分布式光纤传感在铁路通信光缆盗挖告警中的应用
2019-11-29 01:37:04杨芳南李红辉
铁路计算机应用 2019年11期
田 璞,杨芳南,李红辉,张 杰,刘 真
(1. 北京交通大学 计算机与信息技术学院, 北京 100044;2. 高速铁路网络管理教育部工程研究中心,北京 100044)
铁路通信光缆在铁路通信系统中的作用极为重要,它的安全会直接影响到铁路通信系统的正常运行。近年来,由于非法施工、人为盗挖等因素而经常引发一些破坏通信光缆的事件,不仅给国家的经济财产造成重大损失,而且对铁路系统的运营安全造成极大危害。
目前,在光缆防护工作中,主要应用以下4 种技术[1]:红外探测技术[2]、脉冲电子探测技术、张力式探测技术和智能视频分析技术[3]。这4 种光缆防护技术都存在误报率高的问题,且这些技术并不适用于长距离的监测,不能广泛地使用。分布式光纤传感技术是20 世纪70 年代末发展起来的一种传感技术,由于该技术能够实现长距离分布式监测,可全天候工作,适用于各种复杂地形,具有成本低、灵敏度高、抗电磁干扰、无缘、无盲区、可复用等优点,被广泛应用于管道防护、周界安防等领域。
1 分布式光纤传感技术
1.1 散射型分布式光纤传感技术
传感光纤受到外界环境影响时,会产生感应变化,散射型分布式光纤传感技术正是利用传感光纤中背向散射光发生的变化来实现感应的。光散射包括3 种类型:拉曼散射,瑞利散射,以及布里渊散射[4]。分布式光纤传感器的类型取决于散射光的类型。
1.1.1 基于瑞利散射的光时域反射技术
在光纤中有光脉冲传输时,会产生后向瑞利散射光。通过检测光的瑞利散射特性,提出了基于光时域反射仪(OTDR)的传感技术。当在光纤链路中发生非常规能量损失点时,在后向瑞利散射光中存在非常显著的变化,后向瑞利散射曲线也会出现变化,根据检测脉冲注入端这一信号的变化情况,可获取沿光纤的衰减程度大小和光纤散射系数分布情况。所以,OTDR 是具备分布式测量功效的。但是注入OTDR 的光脉冲是非相干的,而且需要检测光强度的损耗状况,因此限制了该系统检测物理参数的数量,特别是在检测瞬时振动信号的过程中。
OTDR 的原理,如图1 所示。
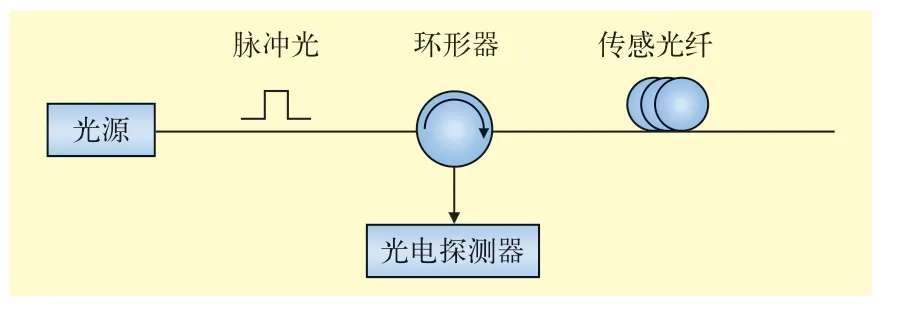
图1 OTDR原理图
1.1.2 基于布里渊散射的分布式光纤传感技术
布里渊散射的原理是入射光波与声波在传播过程中相互作用,这种相互作用会使光产生频移,频移会受到温度、应变的影响。布里渊散射光的频移与应变、温度的关系为:

该分布式光纤传感技术中,在光纤端口注入泵浦光脉冲,然后检测探测端处的后向布里渊散射光,可以得到散射光的频移,这样,通过式(1)和(2)就能计算出对应的应变信息、温度。基于布里渊散射的分布式光纤传感技术测量结果精度比较高,应用范围广,空间分辨率也较高。
1.1.3 基于拉曼散射的分布式光纤传感技术
激光光子与光纤分子的热振动之间相互作用会发生能量交换,进而产生反斯托克斯光和斯托克斯光。拉曼散射正是建立在这两种光的基础上的。其中,反斯托克斯光的光强会根据温度变化而发生变化,但是温度变化却不会影响到斯托克斯光的光强。因此,可以对比这两束光强,依据温度变化与光强间的对应关系,得到光纤中各个点的温度情况[5]。
1.2 相位型分布式光纤传感技术
利用干涉仪原理进行分布式传感法的技术称为相位型分布式光纤传感技术[6],通过光源发出相干光,经耦合器输出频率相同的两束干涉信号,利用光电探测器来具体测算通过干涉结构后的振动信号。该分布式光纤传感技术简单,而且响应灵敏度高,主要包含基于Michelson 干涉的分布式光纤传感技术、基于Sagnac 干涉的分布式光纤传感技术和基于Mach-Zehnder 干涉的分布式光纤传感技术,并可以通过不同干涉技术的特点进行组合,构成性能更优复合型干涉传感技术,例如基于双Mach-Zehnder 干涉的分布式光纤传感技术。
1.2.1 基于Michelson干涉的分布式光纤传感技术
在Michelson 光纤干涉技术中,光源发出相干光,经过耦合器后分为两路分别进入干涉仪的两个臂,经两臂末端反射后再次回到耦合器发生干涉。当传感光纤受到外界扰动时,两臂光纤之间相位差发生改变,从而导致探测器检测到的干涉信号的强度发生变化[7]。其基本原理,如图2 所示。
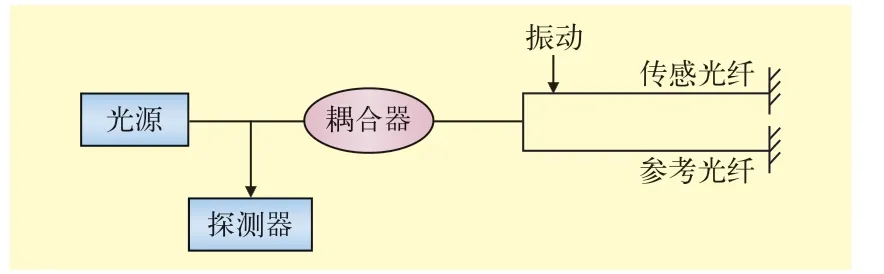
图 2 Michelson光纤干涉技术原理图
Michelson 光纤干涉技术必须要有效地屏蔽参考光纤,外界干扰对其影响很大,而且Michelson 光纤干涉技术有很大难度同时测量多点扰动,所以限制了其应用范围和前景。
1.2.2 基于Sagnac干涉的分布式光纤传感技术
在Sagnac 光纤干涉技术中,相干光从激光光源处发射,通过耦合器以后分成两个支路,按照逆时针和顺时针两个不同方向进行传输,然后经过Sagnac 环一周传输后回到耦合器进行干涉。外界干扰对其影响后,这两个支路光信号之间相位差发生改变,使得干涉信号的光强发生改变。其基本原理,如图3 所示。
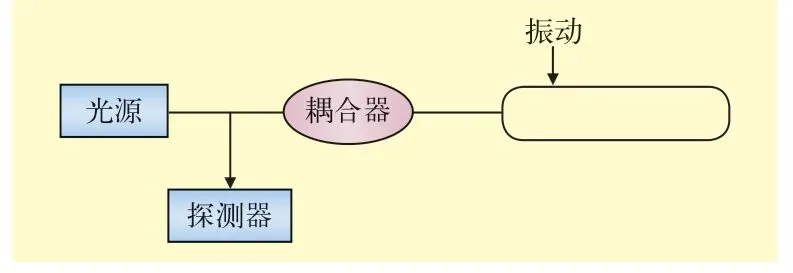
图3 Sagnac光纤干涉技术原理图
1.2.3 基于双Mach-Zehnder干涉的分布式光纤传感 技术
双Mach-Zehnder 干涉技术采用测时间差方法进行定位。光源发出相干光,经耦合器C1 分为两束。一束经过耦合器C2 分成两束进入干涉臂F1、F2,再经耦合器C3 进入干涉臂F3,最终经耦合器C4 发生干涉;另一束经过耦合器C4 进入干涉臂F3,再经耦合器C3 分成两束进入干涉臂F1和F2,最终在耦合器C2 发生干涉[8]。其基本原理,如图4 所示。
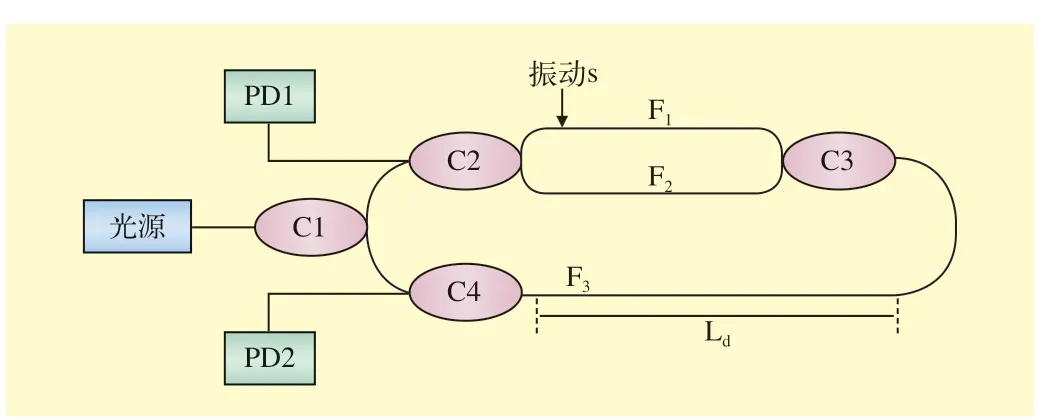
图4 双Mach-Zehnder光纤干涉技术原理图
假定监测总长度为L,延迟光纤长度Ld=L,当振动信号作用在s处时,光电探测器PD1 和PD2 探测到的干涉信号分别为:

式中,t1=ns/c;t2=n(Ld+L-s)/c;I0为光源的输出强度; 为干涉仪固有的相位差。两个探测器输出的信号之间的时间差Δt为:

由式(5)可知,只需测出时间差Δt即可计算出发生振动的位置。目前测时间差的方法大多是基于互相关的。
目前,双Mach-Zehnder 干涉技术已经获得了较为成熟的发展,其具有传感距离长、高灵敏度、抗电磁干扰和定位精度高等优点。因此,本文采用双Mach-Zehnder 干涉技术。
2 基于分布式光纤传感的盗挖告警方法研究
2.1 光缆盗挖告警的基本算法
在盗挖告警方法中需要对振动信号的类型进行识别,区别振动信号是由人为盗挖产生的,还是列车通过或天气情况产生的。振动信号识别需要考虑3个因素:信号特征提取,模式分类算法和模式识别效率。
传感光纤在处于正常情况时,其振动信号的幅值变化和振动频率都很小,而在受到外界振动影响时,振动信号的频率和振幅都会发生变化。所以,通过测量信号的时域特征和小波域特征作为识别振动事件类型的特征向量是可行的。
铁路通信光缆大部分时间均处于正常状态,检测到盗挖行为只是短暂的一段时间。因此,为保证监测系统的时效性,正常情况下,系统只对时域特征进行监测;当时域特征的值超出设定的阈值时,再对小波域特征进行监测,联合小波域特征作为特征向量进行模式识别,返回振动事件的类型,例如列车通过、行人通过、人为盗挖等,如果识别出人为盗挖的行为,则产生告警信号。这种两级振动模式识别方案,可以减少大量复杂的小波域变换计算,提高算法的时效性。算法实现流程,如图5 所示。
2.2 振动信号特征提取
2.2.1 短时过双阈值率
短时过零率是利用统计正负阈值转换过程中经过零阈值的数目来估计信号的频率的[9],一般用于处理语言信号。可以通过短时过零率得到信号的频率特征,但是得不到信号的振幅特征。所以,可通过短时过双阈值率来考量信号的时域特征。
通过设置信号的上下双阈值门限,计算信号在上下阈值中穿梭的次数,把短时过上、下阈值率相乘,得到短时过双阈值率。假设信号Xn(m) 的短时过双阈值率为Ld(n),则其计算公式为:

式中,Lup(n) 为短时过上阈值率;Ldown(n) 分别为短时过下阈值率;其计算式为:
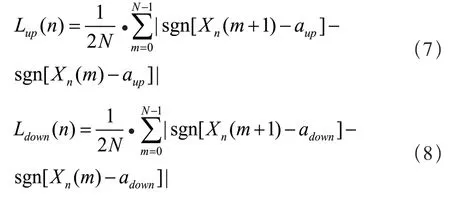
式中,aup为上阈值门限值,adown为下阈值门限值。
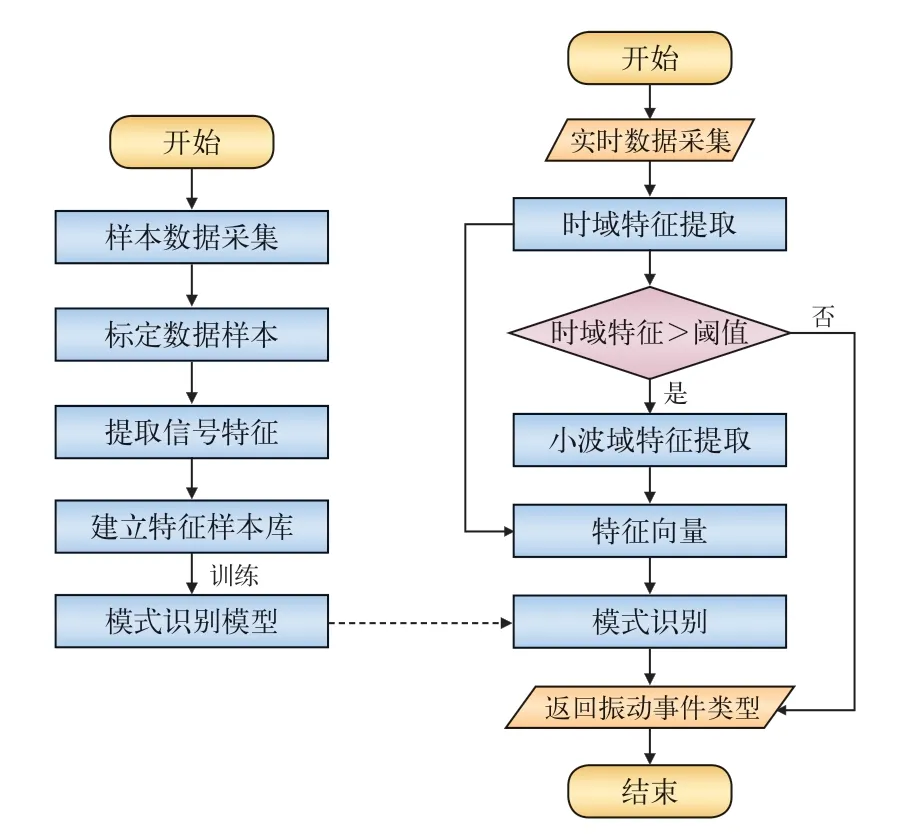
图5 算法流程图
2.2.2 基于离散小波分解的频段方差
与傅里叶变换相比,小波变换发展了局部信号分析的特点,是傅里叶变换的一种延伸,分析窗形状可以通过拉伸或收缩进行改变[10]。通过对频率较低的信号段频率上的细分和频率较高的信号段时间上的细分,可以对信号进行多分辨率多尺度的分析,扩大了傅里叶变换的应用范围。
Mallat 算法是一种有效、快速的离散小波变换方法[11],使用不同的细小尺度不断逼近需要进行分析的信号,极大地降低了离散小波变换的计算量。信号通过高通滤波器产生高频分量cD,通过低通滤波器后产生低频分量cA。在每一次分解中,保留信号的高频分量,而不断对低频分量进行分解,该分解过程经过M次迭代,最终形成M层分解。小波的重构是分解的逆过程,通过反向执行Mallat 算法,重构出原始信号。通过离散小波变换,得到信号在不同频带上的特征,假定信号的采样频率为fs,则第i层的小波重构系数所对应的频带范围为[2-(i+1)fs,2-ifs]。
信号在经过离散小波变换后被分解到不同频段,计算各层小波系数平均能量(σi)2的方差,将其作为特征参数:

其中,M为小波分解的层数;Eim为第m层小波系数的平均能量;Ei为各层小波系数的平均能量Eim的均值;其计算式为:
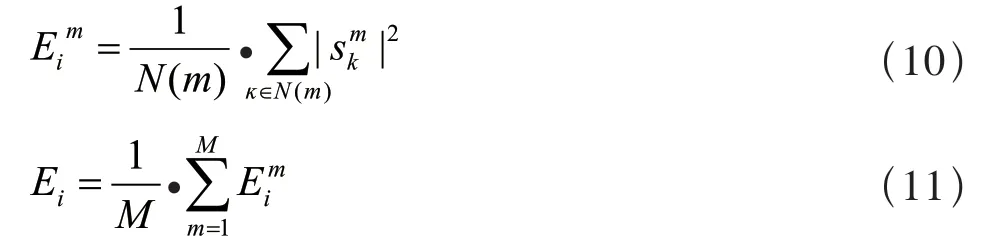
不同信号在不同频段上的分布是不同的,通过分析不同振动信号的小波系数能量在各个频段的分布情况,可以作为对振动事件检测的一个特征参数。
2.3 振动事件分类
2.3.1 SVM分类
SVM 方法是通过创建多维分类超平面进行决策的,目的是实现两类数据正反例之间的支持向量的距离最大化。SVM 分类的重点是选择核函数,正确选择核函数可以将低维空间难以线性划分的问题转换到高维度上,并且不会增加问题的计算复杂度。核函数一般为4 类,分别为:
线性函数:K(x,xi)=x•xi;
多项式函数:K(x,xi)=(xTxi+1)p;
二层感知器函数:K(x,xi)=tanh[γ(x • xi)+r]。
这4 类核函数中,径向基函数对应的特征空间具有无穷的维数,这样小样本问题一定是线性可分的,故而径向基函数在核函数中应用最广。因此,本文选择径向基函数作为核函数。
SVM 算法中,惩罚项参数太高会引发SVM 分类器出现过拟合状况,降低SVM 分类器的泛化能力,选取适当的核函数参数和惩罚项参数非常重要,本文选择遗传算法对SVM 分类方法进行优化。
2.3.2 基于遗传算法的优化
遗传算法是一种借鉴生物进化过程的求解全局最优化问题的随机搜索算法,具有实用、高效、鲁棒性高的特性,遗传算法优化SVM 的流程如下[12]:
Step1 :生成初始种群,从待分类的点集中随机选择N 个点作为初始种群;
Step2:编码,通过二进制编码的方式生成染色体,将各个个体的基因带入SVM,包括惩罚项参数和核函数参数,并对其进行训练和测试;
Step3 :适应度评价,根据适应度评价原则,计算每个个体的适应度的值;
Step4 :判断终止条件是否满足,若满足,则退出循环,不满足执行Step5 ;
Step5 :选择操作,从当前种群中选择适应度的值较高的个体,使它们进入下一次迭代过程;
Step6 :交叉操作,将种群内的个体随机搭配成对,对于每对个体以某一概率交换它们之间的部分染色体;
Step7 :变异操作:随机选择种群中的某些个体,对于这些个体以某一概率随机改变个体某个基因的值。然后返回Step2 继续下一次迭代。
3 实验结果与分析
3.1 复合特征提取
采集列车通过、行人通过以及人为盗挖产生的振动信号各100 组,振动信号特征提取方法采用时域- 小波域的复合特征提取方法。选取的时域特征为短时过双阈值率,选取的小波域特征为小波系数能量方差。
提取3 类振动信号的时域特征,使用矩形窗对信号进行加窗分帧处理,帧长选取32 ms,对每一帧信号进行降噪处理并进行6 层小波分解,计算这3 类振动信号100 组数据样本的短时过双阈值率平均值,计算结果,如表1 所示。
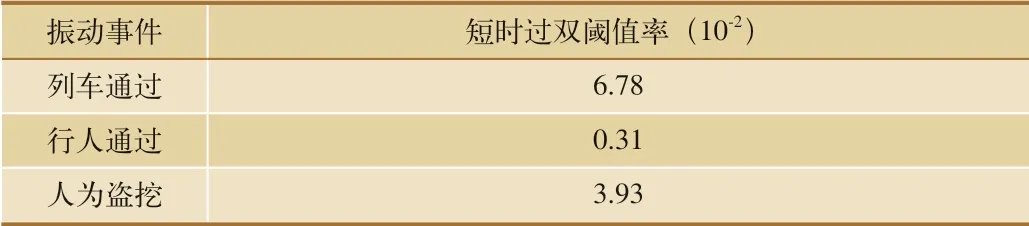
表1 3类振动事件的时域特征平均值
从表1 看出,列车通过所产生的振动信号振动幅度较大,因此短时过双阈值率的值较大;行人通过产生的振动信号振动幅度随时间逐渐衰弱,短时过双阈值率的值较小;人为盗挖所产生的振动信号类似间断的行人通过所产生的振动信号,短时过双阈值率的值高于行人通过产生的振动信号的值。
进一步地,提取3 类振动信号的小波域特征,对信号进行6 层小波分解,计算振动信号在7 个尺度[d1,d2,d3,d4,d5,d6,a6]下的小波系数能量方差占总能量方差的比值,得到的小波系数能量方差分布比,如图6 所示。
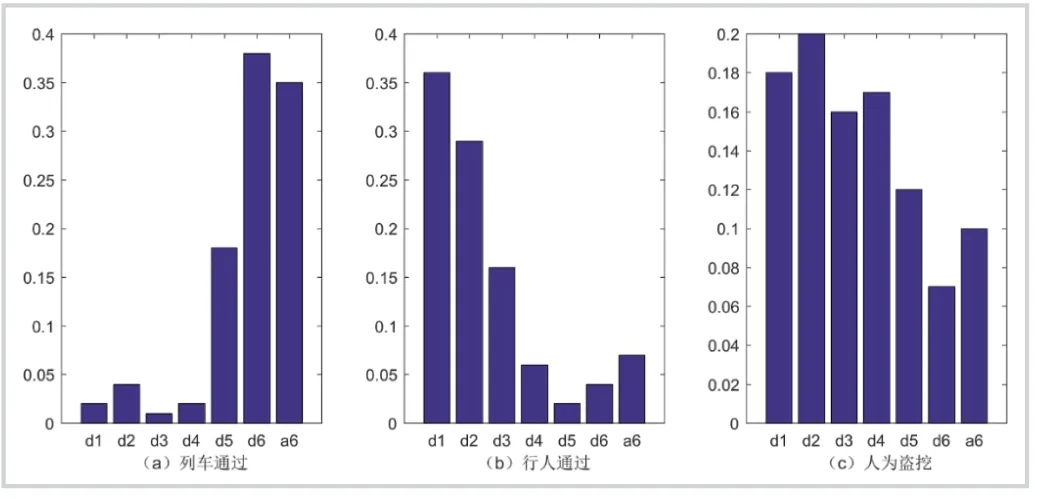
图 6 小波系数能量方差分布比
从图6 可以看出, 3 种振动事件的小波系数能量方差分布呈现明显差异,列车通过所产生振动信号的小波能量主要集中在高频,行人通过所产生振动信号的小波能量主要集中在低频,而人为盗挖所产生振动信号的小波能量分布相对较均匀。
3.2 SVM优化及分类
提取到3 类振动事件的时域特征和小波域特征之后,对这3 类振动信号分别选取50 组数据作为训练样本,剩余50 组数据作为测试样本。
针对基于时域特征、基于小波域特征以及基于时域- 小波域复合特征的3 种特征提取方法,建立对应的3 个基于决策树的多分类器,再对每个多分类器中的SVM 二分类器进行参数优化。
得出最佳的核函数参数和惩罚项参数之后,对DT-SVM 多分类模型进行训练。对于每类振动信号的100 组样本数据,随机选取50 组作为训练样本,提取训练样本的时域特征向量和小波域特征向量。分别选择时域特征、小波域特征以及时域- 小波域复合特征作为特征向量输入到基于决策树的SVM 分类器中,训练多分类器,最终得到3 种多分类器。将每类振动信号的剩余50 组数据作为测试样本,将其分别输入到得到的3 种多分类器中进行分类。这一过程循环进行10 次,计算平均分类正确率,如表2 所示。

表2 振动事件分类识别正确率
从表2 中可以看出,使用遗传算法优化SVM 的方法有效地提高了算法的分类正确率,且基于时域-小波域复合特征向量的特征提取方法相比于基于时域特征或基于小波域特征,对于每种振动信号的分类识别正确率均有很大的提高。这说明,单一的时域特征只能表征信号的振幅和持续时间信息,不能表现信号的频率信息,而小波域特征可以表现出信号在各个频带的分布特性。因此基于时域- 小波域复合特征的特征提取方法能够有效地识别振动信号的类型。
4 结束语
随着我国高速铁路的迅速发展,铁路通信光缆越来越多,可以充分利用各种监测技术,及时发现并阻止由于非法施工、人为盗挖等引起的铁路通信光缆破坏事件,以保障铁路系统的安全运营。
本文对目前主流的分布式光纤传感技术的工作原理进行了分析和总结,在此基础上提出了一种通过分布式光纤传感技术进行光缆盗挖告警的应用方案,并通过实验验证了其有效性。
猜你喜欢
传感技术学报(2022年7期)2022-10-19 03:04:20
今日农业(2022年15期)2022-09-20 06:54:16
科技风(2021年19期)2021-09-07 14:04:29
电子制作(2019年13期)2020-01-14 03:15:32
电子制作(2018年23期)2018-12-26 01:01:26
测控技术(2018年11期)2018-12-07 05:49:02
制造技术与机床(2017年10期)2017-11-28 05:20:43
系统工程与电子技术(2016年7期)2016-08-21 13:59:14
西北工业大学学报(2015年4期)2016-01-19 03:31:55
电测与仪表(2015年2期)2015-04-09 11:28:50