
阻尼可调半主动悬架八自由度仿真模型建立
2019-11-29 06:56李重重黄镇颖王振宇高玉
汽车实用技术 2019年22期
李重重,黄镇颖,王振宇,高玉
(南京信息职业技术学院汽车工程学院,江苏 南京 212023)
前言
悬架系统的主要功能是连接底盘系统和车身并缓和地面对车身的冲击力以及衰减车身的振动,从而提高乘坐的舒适性和车辆行驶时的平顺性。为提高上述两个性能,各国学者对于悬架系统中的两个关键参数刚度和阻尼进行大量研究,研究表明:刚度可调悬架系统或阻尼可调悬架系统可根据行驶工况自适应调节,能够有效提高乘坐舒适性和行驶平顺性,而阻尼可调悬架系统具有更好的工作适应性,提升效果更加明显,具有更加广阔的应用前景[1-3]。
目前,刚度可调悬架系统已日渐成熟,如带附加气室的空气悬架系统和互联空气悬架系统,上述两种悬架已在部分量产车上且运行效果较好。而对于阻尼可调悬架系统的研究大多还停留在1/4 车的模型建立、特性仿真阶段,而1/4 车模型并不能准确的反应整车振动、减振情况,对于提升车辆在不同使用条件下的乘坐舒适性和行驶平顺性有很大局限性[4-6]。
因此,本文在上述研究结果的基础上,进一步优化整车模型的准确的,根据可变阻尼悬架系统数学模型的基础上建立八自由度整车阻尼可调半主动悬架仿真模型,某款轿车相关参数如表1 所示。阻尼可调悬架系统整车八个自由度分别为:车辆质心处的垂向位移(包括位移、速度、加速度)、车内座椅的垂向位移(包括位移、速度、加速度)、车身左右侧倾角度、车身前后俯仰角度以及四个车轮处的垂向位移(包括位移、速度、加速度)[7-9]。
设置四个悬架与车身连接处的垂直位移为:SfL、SfR、SrL、SrR,则有:

式中:Scb为整车车身质心处垂向位移,单位为米;θ为车身的左右侧倾角度,单位为度;φ为车身前后俯仰角度,单位为度;lf前轴的水平距离、lr为后轴的水平距离,单位为米;d为前轮轮距(本文假设前后轮距相同),单位为米。
四个悬架的悬架力为:

式中:FfL、FrL、FfR、FrR为四个悬架和车身连接处的垂向作用力;kf、kr分别为前后悬架的刚度;Cf为前悬架减振器阻尼系数、Cr为后悬架减振器阻尼系数;SfL、SL、SR、SrR分别为四个车轮的垂向位移。
根据牛顿定律可得:
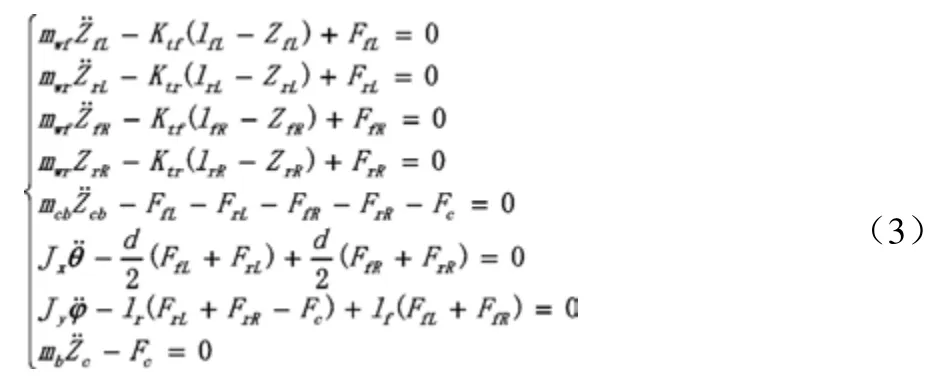
式中:lfL左前轮受到的路面冲击后的垂直位移,单位为米、lrL右前轮受到的路面冲击后的垂直位移,单位为米、lfL左后轮受到的路面冲击后的垂直位移,单位为米、lrR右后轮受到的路面冲击后的垂直位移,单位为米;mwf、mwr分别为前后轮胎质量,单位为千克;mcb为簧载质量,单位千克;Jx为整车质量绕质心纵向的转动惯量;Jy为整车质量绕其质心横向的转动惯量。

表1 整车相关参数
根据上述式(1)、式(2)和式(3)所建立的整车数学模型,利用式(3)中的方程组在MATLAB/Simulink 软件中建立阻尼可调半主动悬架整车八自由度仿真模型,如图1 所示。
本文以车辆质心处的垂向位移(包括位移、速度、加速度)、车内座椅的垂向位移(包括位移、速度、加速度)、车身左右侧倾角度、车身前后俯仰角度以及四个车轮处的垂向位移(包括位移、速度、加速度)这八个自由度为基础,建立阻尼可调半主动悬架八自由度仿真模型,为后续的系统优化和控制研究奠定理论模型基础。

图1 八自由度整车仿真模型
[1] 陈家瑞.汽车构造[M].第三版.北京:机械工业出版社,2009:199-225. Chen Jiarui. Automobile structure[M]3rd ed. Beijing: China Mach -ine Press, 2009:199-225(in Chinese).
[2] 姚嘉伶,蔡伟义,陈宁.汽车半主动悬架系统发展状况[J].汽车工程,2006,28(03):276-280.
[3] LauwerysC, Swevers J, S as P.Model Free ControlDesign for aSemi- active Suspension of a Passenger Car[C].Proceedings of ISMA, 2004:75-86.
[4] 琚龙玉,李仲兴,江洪,等.附加气室容积可调空气悬架多目标参数匹配[J].汽车技术,2014,(06):29-33.
[5] ArakiY. Previewcontrolo factivesuspensionusing disturbancein forma -tionof frontwheel[J].TransactionsoftheJapanSocietyof Mechanical Engineers,1994,60(578):3405-3408.
[6] 李重重.附加气室容积可调空气悬架刚度和阻尼控制[D].江苏大学,2016.
[7] Wei Liu,RuochenWang,RenkaiDing,XiangpengMeng,Lin Yang. On -line estimation of road profile in semi-active suspension based on unsprung mass acceleration[J]. Mechanical Systems and Signal Processing,2020,135.
[8] TianheJin,ZhimingLiu,ShuaishuaiSun,ZunsongRen,LeiDeng, BoYang, Matthew Daniel Christie,Weihua Li. Development and evaluation of a versatile semi-active suspension system for high-speed railway vehicles[J]. Mechanical Systems and Signal Processing,2020,135.
[9] D. H. Shi,L.Chen,R. C. Wang,C. C. Yuan,Y. L. Liu. Research on Energy-Regenerative Performance of Suspension System with Semi -active Control[J].Journal of Vibration Engineering & Technologies, 2019,7(5).
[10] 杨军杰.基于T-S 模糊模型的主动悬架系统容错控制研究[D].西安理工大学,2019.
猜你喜欢
材料研究与应用(2022年4期)2022-09-01
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年16期)2022-08-31
汽车实用技术(2022年14期)2022-07-30
北京航空航天大学学报(2021年4期)2021-11-24
时代汽车(2021年1期)2021-03-03
电子技术与软件工程(2019年8期)2019-07-16
中学生数理化·教与学(2019年5期)2019-06-06
建筑工程技术与设计(2015年29期)2015-10-21
大众科学(2015年1期)2015-09-10
