效果。
1 车牌定位
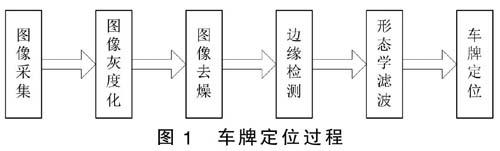
车牌定位就是从给定的车牌图像中找到车牌区域的位置,并将车牌所在局部区域从整幅图像中分割出来,为后续的字符分割、识别奠定基础[2]。本文采用基于灰度图像的边缘检测的方法实现车牌定位。车牌定位的过程是:首先对采集到的车牌图像预处理进行灰度化,将彩色的车辆图像灰度变换为黑白两色图,进行去噪处理;然后利用各种算子进行图像边缘检测及二值化,经过分析比较得出一种较满意的算子;结合数学形态运算,将边缘检测后的图像进行腐蚀、闭合运算处理,再利用函数删除图像中影响车牌区域的小对象,利用矩阵运算确定车牌区域,以提取出车牌。具体过程如图1所示。
图1 车牌定位过程
1.1 图像的灰度化
实际应用环境中获取到的车牌图像都是彩色图像,可由于所获取的彩色车牌图像有可能颜色退化,或者受到其他一些因素的干扰,反而增加了车牌定位的难度。灰度图像因其包含信息量小、保存完好的色度与亮度的特征分布、占用空间少、处理速度快等优点,被广泛应用于车牌定位。图像灰度化就是把彩色图像转换为研究所需的灰度化图像。
常用的图像的灰度化方法较多,如最大值法、平均值法和加权平均法等。本文采用加权平均法,它是根据视觉对不同颜色的敏感程度或其它因素,将三个变量冠以不同的权重再求和,应用最为广泛[3]。权值的选取不同,所得到的灰度图像的亮度是不一样的。从人眼的视觉效果上来考虑,结合前人研究的大量实验,本文选取了权值分别为0.30、0.59、0.11进行了灰度化处理,所得到灰度图像效果表现地更好。计算公式如下:
Y=0.30×R+0.59×G+0.11×B
式中R、G、B 分别是彩色图像的3 个基本分量信息,Y 是灰度图像的灰度值。
图像灰度化在MATLAB仿真中采用的函数是rgb2gray(),其作用是将原图像转换为灰度图像。调用格式为:I=im2gray(filename)。
1.2 图像去噪
在图像的采集、传输或处理的过程中,会经常有大量的随机冗余信息夹杂其中,这些图像中的干扰信号称为噪声[4]。减少或消除数字图像中噪声的过程称为图像的去噪。中值滤波器在对付并处理随机噪声的效果上非常好,同时,它对消除椒盐噪声特别管用,因此中值滤波被广泛地使用[5]。本文采用中值滤波法进行去噪,去除了多余而无关的噪声,同时也完好的保护了图像的边缘信息。
1.3 边缘检测
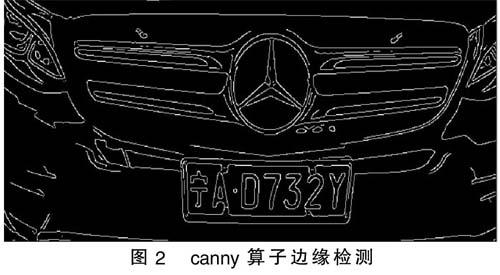
图像边缘是图像的一个相当重要的特征,边缘处理主要是增强图像中亮度变化明显的点并通过微分使图像边缘更加清晰。典型的边缘提取方法是利用边缘邻近一阶或二阶方向倒数变化规律,将图像中灰度有阶跃变化的像素找出来[6]。本文针对车牌图像边缘检测常用的roberts、prewitt、canny等几种算子进行了研究并在仿真实验中进行了比对,实验结果发现canny算子边缘检测使用两种不同的阈值分别检测强边缘和弱边缘,并且仅当弱边缘与强边缘相连时,才将弱边缘包含在输出图像中,这种方法不容易受到噪声的影响,能够检测到真正的弱边缘。本文采用canny算子完成边缘检测。如图2所示。
图2 canny算子边缘检测
1.4 形态学滤波
边缘检测去除与目标对象无关的一些信息,并且成功地保存和提取车牌图像的有效边缘。但仍然存在一些区域边缘的横向干扰,需进一步的排干扰处理。这里采用数学形态学的方法处理来达到滤波的目的。数学形态学是一种非线性滤波运算,主要用于处理图像中关于形态的问题,如提取边界、孔洞填充、提取骨架等。其特点是不影响图像的细节和边缘,抗噪性能好,简化形状结构[7]。数学形态学主要的运算方式包括膨胀、腐蚀以及开、闭运算。本文是在对图像进行边缘检测后,利用形态学的腐蚀、闭合两个基本运算的组合得到图像中的连通域,然后使用bwareaopen函数移除不符合车牌特征的小对象,进而定位出车牌。
1.5 车牌定位
利用车牌的连续特性,采用行扫描法对车牌区域进行定位。根据车牌通常悬挂在车辆下部的特点,本文车牌定位算法采用从上而下、从左到右的方式对图像进行扫描。车牌包含的7-8个字符分布集中,且排列规则,扫描时通常情况下每个字符会出現两次跳变。加上车牌还有两个竖直边框,车牌字符就变成了9-10个,再考虑到字符可能会存在模糊、部分损坏、倾斜等现象,这里将跳变阈值设置为24,结果发现得到的效果很好。采用行扫描后,得到的车牌定位图如图3所示。
图3 车牌定位结果图
2 车牌定位结果分析
为了验证本文中的算法,采集了200张不同条件下拍摄的车辆图像进行了多次的仿真实验。试验后统计结果发现,能够准确定位的图像是192张,车牌定位的成功率为96%,每幅车辆图像的定位运算时间为0.896s。实验结果比较成功,但是仍有定位出错的结果。将定位出错的8个实验结果进行分析,原因可能是:一是采集图像时受到天气、光线等多种因素的影响,采集到的车牌图像质量有所差异导致定位不准确;二是实际应用过程中,车牌会出现不同程度的污染或磨损,使得车牌不够明显导致了车牌定位失败。对于以上问题,只要提高摄像机的配置或者保证车牌的洁净度即可有效解决车牌定位问题。
3 结论
车牌定位是车牌识别系统的关键部分,车牌定位结果车牌识别的速度和识别率[8]。本文首先对车牌定位系统的现状和已有的技术及算法进行了研究,针对我国车牌,利用MATLAB软件,设计了车牌定位仿真程序,在操作过程中对拍摄的车辆图像进行了灰度化、去噪、边缘检测、滤波等预处理,并对预处理中边缘检测各算子进行分析、比较,实现了基于canny算子边缘检测的车牌定位。实验结果表明,这种方法能够适用不同尺寸的图片精确定位到车牌位置,算法简单,通用性好,具有较好的准确性和实时性。
【参考文献】
[1]蔡秀梅,周川力.基于直线检测和数学形态学的车牌定位算法[J].计算机与数字工程,2018(8):1643-1646.
[2]罗山,李玉莲.车牌定位方法综述[J].山西电子技术,2019(1):94-96.
[3]马轩.车牌识别关键技术研究[D].西安:西安电子科技大学,2014.12:7-9.
[4]张婷婷,马杰,刘新艳,葛岭岭.低秩遮挡图像去噪方法[J].光电子·激光,2015,26(1):184-191.
[5]陈佳.基于形态学的车牌定位方法的研究与应用[D].衡阳:南华大学,2015,5:21-22.
[6]董欣.车牌精确定位算法探究[D].杭州:浙江大学,2017,1:13-15.
[7]李忠海,梁书浩,杨超.基于数学形态学和颜色统计的车牌定位方法[J].科技风,2018(3):1-3.
[8]侯向宁,刘华春.基于颜色分割与sobel算子相结合的车牌定位[J].计算机技术与发展,2018(8):156-159.
猜你喜欢
山东工业技术(2016年24期)2017-01-12
计算技术与自动化(2016年4期)2017-01-11