
一种基于INS/GPS/CNS 的全信息导航滤波算法
2019-11-25 14:25尹洪亮于东康
舰船科学技术 2019年10期
尹洪亮,张 嵘,郝 强,于东康
(1.清华大学精密仪器系,北京 100084;2.中国舰船研究院,北京 100192;3.哈尔滨工业大学仪器科学与工程学院,哈尔滨 150001)
0 引 言
由于惯性导航系统(Inertal Navigation System,INS)与全球定位系统(Global Positioning System,GPS)组合可以提供较高精度的速度、位置信息,所以INS/GPS 组合系统被广泛应用在船舶、飞机、导弹等领域。但因INS/GPS 组合系统量测信息仅包括位置和速度信息,缺少姿态信息观测量,导致系统的可观测性较差,容易造成系统在长时间导航应用中精度不高,甚至姿态信息发散的问题[1-3]。
天文导航系统(Celestial Navigation System,CNS)采用星体敏感器测量天体方位信息,在经过解算后输出载体姿态信息,其特点是姿态测量精度高、测量误差误差不随时间积累、系统可靠性高,是一种新型的高精度姿态测量系统[4-6]。
为增加INS/GPS 组合系统的量测信息,提高系统导航精度,改善系统航向误差发散的问题,将CNS 与传统INS/GPS 系统组合是目前的研究热点。张科设计了基于联邦滤波的INS/GPS/CNS 组合导航算法,但由于其采用的是线性卡尔曼滤波框架,不能很好适应INS/GPS/CNS 这类典型非线性系统,造成滤波结果精度较低;吴坤峰考虑到CNS 可能存在输出不连续的问题,利用GPS 和CNS 输出的高精度导航信息,分别设计了GPS/INS 和CNS/INS 滤波方案,在获得滤波后的导航信息后,将其作为全信息观测量进行二次滤波,最终获得高精度的导航信息。该方法计算较为繁琐,且二次滤波会造成系统实时性变差的问题,不宜开展算法的工程化应用[7-8]。
针对上述问题,本文提出一种基于扩展卡尔曼滤波( Extended Kalman filter, EKF) 的INS/GPS/CNS 全信息导航滤波算法,利用GPS 和CNS 输出的高精度导航信息,结合非线性扩展卡尔曼滤波框架,设计全观测量的滤波算法,通过研制的INS/GPS/CNS 三组合导航系统进行试验验证,验证了所提算法的高精度和长时间工作条件下的稳定性。
1 INS/GPS/CNS 滤波模型
根据INS,GPS 和CNS 的系统特点,建立INS/GPS/CNS 系统的数学模型。
1.1 状态方程模型
根据文献[9],建立INS 数学模型如下:
1)速度误差模型

式中: i 为惯性坐标系; e 为地球坐标系; fn为加速度计测得的比力在导航系中的投影;为东、北、天向的速度误差;,为东、北、天向的平台失准角; ∇n为加速度计零偏在导航坐标系中的投影; ωen为牵连角速度; ωie为地球自转角速度,根据INS 系统特点,有

其中: L 为当地地理纬度, h为系统重心距地面高度,R为地球半径。
2)平台失准角误差方程

式中: εn为陀螺常值漂移在导航坐标系中的投影;
3)位置误差方程
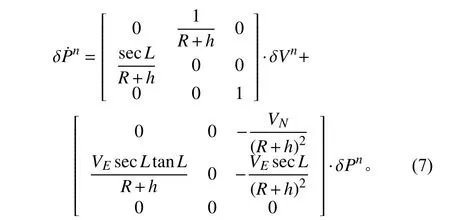
式中:
基于上述分析,选用INS 模型作为INS/CNS/GPS系统滤波的基础框架,可获得状态模型如下:

其中: A为 状态矩阵; B为系统噪声矩阵; W 为系统噪声,具体表达式可参见文献[9]; X为系统状态参量,表达式如下:

1.2 量测方程模型
1)INS/GPS 量测方程
由于GPS 可提供高精度的位置和速度信息,所以取I N S 和G P S 输出的位置和速度信息之差作为INS/GPS 系统的观测量,定义量测方程为:


2)INS/CNS 量测方程
由于INS 输出为机体系下姿态( ΦIb),CNS 为惯性系下姿态( ΦCb),所以需将两坐标系转化后构建量测方程。将姿态信息转化到导航系下:

获得量测方程如下:


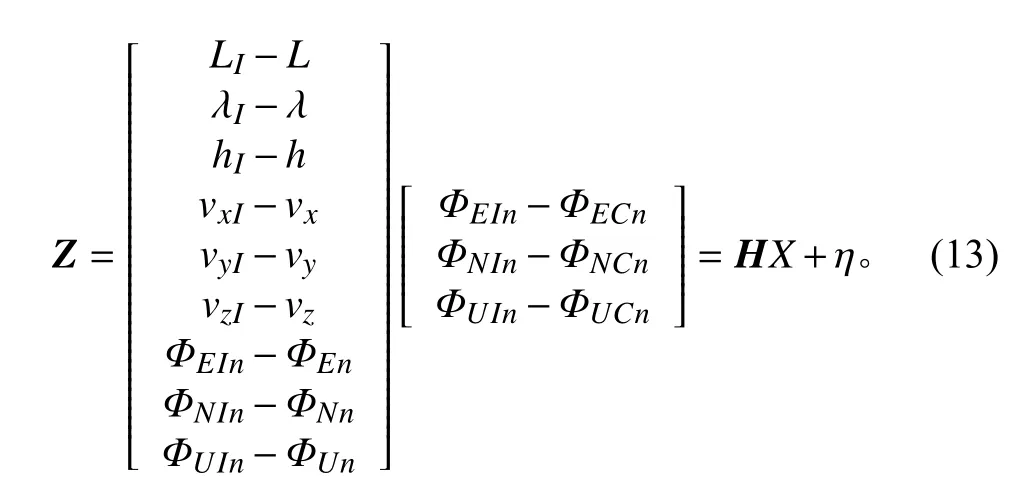
3)INS/GPS/CNS 量测方程
基于上述量测方程,构建INS/GPS/CNS 全信息观测量方程,如下:
2 基于EKF 的INS/GPS/CNS 滤波算法
将式( 8) 和式( 13) 离散化获得系统离散化模型:

根据上述离散化模型建立扩展卡尔曼滤波方程如下:
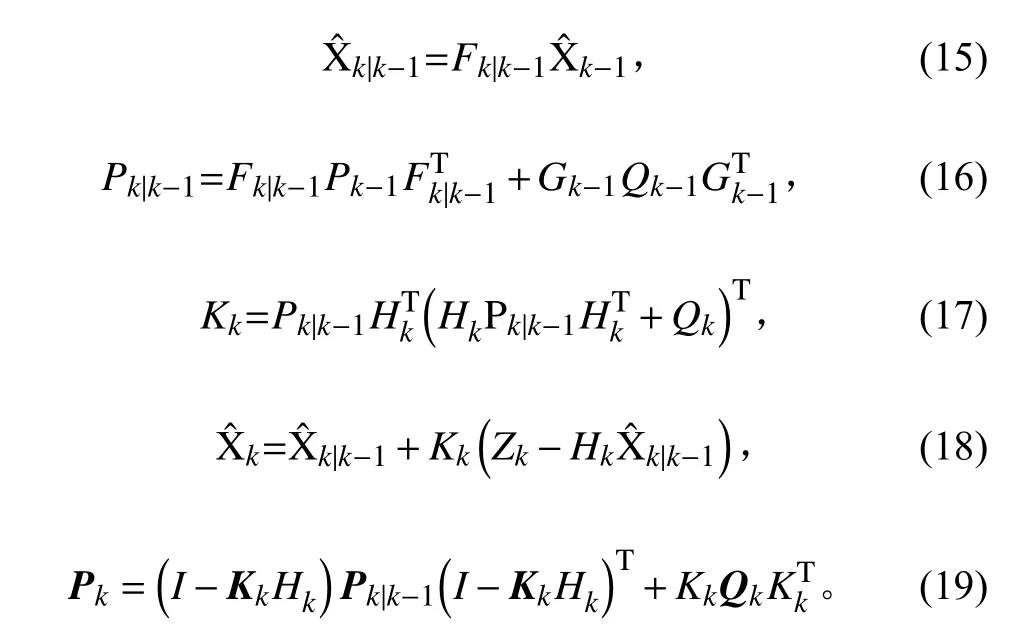
其中: Fk为状态矩阵 Ak的雅克比行列式, Pk, Qk分别为系统噪声和量测噪声协方差矩阵。
在初始状态向量 X0和 初始系统噪声 P0已知时,再根据k 时刻的量测信息 Zk,即可计算得到k 时刻状态向量的最优估计,获得高精度稳定的导航信息输出。
3 试验结果与分析
为验证本文提出的基于EKF 全信息导航算法的有效性,搭建INS/GPS/CNS 三组合导航系统进行精度验证,系统由激光惯导(陀螺漂移 0.001°/h)、GPS 接收机(定位误差100 m)和星敏感器组成,为便于精度验证,采用高精度转台作为姿态基准进行摇摆试验测试,速度、位置基准分别为0 m/s 和0 m。为验证系统在长航时下的精度稳定性,试验时间设为24 h。采用传统两组合滤波算法作为对比,为更直观体现算法稳定性,在进行统计时,以初始时刻的导航误差 e0为基准,计算后续误差 ek相 对于 e0的稳定性A,如下式:

试验结果如图1、图2 及图3 所示。
由图1 可知,2 种滤波算法的处理结果均收敛,但从数据波动程度来看,两组合算法波动较大,且根据稳定性比值峰峰值,三组合算法峰峰值较小,证明算法稳定性较好。由图2 东向速度试验结果,三组合算法误差收敛很快,误差远小于两组合结果,证明三组合算法精度较高。由图3 姿态误差试验结果可知,在长航时条件下,姿态信息有不同程度的发散,这是由于INS 等效东向陀螺漂移的长期稳定性很难保证所致,在增加了CNS 的姿态信息作为观测量后,滤波效果得到明显改善,姿态信息收敛且保持稳定。所以,相较于传统的INS/GPS 两组合扩展卡尔曼滤波算法,INS/GPS/CNS 三组合扩展卡尔曼滤波算法结果精度更高,长航时工作条件下稳定性更好。

图 1 位置误差试验结果对比图Fig.1 Comparison of position error test results

图 2 速度误差试验结果对比图Fig.2 Comparison of speed error test results

图 3 姿态误差试验结果对比图Fig.3 Comparison of attitude error test results
4 结 语
本文针对INS/GPS 两组合系统长航时条件下姿态精度发散、导航精度较低、系统稳定性较差的问题,引入CNS 系统的姿态信息,构建一种基于INS/GPS/CNS 的全信息导航滤波模型,提出一种基于EKF 的INS/GPS/CNS 滤波算法。搭建INS/GPS/CNS 三组合系统对算法有效性进行验证,试验结果表明,相较于传统INS/GPS 两组合算法,所提算法在长航时条件下稳定性强、收敛性好且精度高,工程应用意义较大。
猜你喜欢
北京航空航天大学学报(2022年8期)2022-08-31
科学家(2022年3期)2022-04-11
北京航空航天大学学报(2021年7期)2021-08-13
北京航空航天大学学报(2021年7期)2021-08-13
汽车工程(2021年12期)2021-03-08
北京航空航天大学学报(2019年9期)2019-10-26
智富时代(2019年5期)2019-07-05
智富时代(2019年5期)2019-07-05
电子制作(2019年9期)2019-05-30
电子制作(2019年23期)2019-02-23
