井下车辆智能管理系统的应用
2019-11-27 06:29:42牛高
有色设备 2019年5期
牛 高
(中国冶金科工股份有限公司, 北京 100028)
1 需求
1.1 红绿灯及智能控制
井下计划安装红绿灯12处、共计24组(每组400×800 mm),其中井口1组、井下有3处每处需安装3组、有7处每处安装2组。
该系统基于精确定位系统,实现车辆红绿灯的智能控制。当车辆到达路口,系统通过软件采集的车辆卡片与路口控制器的信息,来计算两者之间的距离,从而判断哪辆车先到达,实现先到先行,提高路口车辆通行效率。
1.2 声光报警音箱需求
系统总共设置6处报警箱,实现副井上口500 m巷道内只要有人,就开始播报“正在行人、不准行车”,并闭锁车辆闸门;当有车辆进入副井上口500 m巷道时,闭锁行人闸门,并播报“正在行车、不准行人”;当人员与车辆位置一致时,说明人员在乘车。
行车时,各路口报警箱实现播报“正在行车、不准行人”,如有人闯入,则播报“你已闯入禁止区域,请退回安全区”。
1.3 跑车装置需求
斜井总共安装4组跑车防护装置,当定位系统监测到车辆失速时,发出跑车装置动作指令,对车辆进行捕捉,降低井下车辆人员事故的发生。
2 系统设计
2.1 红绿灯系统及智能控制
2.1.1 红绿灯系统概述
系统通过井下LED显示屏实现井下红绿灯系统功能,同时结合语音声光报警器等智能设备可实现信息资源的调度管理,具有逃生救援引导、常规信息发布、安全警示教育、环境安全信息实时显示、预警预报、调度广播等功能,可实现“指定时间,指定地点,指定模式发布指定内容”的功能。
方案示意图如图1所示。
2.1.2 红绿灯系统组成
系统主要由系统软件,数据服务器,应急信息发布设备(包括地面智能信息发布终端,井下应急LED信息牌、井下应急LED指示牌、井下应急声光报警器等)组成。
2.1.2.1 矿用LED显示单元
该设备能接收总线命令,根据用户选择的显示方式循环显示用户编辑好的文字字符,能作为信号指示器或信息发布使用,可以通过遥控器进行有关设置,具有稳定可靠、使用方便等特点。

图1 方案示意图
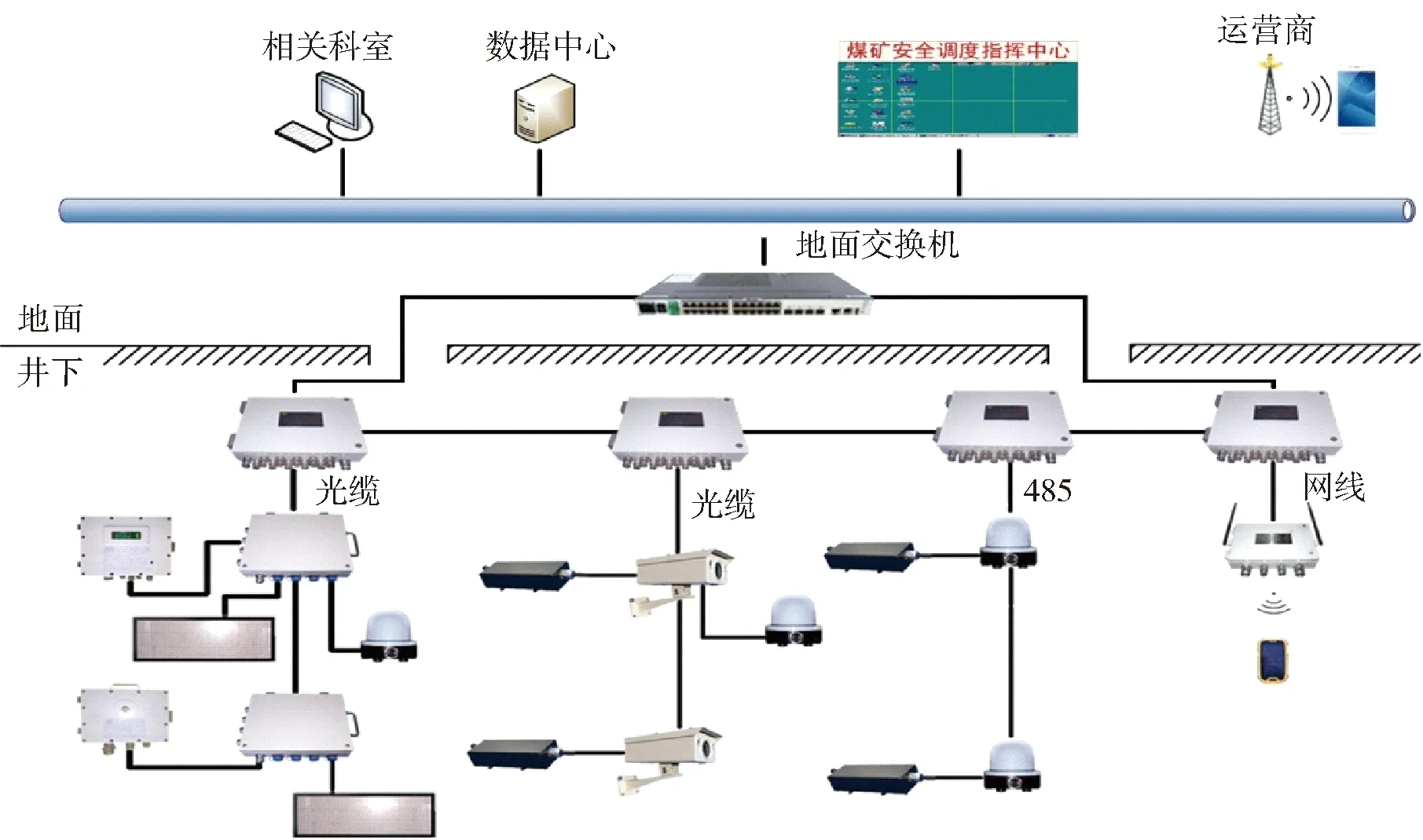
图2 系统组成
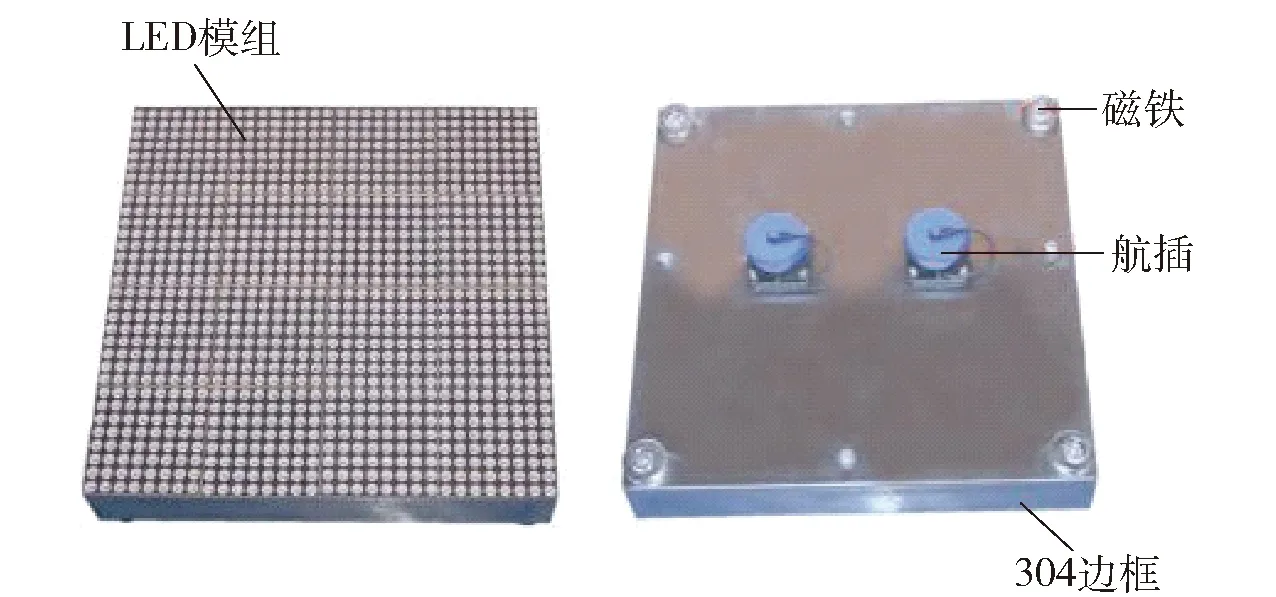
图3 矿用LED显示单元实物
防爆型式:矿用本质安全型,标志为“Ex ib I Mb”
规格:点阵32×32
工作电压:DC3.3 V
工作电流:≤500 mA
接口:1个输入显示接口,1个输出显示接口
外形尺寸:194 mm×194 mm×53 mm
重量:0.85 kg
2.1.2.2 矿用电源
电源安装在巷道基站附近,独立给基站供电。
矿用浇封兼本安型直流稳压电源采用高性能集成电路,输出稳定的直流电压,电源输出有过压、过流、短路等保护,并采用指示灯实时指示出输入、输出、电池状态等,备用电池采用体积小、容量大的磷酸铁锂电池,断掉交流电后仍可持续输出电压时间大于2 h。
技术参数如下文所示:
(1)本安输出性能
本安输出性能见表1所示。
(2)工作电压
额定工作电压:220 VAC
电源箱额定供电电压波动范围:90~260 VAC
电源箱额定输入功率:≤50 W
电源频率:48~52 Hz
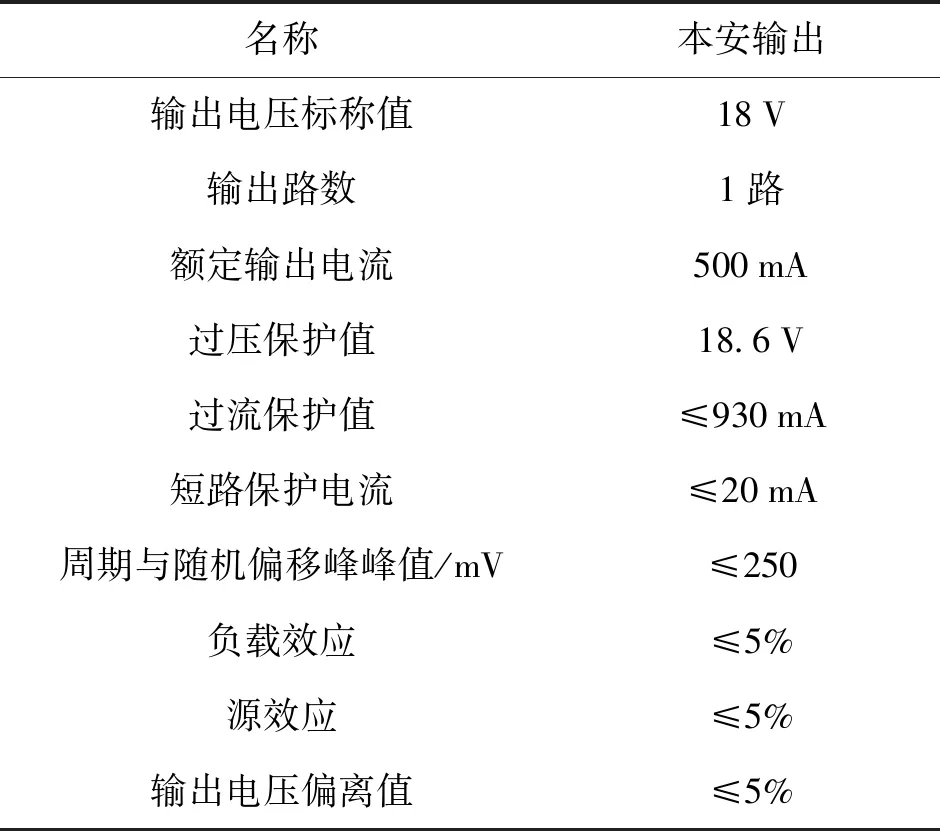
表1 本安输出性能表
电源电压失真:总的谐波分量应≤10%
(3)备用电源功能
备用电源为IFR32750- 5Ah型磷酸铁锂,电池采用3节串联,容量为5 AH,采取浮充充电方式。
转换时间:≤1 s
充电电流:≤500 mA
充电截止电压:≤10.5 V
放电终止电压:≤7.6 V
最高充电电压:10.8 V
备用电池工作时间:≥2 h
2.1.3 红绿灯智能控制
2.1.3.1 实现原理
基于精确定位的红绿灯智能控制框图如图4所示。
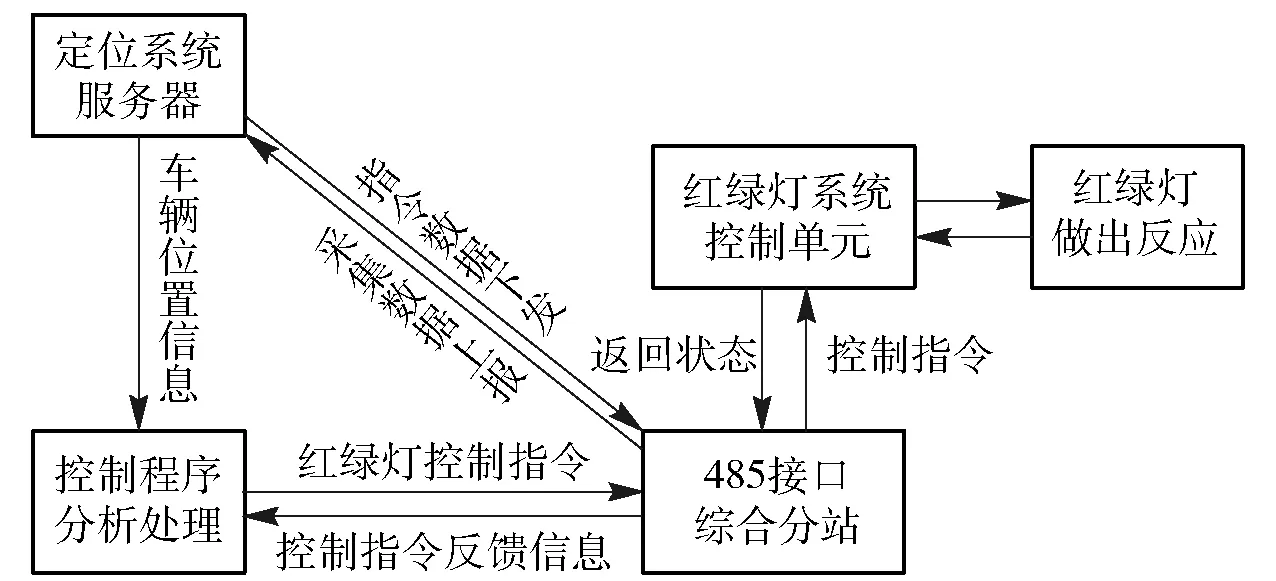
图4 红绿灯智能控制原理图
具体实现:定位将车辆的具体位置发送给控制程序,控制程序接收到车辆位置信息后,计算出与路口的距离,并与其它车辆进行比对,对那一辆车先到达路口进行预测,根据预测结果,提前向红绿灯系统控制单元发送控制指令。
鉴于车辆的速度、定位误差及反应时间,建议再车辆距离路口100米左右时发出红绿灯控制指令。
2.1.3.2 硬件介绍
数据传输模块技术参数
工作电压:DC18V
输入接口:RS485,2路
输出接口:RJ45,1路
输出标准:10Base-T/100Base-T
距离:RS485端1 200 m
2.2 声光报警器及智能控制
2.2.1 概述
声光报警器用于井下声光及语音播报,报警器不仅可以实现固定语音播报,如井下“行人不行车、行车不行人”语音播报;而且可以灵活设置播报内容。
2.2.2 硬件介绍
声光报警器用于井下声光及语音播报,报警器不仅可以实现固定语音播报,如井下“行人不行车、行车不行人”语音。
矿用声光报警器: 采用语音合成技术,报警语音内容灵活可变,能接收上位机下发的指令,文稿广播内容自动语音广播,播报多样化、个性化的大容量内存,可存储内置语音信息;采用注塑成型工艺,外观精致、结构紧固,安装方便,可适合于吊挂或吸附使用;具备红、绿、黄三色光报警,有闪烁、旋转、跳跃等多种光展示形式;具有2路开关量信号输入和1路RS485通讯接口,可控制声光报警。

图5 矿用声光报警器实物
防爆型式:矿用本质安全型,标志为“Ex ib I Mb”
工作电压:DC18 V
工作电流:≤200 mA
供电电压范围:9 V~24 V
接口:2路开关量输入信号,1路RS485通讯信号
光信号可见距离:不小于20 m(黑暗中)
声信号音响响度:不小于85 dB
外形尺寸:150 mm×166 mm×248.5 mm
重量:0.5 kg
2.2.3 智能控制
基于精确定位的声光报警箱智能控制框图如图6所示。
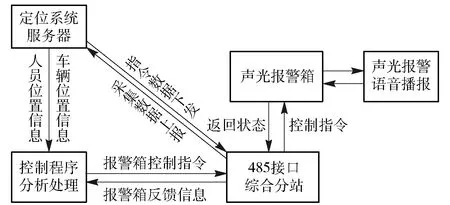
图6 声光报警箱智能控制框图
具体实现:定位系统将人员及车辆的具体位置发送给控制程序,控制程序接收到人员、车辆位置信息后,分析出当前巷道人员及车辆的分布情况,当巷道内有人时,向声光报警音箱发出“正在行人、不准行车”;反之在发出“正在行车、不准行人”;同时对非常闯入情况进行分析并发出声光报警提示。
声光报警箱采用485接口,通过综合分站接入,分析控制程序可向声光报警箱发出指令,并控制声光报警箱播放哪种语音(或直接向声光报警器发送文字信息进行播报)。
2.3 跑车装置及智能控制
2.3.1 跑车装置概述
矿山斜井运输巷道具有一定的坡度,无轨胶轮车下行如出现车辆失控、超速、刹车失灵等突发情况,极容易造成重大安全事故,本套系统防护装置具有控制、实时显示、测速、阻挡失控车辆等功能,保证运输安全。
矿用无轨胶轮车跑车防护装置主要用于煤矿副斜井内,具有监控胶轮车上下运行状态及井口井底车场车辆等待情况,并通过圣光报警装置提醒上下行车辆及副斜井施工或工作人员注意避让行驶车辆。通过雷达测速监控车辆行驶时速,如超过规定时速,自动启动倒车硐室内阻车装置,实现被动阻车,车辆失控时,驾驶人员可通过按动车载急停按钮实现主动阻挡超速失控车辆,有效的防止发生安全事故。
(1)声光报警
当胶轮车由井口下行中,车上的发射器发射无线“运行信号”,井底接收控制器收到信号输出开关,井底报警器发出声光信号;当胶轮车由井底上行中,同理井口报警器发出声光信号。提醒上下行车辆相互避让;
(2)图像显示
摄像仪摄取的图像,处理后经电光转换,光纤传输,光电转换输入显示器的液晶屏,实现井口、井底车场车辆实时监控显示。
(3)测速
采用某公司的车辆定位服务,给出超速信号,实现阻车器动作阻车。
(4)阻车
①当下行胶轮车失控或者超速(大于雷达测速器设定值),雷达捕捉的信号输入相关接收控制器,控制器输出开关,启动电动执行器动作,阻车器移动至挡车位实现阻挡车辆行进。
②胶轮车司机按下车上发射器控制按钮,连续发射无线“阻车信号”,相关接收控制器收到信号,输出开关,执行器动作,实现阻挡车辆行进。
2.3.2 跑车装置实施方案
经测量,从井口至井底平巷总长度为2 500 m,根据矿方场地环境,我方给出如下安装施工方案;
(1)阻车器安装在倒车硐室内,倒车硐室分别在559、854、1 154、1 450、1 750 m处,选取其中4个。
副斜井倾斜角坡度6°,总长度为2 500 m,巷道宽度5 m,高度4.1 m。
(2)副斜井内有风压管道,此次方案采取气动执行器作为执行机构,主电源为交流127 V。
(3)井口井底分别安装声光报警器,车辆上行时,井口报警器绿灯转红灯,语音提示:“正在上行,不准下行”,反之同理,车辆离开井口或井底区域,报警自动解除,显示为绿色灯光。
(4)井口井底安装摄像仪,实时传输视频信号,便于主控室值班人员实时监控车场。
(5)测速采用车辆定位系统。车辆定位系统基于ZigBee、WIFI技术,整个系统包括定位服务器、车辆定位卡、综合基站,利用井下网络传输系统进行组网,系统采用有线、无线等多种组网方式,即控制了成本,又提供安装实施的灵活性。
跑车装置连接原理如图7所示:
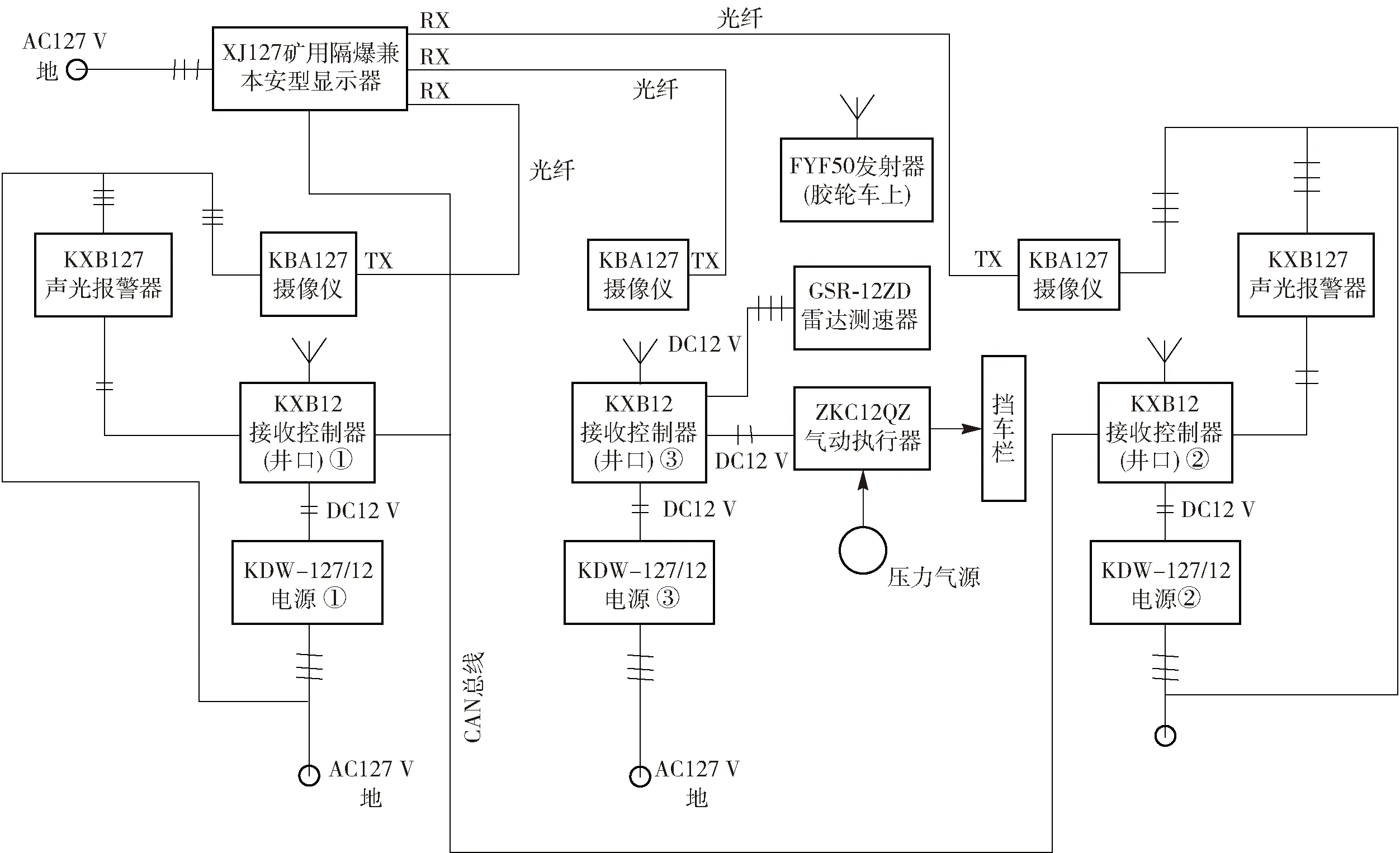
图7 装置连接图
2.3.3 智能控制
基于精确定位的跑车防护装置智能控制框图如图8所示。
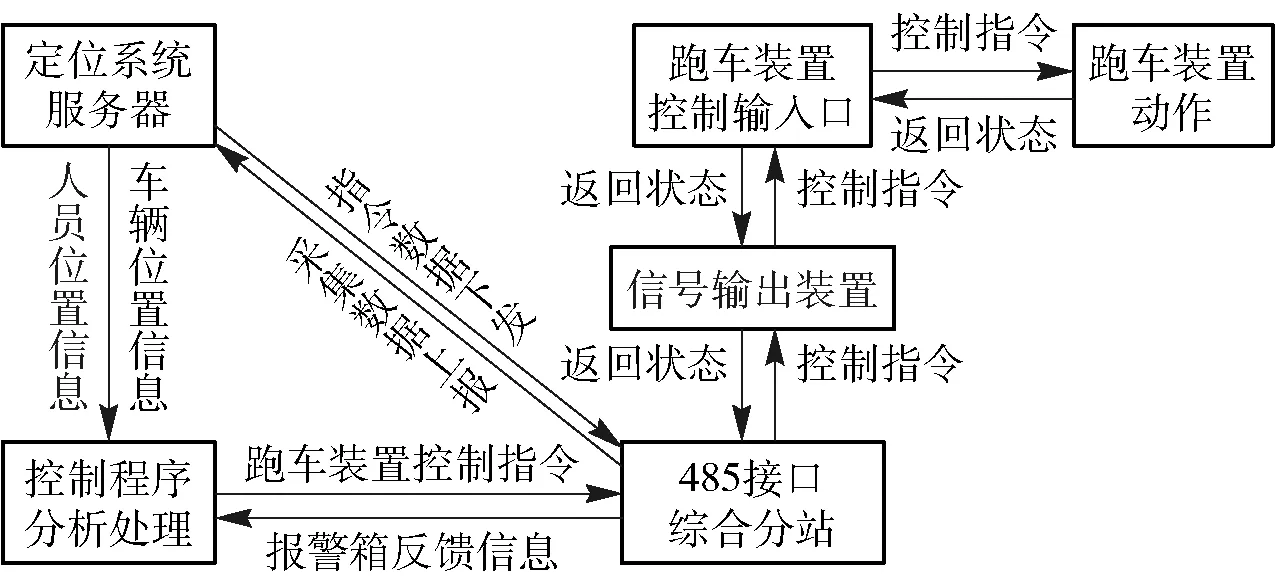
图8 跑车防护装置智能控制框图
定位系统将车辆速度发送给控制程序,控制程序接收到速度数据进行分析,当车速超过设置的值时,分析程序向跑车装置发送动作指令。
跑车装置动作指令原由激光雷达输出的模拟信号控制(高低电平信号),因此需综合分站需通过一个信号输出装置(如断电器)向跑车装置输出信号,使其动作。
2.3.4 硬件介绍
2.3.4.1 综合分站监测模块(接断电器)技术参数
工作电压:DC18V
传输方式:CAN
输入接口:CAN,5路
输出接口:RJ45,1路
输出标准:10Base-T/100Base-T
2.3.4.2 信号输出装置技术参数
工作电压:DC18V
传输方式:CAN
输出接口:CAN,1路
输出接口:高低电平信号(待定)
2.4 门禁道闸系统
2.4.1 系统概述
门禁道闸系统实现车辆出入井的控制,井口考勤基站对车卡进行识别,并实现向门禁控制器发送指令自动开闸;如系统判断井下巷道有人时,可控制不开闸,并向井口声光报警器发送播报“井下有行人、禁止进入”的指令;行人通过后系统向门禁控制器发送开闸指令,放行车辆。
2.4.2 硬件介绍
2.4.2.1 声光报警器
介绍详见2.2.2。
2.4.2.2 生物考勤基站
(1)设备描述
基站安装在井口,用于自动识别井口定位终端,并上报于定位系统的服务器上,其具有大规模可靠识别定位卡的特点,单站并发识别数量可达200张以上,可稳定识别最大位移速度60 km/h的应目标。需配备板状天线,提高识别率。
(2)设备特点:识别卡的状态,包含未带卡、故障卡、低电卡;识别多张卡;使用距离:500~2 000 mm(具体可通过软件配置)。
(3)技术参数
生物考勤基站的技术参数如表2所示。
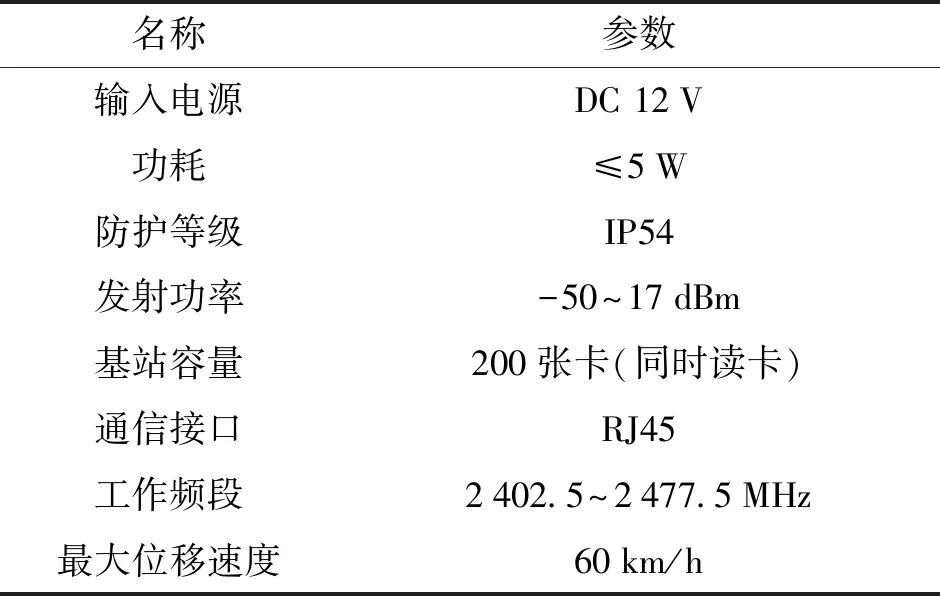
表2 设备参数表
2.4.2.3 门禁控制器
(1)基本功能
采用高速32位400 MHz高速CPU,配合32 MBits RAM,256 MBits Flash;嵌入式linux操作系统;控制四门单向或双门双向进出;支持最多30 000个持卡人及100 000条脱机事件记录;可灵活设置多个时间组、门状态、节假日和不同用户的各种开门权限;支持多种Weigand卡格式,支持密码键盘,兼容各种卡片。

图9 门禁控制器实物
(2)技术参数
门禁控制器的技术参数如表3所示。
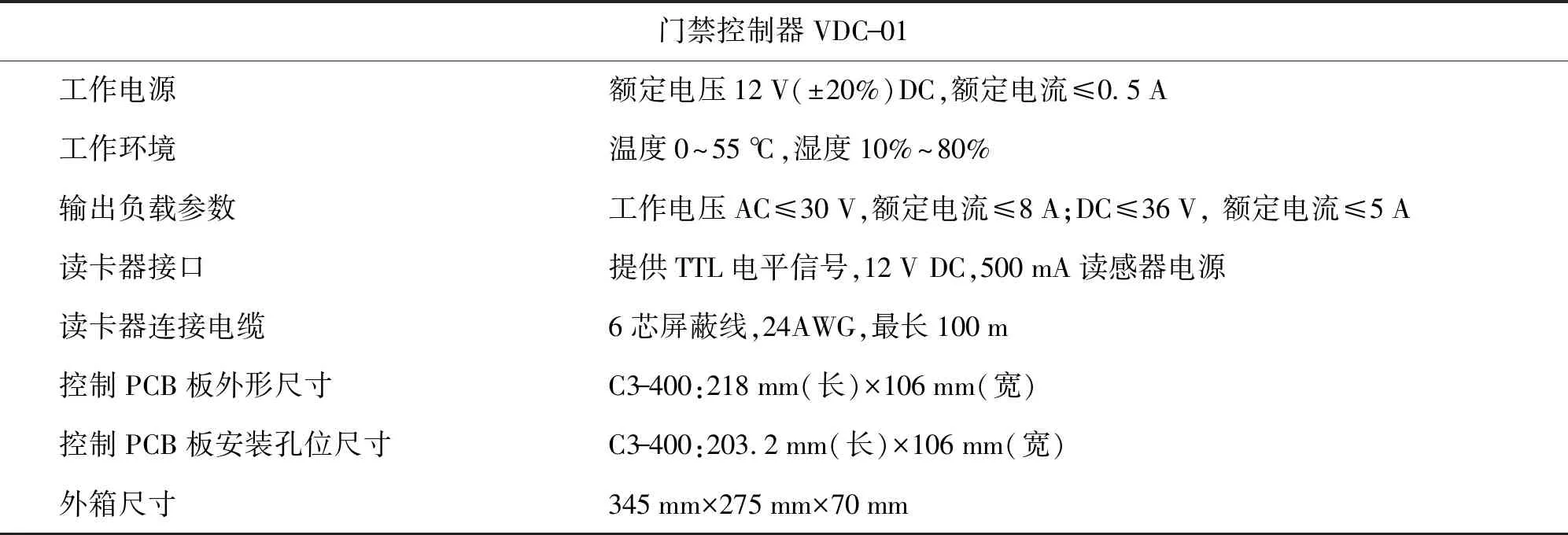
表3 门禁控制器技术参数表
2.4.2.4 道闸
(1)特点
支持手动制动起落杆;电机风扇冷却装置;机械防砸功能,当闸杆受阻,自动起杆;兼容其他设备RS485通信模块,可接收来自不同终端的开关信号。
(2)技术参数
道闸的技术参数如表4所示。
3 结语
本文阐述了为实现矿山井下工程的运输管理智能化,所采用的红绿灯系统和跑车防护系统,该系统基于定位系统,实现定位、红绿灯、跑车防护三个系统的智能联动,进一步保障井下交通安全,提高生产效率。

图10 道闸实物
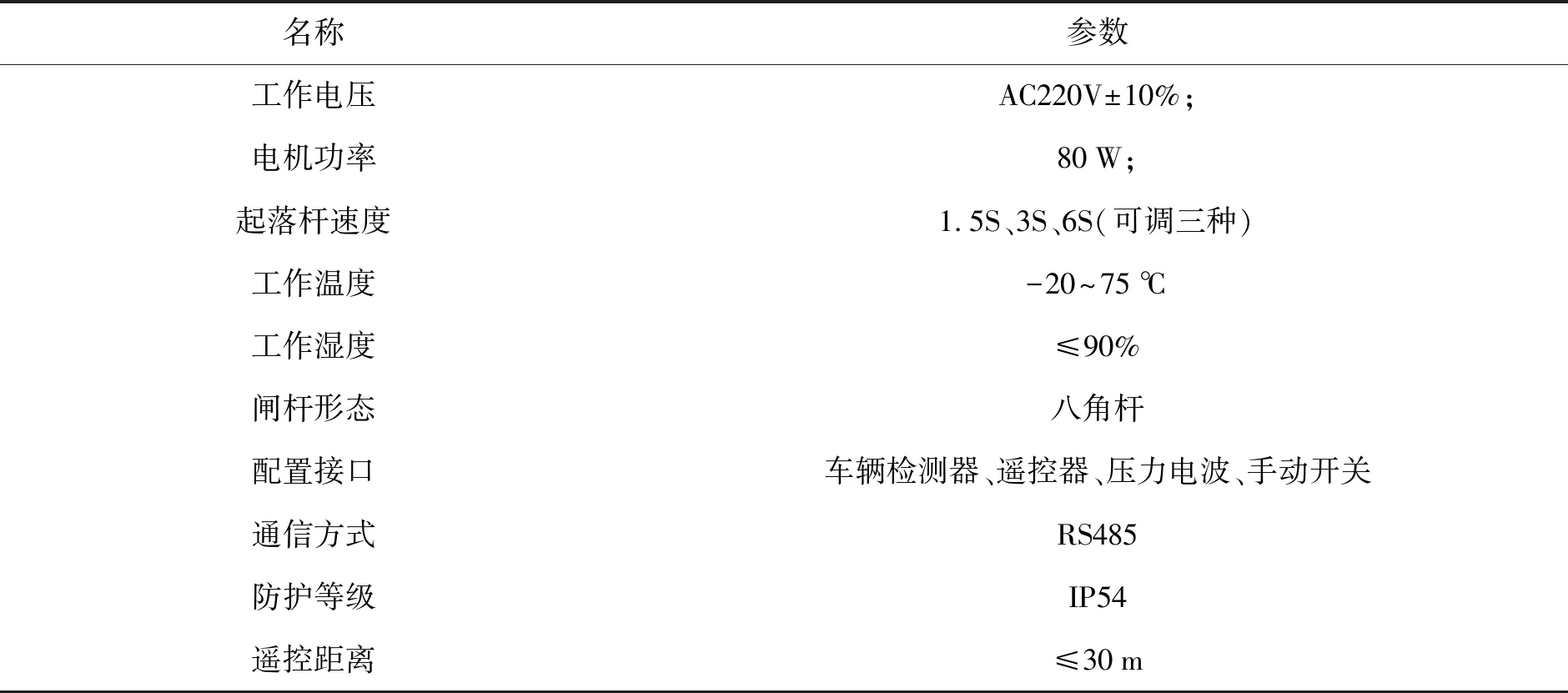
名称参数工作电压AC220V±10%;电机功率80W;起落杆速度1.5S、3S、6S(可调三种)工作温度-20~75℃工作湿度≤90%闸杆形态八角杆配置接口车辆检测器、遥控器、压力电波、手动开关通信方式RS485防护等级IP54遥控距离≤30m
本次研究成果具有技术先进性,良好的经济性,而且系统模块化的框架能很好适应各类客户的信息化矿山建设。具有很好的矿山行业推广价值。
猜你喜欢
消费电子(2022年7期)2022-10-31 06:17:30
中国交通信息化(2022年3期)2022-06-01 06:09:38
轿车情报(2022年2期)2022-04-12 00:00:00
轿车情报(2022年4期)2022-04-12 00:00:00
通信电源技术(2020年11期)2020-09-07 09:40:26
快乐语文(2018年25期)2018-10-24 05:38:42
小学生导刊(2018年13期)2018-06-29 03:48:58
小天使·一年级语数英综合(2018年6期)2018-06-22 10:25:54
电子技术与软件工程(2016年23期)2017-03-06 20:19:04
越玩越野(2016年2期)2016-12-26 04:02:14