
基于多波束测深系统的隧道沉管覆土及沉降变化研究
2019-11-30 10:21胡玗晗
科技资讯 2019年27期
胡玗晗


摘 要:该文基于RESON多波束测深系统对上海市某隧道沉管外部覆土厚度及沉降变化进行监测,利用多波束测深技术精度高、全覆盖、高密度的特性,经声速改正、潮位改正、姿态矫正获取密度0.5m的隧道河床坐标及高程点云数据;基于高精度曲面模型(HASM)構建隧道覆土三维显示模型,真实反映隧道河床地貌,推算隧道各沉管覆土厚度及沉降变化,并与往期数据对比反映阶段性变化。该文技术成果为水下工程覆土及沉降监测提供一种新的方法和测量手段,提高作业效率,并具有较高精度。
关键词:多波束测深系统 水下沉降监测 覆土检测 水深测量
中图分类号:U456.3 文献标识码:A 文章编号:1672-3791(2019)09(c)-0001-03
多波束测深河床成像技术是一种基于换能器阵列发射扇形声波,再接收换能器阵列接收声波的窄波束信号的水下探测方法,通过发射、接收声波的正交性,探测扇形声波所能达到河床被测点水深值[1],结合精密定位技术,从而能够精确、快速地测出河床地形、坐标、高程变化,经数据处理后,可提供较为精确的河床地形三维特征。近年来,多波束测深在水下工程的探测中的应用广泛,也日趋成熟,且多应用于水下环境地貌识别,而在水下工程覆土及沉降变化方面的应用较少。
多波束测深系统在实际应用中存在较多误差来源,包括系统固有误差:艏向传感器、姿态传感器、定位系统误差、声速传感器、运动传感器以及外部环境误差影响:潮汐改正、噪声影响、水体气泡影响、水质环境等[2]。由于多波束测深误差因素较多,导致该技术在水下海洋工程中的监测精度不够,应用较少;但在外部环境稳定的城市内河水下工程监测应用中,基于CORS定位技术以及高精度传感器具有适用性。
1 多波束测深数据
1.1 数据采集
多波束测深数据采集位于隧道正上方位置,利用RESON 7125多波束测深仪测量隧道上方河床,设置10条航带,覆盖整个航道上下游区域;数据采集密度0.5m。多波束声纳阵列发射扇形波束,并接收记录每条波束的回波信号,利用滤波减少二次回波及杂波的影响,获得测深点云数据。
1.2 数据结构
多波束测深数据经吃水改正、潮汐改正等处理后,导出数据点云,数据类型分为Excel点云坐标数据及DWG数据类型,多波束测深数据经抽稀后获得隧道河床点云,数据包含点云坐标及高程信息,红色线为隧道上下游20m处及中心线。
2 处理方法与结果
2.1 水下数字地形模型
水下数字地形模型(DTM)构建受海水因素影响,在较短时间条件下,具有一定程度的变化;但其建模方法与陆地地形构建方式大致相同,基于数字高程模型(Digital Elevation Model)拟合采样点数据构建数字地形模型(DTM)。常用的DTM构建方法如不规则三角网法(TIN)、规则格网法、等高线法等[3],多波束数据集特点表现为点云密度大,采集间距小,分辨率高。为发挥多波束数据特点,该文采用规则格网法(GRD)和不规则三角网法构建隧道河床数字高程模型。基于离散数据点进行内插拟合,构建出数字地形模型(DTM),其中内插离散高程点算法主要有克里金法(Kriging)、距离反比权重法(Invers Distance Weighted, DW)、多项式法等。
2.1.1 规则格网法(GRD)
规则格网法是一种划分单元网格建立高程矩阵,每个格网对应一个高程信息,通过插值方法计算每个点的高程;经拟合后构建出连续的高低起伏的数字地形模型的方法[4]。格网DEM处理简单,方法易理解;但具有冗余量大,不适用与地形起伏复杂较大区域,地形结构及细部表达不准确等缺点。为提高格网构建精度,岳天祥提出基于规则格网的高精度曲面建模(HASM)将采样点的数据进行插值而得到f的近似值,获得最佳迭代方程及结果,Kriging和IDW误差阶较小,且HASM收敛速度大于经典曲面模型[5]。该文基于格网法的高精度曲面建模,通过Matlab构建隧道河床精细三维地形模型。对于曲面,x和y方向上的步长分别为,;高精度曲面模型最佳迭代模拟方程为:
2.1.2 不规则三角网法(TIN)
不规则三角网将高程离散点连接成连续的不规则的三角形,由离散点位置三角形的形状、大小等分布特点,再将高程离散点拟合成连续变化的数字地形模型。常见的不规则三角网法包括Bowyer法、狄洛尼(Delaunay)法等。
Delaunay三角网构建连续相邻的不同大小、面积的三角形,每个三角形的外接圆均不包含离散高程集点中的其他任意点保证连续高程信息的表达,且高程信息受三角形顶点离散高程的控制。Delaunay三角网适用于不同类别地形,拓扑关系简单,冗余小比较适合大规模海底地形建模[6]。
2.2 成果分析
2.2.1 三维地形成果
对多波束测深原始数据经处理后的隧道河床高程点云数据进行基于规则格网的高精度曲面建模,点云数据275618个,建立长、宽150m×450m的带状河床地形,获得高精度高分辨率的三维河床数字地形模型及二维等高线。根据数据显示,河床整体成半U型,从左至右呈递增趋势,河床最深处平均高程-14m;但在Y坐标3250处出现河床陡坎,高程由-8m骤增至-2m。隧道完工时期2012年河床地形及等高线,河床地形呈连续递增趋势,河床深处平均高程-14m。经对比,可看出此次多波束测深成果反映近几年河床变化,Y坐标在3150~3250间,河床地形高程变化较大,表面隧道覆土量变化较大。
2.2.2 覆土量对比分析
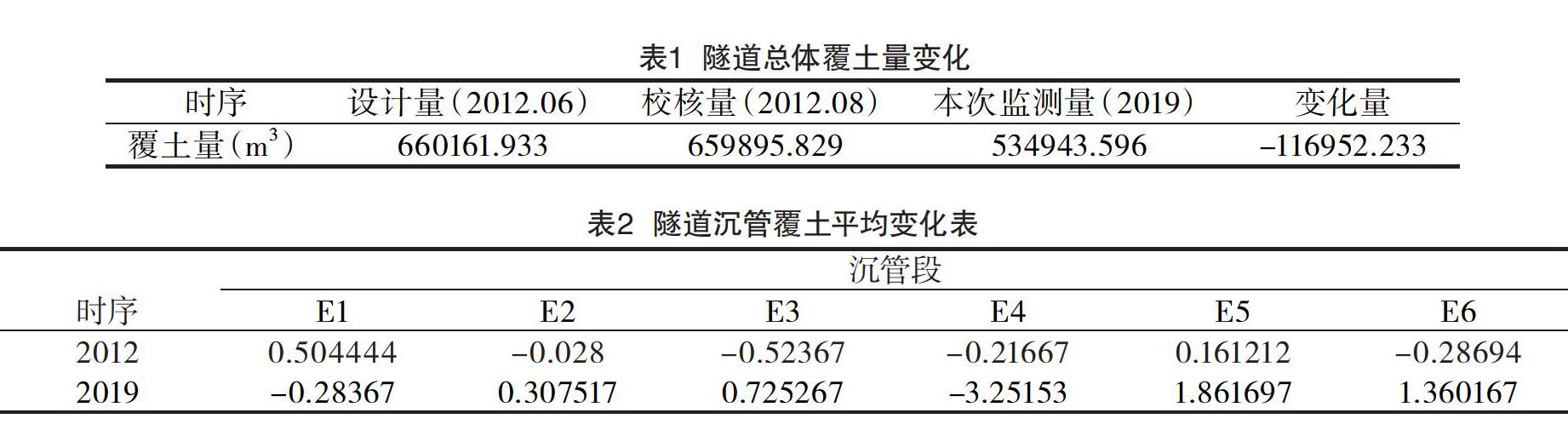
根据隧道河床三维地形比较2012年6月、8月以及此次多波束测深成果相对于隧道沉管顶部高程的隧道河床覆土量变化。
隧道河床覆土量变化对比采用将隧道河床划分中心线上游20m处、隧道中心线处以及隧道中心线下游20m处三段实现隧道覆土变化比较。根据相关数据显示,在2012—2019年期间,隧道中心线上游20m处覆土量在E1、E2沉管段保持不变,但E3~E6沉管段具有较大差别,且E4沉管段覆土量有明显减少。隧道中心线及下游20m处隧道河床覆土量均表现为E4沉管段覆土量大幅减少,E5沉管段覆土量增加;其他沉管段覆土量变化较小,如表1所示。
依据基于高精度曲面建模(HASM)结果,由于隧道沉管上方河床地形并不均匀,取各沉管覆土高程平均变化量作为分析因子,进行对比如表2所示,分析可得沉管E1~E3变化较小,E4~E6变化量较大,其中E5~E6呈递增趋势,E4覆土厚度减少较多,达-3.25m。
2.2.3 各沉管沉降变化分析
经水准采集隧道实际高程数据,与隧道沉管覆土平均变化进行对比,得到覆土变化与隧道沉管沉降变化关系。沉管沉降变化与沉管上方覆土变化具有较为明显相關性,由E4、E5、E6沉管月变化量较大,覆土厚度减少,沉管呈上浮趋势;反之,淤积引起覆土厚度变大造成沉管下沉。通过分析覆土月变化与沉降变化之间的相关性,其相关系数达-0.80455,反映出沉降变化与沉管覆土变化呈负相关性(见表3)。
3 结语
多波束测深技术在近年来越来越多的应用于海洋工程勘察、水下物体探查、水下地形测量等多种方面,具有高效率、高分辨率等特点,但由于水下环境及水上气候、水文条件等条件限制,导致多波束测深系统在水下点云精度要求较高的应用中受限。该文利用多波束测深系统应用于隧道河床覆土厚度监测及隧道沉管沉降变化分析,为多波束测深系统应用于内河水下工程监测与检测提供新的思路。此外,该研究表明隧道覆土厚度变化可以准确反映出隧道沉管沉降变化量,对隧道沉降监测提供良好的预警方法。
由于隧道沉降变化不仅受覆土厚度变化影响,还收到地质结构、土质、水压、水体浮力等多种环境的影响,后续将探索研究将引入以上影响因子构建基于多波束测深系统的隧道沉降动态监测模型的可行性。
参考文献
[1] 张志刚,郭俊,杨嘉斌,等.利用多波束水体成像数据进行管道气体泄漏检测[J].应用科技,2018,45(6):16-20.
[2] 肖波,刘方兰,曲佳.多波束测深系统误差源分析[J].海洋地质前沿,2012,28(12):67-69.
[3] 周培德.计算几何:算法分析与设计[M].北京:清华大学出版社,2000.
[4] 张军海.地理信息系统原理与实践[M].北京:科学出版社,2009.
[5] 岳天祥,杜正平.高精度曲面建模与经典模型的误差比较分析[J].自然科学进展,2006(8):986-991.
[6] Lawson CL.Transforming triangulations[J].Discrete mathematics,1972,3(4):365-372.
