基于AIS的遥控艇避碰决策算法
2019-11-27 01:16:44史万莉
自动化与信息工程 2019年5期
史万莉
基于AIS的遥控艇避碰决策算法
史万莉
(中国船舶重工集团有限公司第七一○研究所)
遥控艇和遥控母船通信中断后,基于安全策略,遥控艇自动向母船靠近。为避免靠近过程中遥控艇碰撞周围其他船舶,设计基于AIS的遥控艇避碰决策算法,并对遥控艇左舷、右舷和正前方交叉相遇3种情况进行计算机仿真。仿真结果表明:该算法具有较好的避碰效果,为后续相关研究提供参考。
AIS;遥控艇;避碰决策算法
0 引言
船舶避碰决策是现代航海领域技术中重要的研究课题,它在预防船舶碰撞事故发生、保证船舶安全航行等方面发挥十分重要的作用[1-2]。但其无法从根本上避免船舶间的不协调行动,主要原因是会遇船舶间缺乏动态信息交流(经纬度、航速和航向等)。船载自动识别系统(shipborne automatic identification system, AIS)通信设备可以解决上述问题。
本文设计的基于AIS的遥控艇避碰决策算法,在遥控艇和遥控母船通信中断后,遥控艇启动应急处理机制,自动避碰其他会遇船舶并向遥控母船靠近。
1 系统相关理论
1.1 遥控艇运动模型
遥控艇和其他船舶的速度在,轴上的分量为

其他船舶相对速度在,轴上分量可表示为


遥控艇与其他船舶的最近会遇距离[4](distance of close point of approaching, DCPA)为

1.2 两船安全会遇距离模型

在避碰决策过程中,系统根据遥控艇AIS提供的信息实时计算两船的安全会遇距离。当时,遥控艇避碰决策系统无需避碰操作,只对目标来船进行监测;当时,遥控艇避碰决策系统进行避碰操作。
2 系统设计
遥控艇避碰决策算法的流程如图1所示。
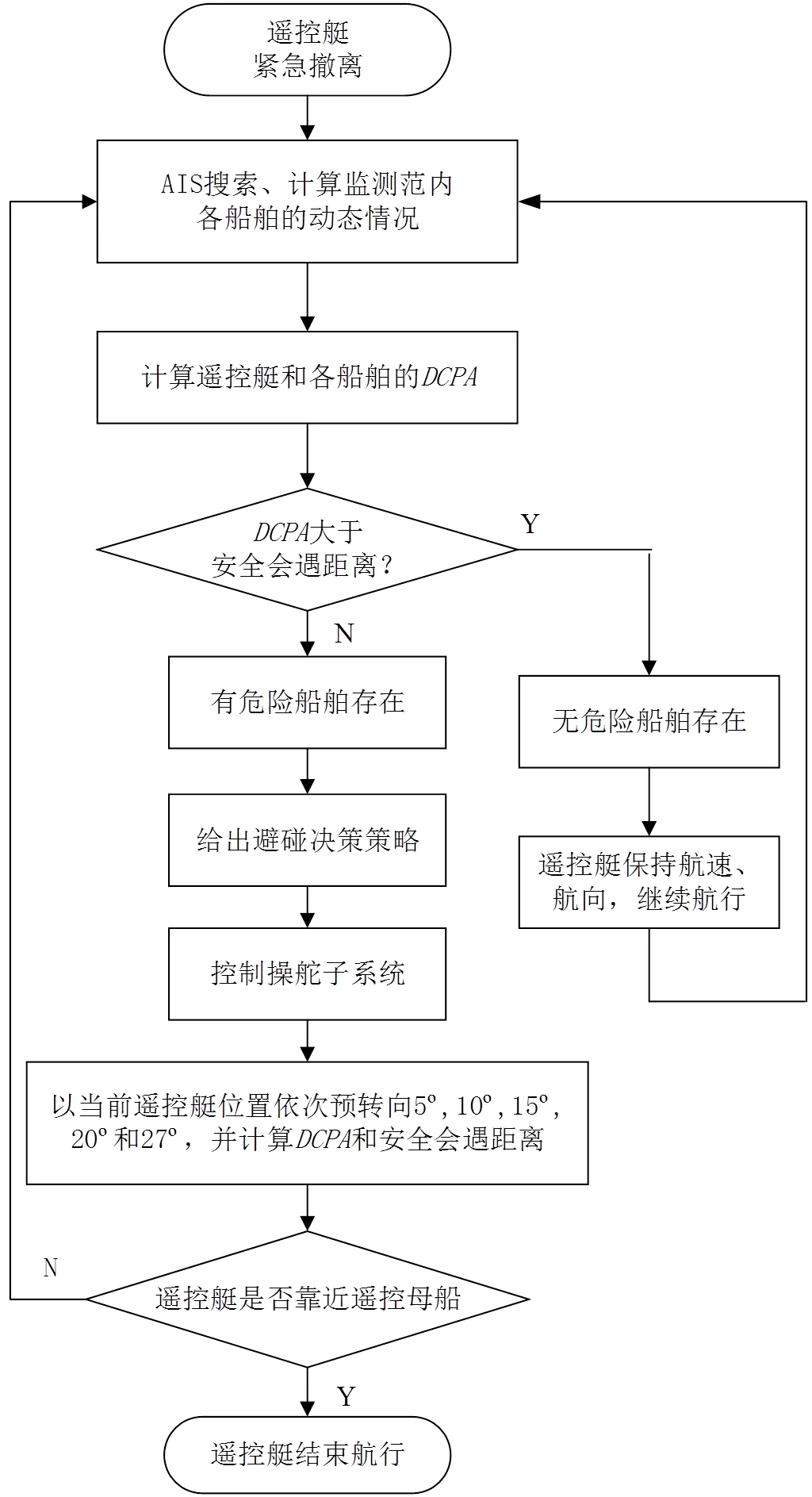
图1 遥控艇避碰决策系统的推理流程图
1)计算监测范围内各船舶的主要相关参数
AIS为遥控艇提供监测范围内船舶的航向、航速、经纬度和DCPA等信息。遥控艇避碰决策算法计算参数,并在避碰决策模块统一显示,为遥控艇紧急撤离自动避碰操作时提供决策。
2)建立搜索区域
3)判定避碰操作
3 系统仿真演示
遥控艇会遇可分为对遇、交叉相遇和追越3种情况,其中追越和对遇本质相同,本文仅对相遇进行仿真分析。
本文以Visual Studio 2005作为开发平台对基于AIS的遥控艇避碰决策算法进行仿真,演示遥控艇和目标船左舷交叉相遇、右舷交叉相遇、正前方交叉相遇3种情形。
1)遥控艇左弦避碰目标船
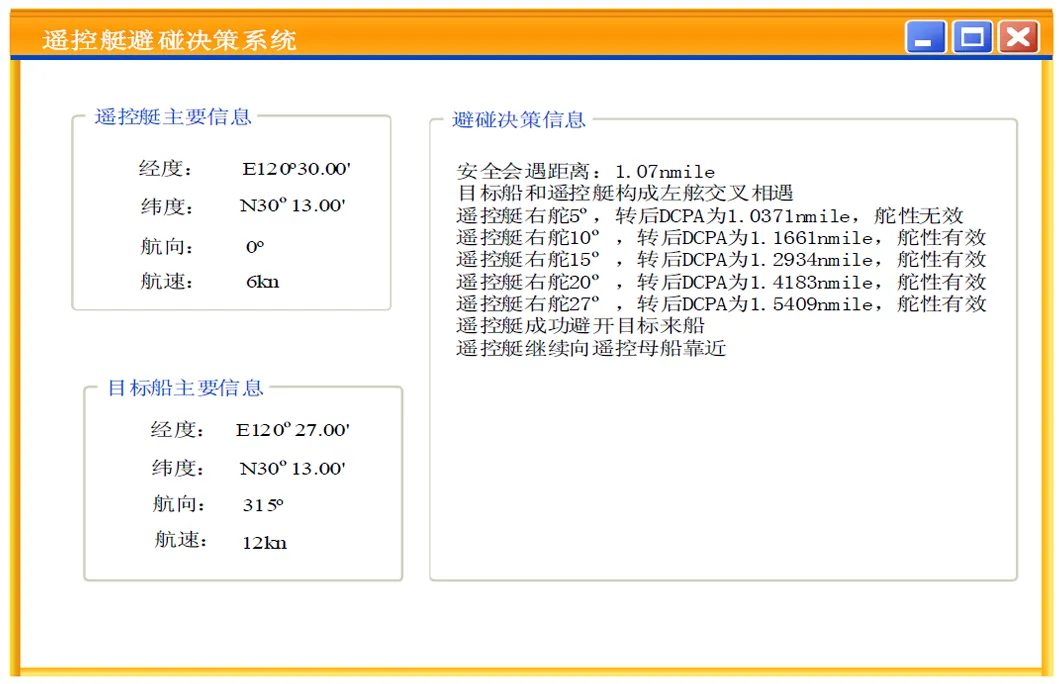
图2 左舷交叉相遇,遥控艇避碰决策系统演示图
2)遥控艇右舷避碰目标船
设目标船航速12 kn,航向45°,东经120°33.00′,北纬30°13.00′;遥控艇航速6 kn,航向0°,东经120°30.00′,北纬30°13.00′,系统仿真演示如图3所示。基于AIS的遥控艇避碰决策算法判定遥控艇和目标船构成右舷交叉相遇。根据AIS提供的信息计算S为1.07 nmile,遥控艇依据避碰决策系统左舵10°,转向后两船的为1.1661 nmile,大于S=1.07 nmile,遥控艇成功避开目标来船的碰撞。
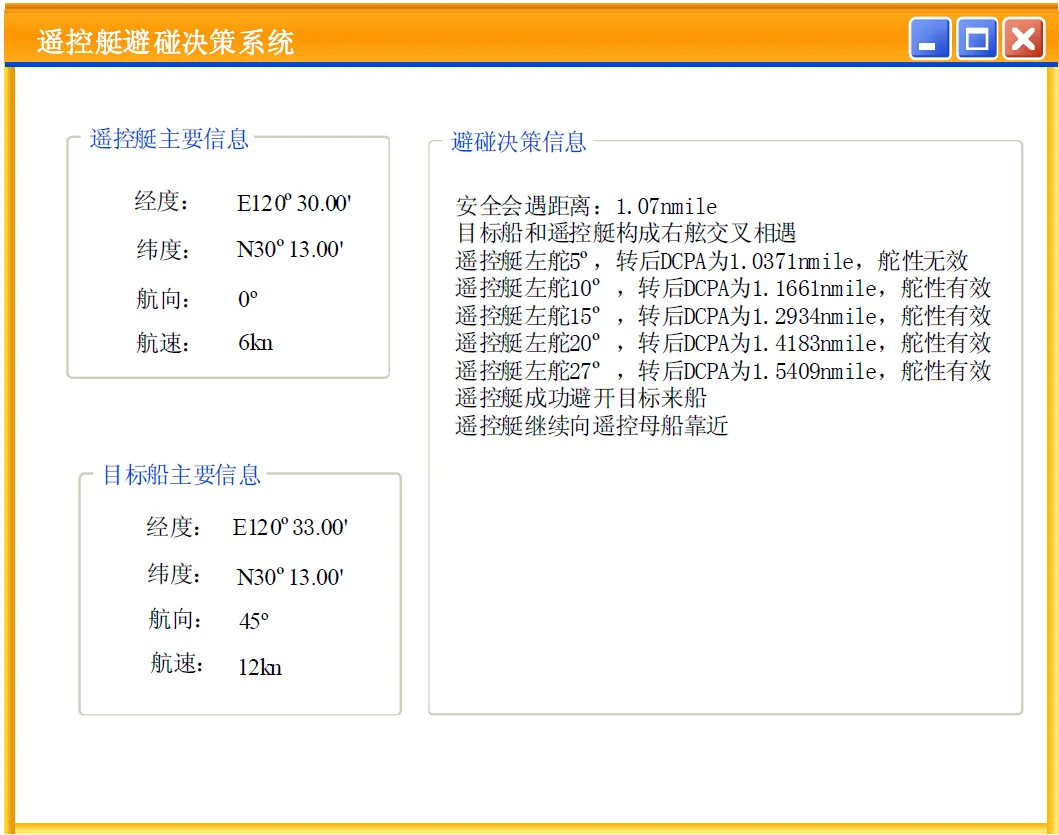
图3 右舷交叉相遇,遥控艇避碰决策系统演示图
3)遥控艇正前方避碰目标船
设目标船航速12 kn,航向0°,东经120°30.00′,北纬30°13.00′;遥控艇航速6 kn,航向0°,东经120°30.00′,北纬30°13.00′,系统仿真演示如图4所示。基于AIS的遥控艇避碰决策算法判定遥控艇和目标船构成正前方交叉相遇,根据AIS提供的信息计算S为1.07 nmile,遥控艇依据避碰决策系统右舵10°,转向后两船为1.1661 nmile,大于S=1.07 nmile,遥控艇成功避开目标来船的碰撞。
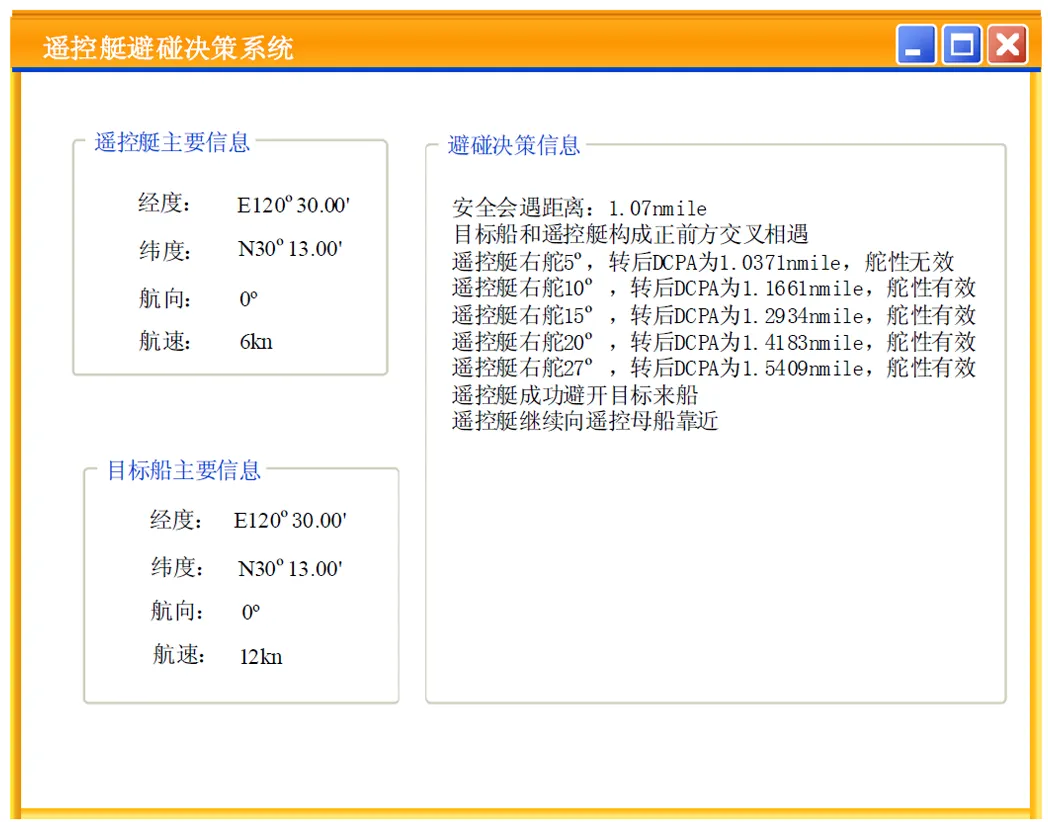
图4 正前方交叉相遇,遥控艇避碰决策系统演示图
4 结语
本文通过对遥控艇运动模型、两船安全会遇距离模型以及遥控艇有关避碰参数计算方法的研究,并以AIS作为主要的避碰信息源,设计遥控艇避碰决策算法。对目标来船与遥控艇会遇的3种情况进行计算机仿真。仿真结果表明,该算法具有较好的避碰效果,可为后续相关研究提供参考。
[1] 朱金发,孙文力,汤华.船载自动识别系统手册[M].北京:人民交通出版社,2005.
[2] 王平利.船舶自动识别系统应用关键技术研究[D].武汉:武汉理工大学,2007.
[3] 刘科.基于船舶避碰的专家系统的研究[D].镇江:江苏科技大学,2008.
[4] 赵月林,刘野,谢洪彬.船舶值班与避碰[M].北京:人民交通出版社,2001.
[5] 赵劲松,王逢辰.船舶避碰学原理[M].大连:大连海事大学出版社,1999.
Decision Algorithm of Collision Avoidance for Remote Control Boat Based on AIS
Shi Wanli
(No.710 R&D Institute, CSIC)
After the communication between the remote control boat and the remote control mother ship is interrupted, based on some kind of security, the remote control boat will automatically approach the mother ship .In the process of approaching, how will the remote control boat avoid collision with other ships around. In this paper, a remote control boat collision avoidance decision algorithm based on AIS is designed, the computer simulation of the left chord, right chord and forward cross encounter of the remote control boat is carried out, simulation results show that the algorithm has a good effect of collision avoidance, and provides a reference for the subsequent research on relevant aspects.
AIS; Remote Control Boat; Collision Avoidance Decision Algorithm
史万莉,女,1983年生,硕士研究生,工程师,主要研究方向:信号与信息处理,E-mail:15271538135@139.com
猜你喜欢
青少年科技博览(中学版)(2023年1期)2023-03-17 00:44:42
集美大学学报(自然科学版)(2022年4期)2022-09-04 03:13:02
新世纪智能(高一语文)(2021年3期)2021-07-16 08:30:16
中国航海(2021年1期)2021-03-10 13:31:32
民用飞机设计与研究(2019年4期)2019-05-21 07:21:26
语文世界(小学版)(2019年2期)2019-02-24 08:24:34
上海海事大学学报(2018年1期)2018-04-30 05:15:32
电子制作(2017年24期)2017-02-02 07:14:16
法大研究生(2015年2期)2015-02-27 10:13:55
中国航海(2014年3期)2014-11-28 11:17:08