
一种基于相干光时域反射的分布式光纤振动传感系统研制
2019-11-15 09:33邹捷王宇张建国刘昕白清王东靳宝全
中国测试 2019年6期
邹捷 王宇 张建国 刘昕 白清 王东 靳宝全
摘要:针对基于相干光时域反射的分布式光纤振动传感系统中数据量庞大,且需要信号发生器外部驱动,集成度低的缺点,利用现场可编程逻辑门阵列实现传感数据的高速采集与声光调制器的同步驱动,采用USB 3.0实现采集模块与上位机的实时数据传输。搭建一种基于相干光时域反射的分布式光纤振动传感系统,利用本地光与后向瑞利散射光的拍频效应,实现对微弱后向瑞利散射光信号的探测,并提高系统的传感距离。采用正交相位解调方法获取振动信号的位置信息。实验结果表明:该系统可在22km传感光纤上对振动信号进行有效定位,定位误差在20m以内,且系统对正弦波和方波等不同形态的振动信号定位效果一致。
关键词:光纤传感;振动检测;相干光时域反射;后向瑞利散射光
中图分类号:TP211;TP23 文献标志码:A 文章编号:1674-5124(2019)06-0114-07
收稿日期:2018-07-12;收到修改稿日期:2018-09-11
基金项目:山西省煤层气联合研究基金资助项目(2016012011);山西省重点研发计划社会发展项目(201703D321037);山西省应用基础研究计划(201701D221115);山西省回国留学人员科研资助项目(2016-035)
作者简介:邹捷(1993-),女,江苏泰州市人,硕士研究生,专业方向为光纤传感检测。
0 引言
光纤传感作为一种抗电磁干扰的传感技术,具有本质安全、便于敷设、灵敏度高[1]等优点,尤其在振动检测领域得到了广泛关注和研究。激光在光纤中传播时,会由于外部振动的影响造成光纤产生弹光、泊松和应变等效应[2],进而导致光纤折射率、光纤轴向长度和纤芯直径改变,继而使得振动处的光相位发生改变。为此,光相位的动态变化可以体现出振动信号的发生及其位置信息,从而可实现对振动信号的定位。
分布式光纤振动传感系统一般分为前向干涉光技术和后向散射光技术,主要应用于管道安全、周界安防、结构安全检测等场景[3]。其中前向干涉光技术研究较早,主要有马赫泽德干涉仪[4]、迈克尔逊干涉仪[5]和萨格奈克干涉仪[6],通常使用时延原理实现振动信号定位,定位精度较低[7],而且光路结构复杂,参考光路部分通常需要隔温隔振[8]。基于后向散射光的分布式振动传感系统主要包括相位敏感光时域反射技术(φ-OTDR)和相干光时域反射技术(C-OTDR)。φ-OTDR技术对于振动的检测通常采用脉冲光进行探测,后向散射光干涉光强度的变化可以反映出振动信号的位置信息[9]。由于光在传播过程中会不断衰减,系统通常会采用信号放大的方式来实现微弱后向散射光的探测,以提高传感距离。饶云江教授课题组将拉曼放大技术应用到φ-OTDR中,通过光的双向放大实现了62km长度的检测[10],随后又提出在光纤尾端使用拉曼放大,通过调整人纤脉冲光功率和拉曼泵浦功率优化系统[11]。然而,信号放大的同时会引入噪声,降低信号质量,甚至造成信号失真,对信号处理提出了更高的要求,有可能阻碍在工程领域的推广应用。
基于相干光时域反射(C-OTDR)的分布式振动传感系统,可通过提高本地光的光功率来实现对微弱后向瑞利散射光的探测,从而不需要激光放大便可获得更长的传感距离和更高的探测灵敏度[12-13],并可获得更高的信噪比[14]。针对C-OTDR传感系统数据量大且实时性要求高的特点,本文采用现场可编程门阵列(FPGA)实现高速数据采集和声光调制器(AOM)同步驱动。传感信号经USB 3.0传输到上位机进行算法处理,以便有效定位振动信号,从而为C-OTDR技术在结构健康监测、管道安全、周界安防等方面的实际应用提供更多的借鉴。
1 C-OTDR实验装置及传感原理
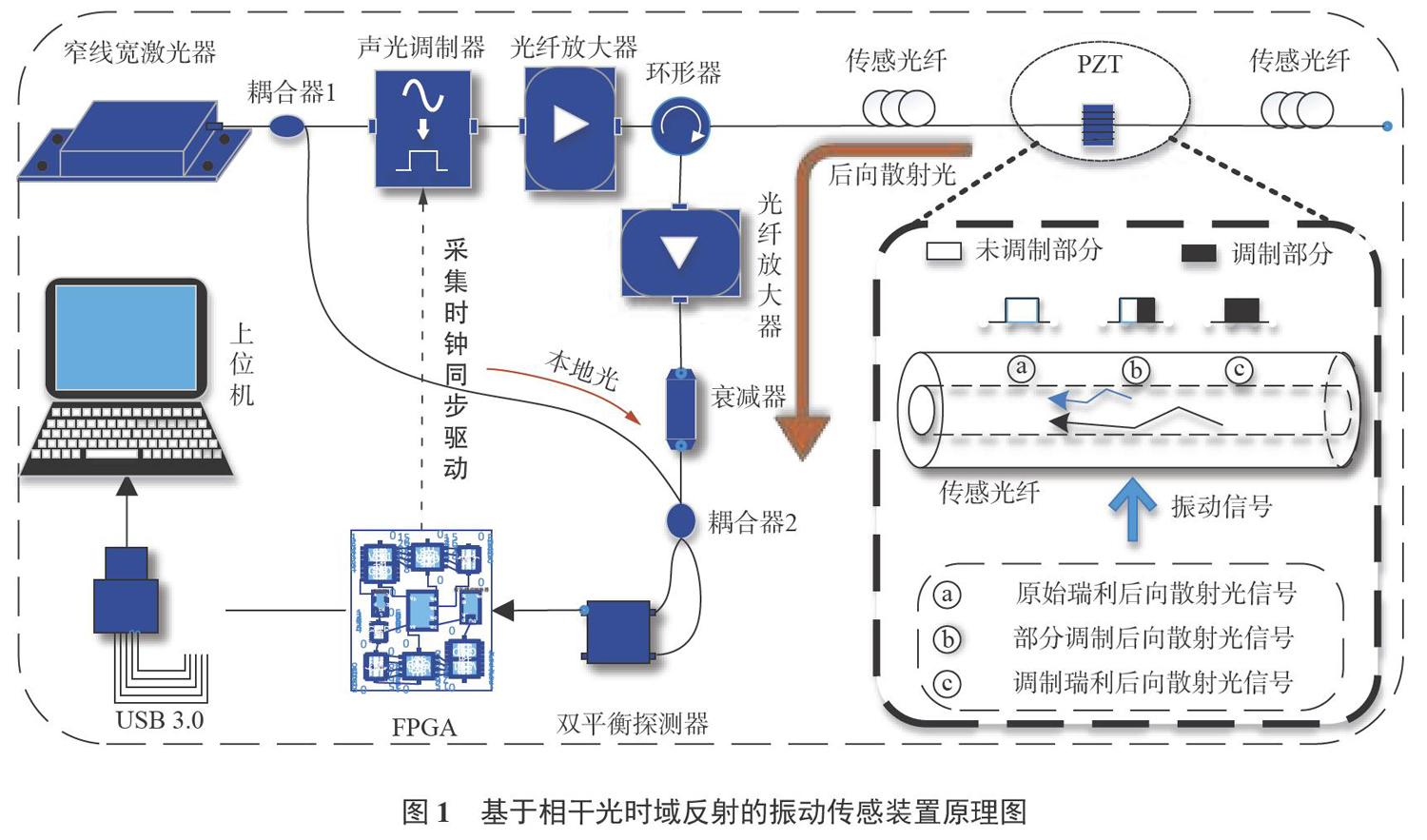
实验系统搭建如图1所示,激光器发出一束连续光,经1:99的耦合器1分成两路,一路作为本地光,一路由声光调制器(AOM)转换成脉冲光,经放大器放大,由环形器注入传感光纤,在传输过程中发生瑞利散射。外部振动作用于光纤导致光纤的芯径、折射率和轴向长度发生变化,经过振动点的后向散射光相位改变,在脉冲周期内发生干涉。返回的散射光与本地光在耦合器2处拍频,由双平衡探测器转为电信号,数据经FPGA采集后由USB3.0实时传输到上位机进行分析。
如图1所示,用压电陶瓷材料(PZT)模拟外界振动作用在传感光纤上。无振动发生时后向瑞利散射光的相位稳定,振动发生时在对应位置处后向瑞利散射光的相位信号会发生突变,由此可以用于检测振动信号。由于AOM的频移效果,干涉叠加的瑞利散射光信号和本地光信号的频率有一个稳定的频率差,在1:1的耦合器2处发生拍频后,由双平衡探测器转换为电信号,电信号由FPGA采集,传输到上位机解调并分析处理。干涉叠加的散射光场如下[15]:
E1=ER(t)expj((ω+△ω))t+ФR(t))(1)式中:ER——干涉场振幅,V;
ω——种子光频率,MHz;
△ω——AOM引入的频移量,在本实验系统中为200MHz:
ФR(t)干涉场相位,rad。
从光源分出的本地光信号[15]表示为式中:EL0——本地光振幅,V;
ФL0(t)本地光初相位,rad。
拍頻后耦合器2处的两路功率[12]分别为
双平衡探测器探测得到两路输出的差模部分为[12]:其中φ(t)为本地光与后向瑞利散射光场的相位之差。双平衡探测器探测到的信号转换为数字量后由FPGA实时采集,并将数据传输到上位机,在数字域对相位进行解调,可得到外界振动的位置信息,实现对振动信号的有效定位。
2 信号分析处理
2.1 相位信号解调
相位信号解调算法主要有正交相位解调移动差分算法、相位生成载波解调差分算法和基于3×3耦合器的解调差分算法,其中后两项解调算法所需增加的信号解调光路结构对外界环境要求较高,因此一般需要隔振处理。本系统的信号解调基于正交相位解调算法,无需附加光路结构,但是需要解决数据量大的问题以保证系统的实时性。该算法与其他同类算法的对比分析如表1所示。
系统的解调原理如图2所示,生成频率与△P(t)相同的标准正弦信号和标准余弦信号,分别与双平衡探测得到的△P(t)相乘,所得信号滤除高频信号分量,即可得到只携带相位信息而不包含频率信息的两路正交信号I和Q,分别为:
二者相比可约去本地光和后向散射光场的强度信息,得到携带相位信息的正切量,对夕1做反正切变换可得相位信号φ(t)。将表征相位信号的强度幅值保存为数组,相邻10个脉冲作为一组,对相邻两组信号做差分处理。外界振动会造成振动位置处的光相位发生变化,光强相对于未发生振动时的光强发生改变,差分处理后得到信号图,图中对应于振动位置的信号会有很高的幅值,产生一个尖峰,由于系统采用脉冲光进行探测,脉冲光入射到光纤中,某一时刻到达光纤上一点时该点的后向瑞利散射光沿光纤回到探测器,沿光纤各点可形成一条后向散射曲线,可由下列公式得到振动信号的位置:
s=vt=v·n0/(2n·fr)(8)式中:fr——探测脉冲光的重复频率,Hz;
n0——信号图中峰值在后向散射曲线中所处的位置;
n——后向散射曲线的总长度;
ν——光在光纤中的传播速度,m/s。
用OTDR仪测量传感光纤起点到振动点的实际长度,其型号选用AOR500-S,测距精度为1.25m。实验测得的峰值根据式(8)解调得到振动信号位置的测量值,将OTDR仪测量的振动点实际位置减去系统的测量值得到了系统定位的误差值。
2.2 数据采集与AOM驱动
由于传感光纤长度超过20km,数据量很大,且系统采用了对外界环境要求低的正交解调算法,计算量大,因此本文选用了具有高速并行处理能力的FPGA对数据进行采集和处理。为了提高传感系统的集成度,FPGA同时驱动AOM,将连续光调制成脉冲光,重复频率为4kHz和8kHz,取代传统的信号发生器的驱动方式。根据实际应用的需要可随时改变脉冲光的脉宽,用以调整传感系统的空间分辨率。基于FPGA的高速数据采集与AOM驱动原理如图3所示。
双平衡探测器将连续光信号转换成模拟电信号,模数转换器(ADC)再将模拟电信号转换成数字量。随后,数据采集控制单元对数据进行累加平均处理与数据传输预处理。异步存储处理单元将传感数据存入FPGA的先人先出(FIFO)临时缓存区域。数据传输控制单元则控制传感数据经USB 3.0接口传输到上位机,以便进行数据后续解调处理。
采集控制和AOM的同步驱动由系统的多时钟信号控制单元进行分配控制。首先时钟晶振产生50MHz的固定时钟频率,由多时钟信号控制单元对50MHz进行分频,生成多个时钟信号。控制单元将生成的时钟信号分别分配给AOM驱动信号生成单元、复位信号生成单元和内部触发信号单元。AOM驱动信号生成单元驱动AOM将光源发出的连续光调制成8kHz的脉冲光。复位信号生成单元用于复位系统以确保采集程序正确有序运行。内部触发信号单元控制数据采集标志和数据传输标志,分别用于控制数据的采集与传输,确保数据采集与传输的准确性、实时性与稳定性。系统的时钟信号控制如图4所示。
FPGA与上位机之间的高速数据传输基于USB3.0技术,使用CYPRESS的EZ-USB FX3进行控制,选用从设备FIFO接口对数据的读写进行操作,经过USB驱动,实现FPGA与上位机间数据的实时传输。在USB串流输入(Stream In)的传输模式下,通过控制MODE标志位、flaga、flagb传输端点空满标志位等来进行数据传输的状态转换,系统框图和传输控制的状态转换如图5所示。
3 实验结果与分析
按照图1搭建实验系统,在总长为10.5km的传感光纤上利用PZT模拟外界振动,振动位置为距传感光纤入射端10km处,振动信号为频率300Hz且幅值为8V的正弦波,系统信号如图6所示。图6(a)是无外界振动时某一时刻采集到的信号曲线,通过观察一段时间内曲线幅值变化可以发现信号整体处于平稳状态。图6(b)是发生振动时某一时刻的信号曲线,图中在红色虚线圈内有一处明显的尖峰,且在一段时间内进行观察可发现该尖峰会发生明显的上下抖动,具有一定的规律性。
为了验证系统的有效性,另外在距传感光纤末端约2.5km、5.5km、7.5km处用PZT施加频率300Hz且幅值为8V的正弦波振动信号,系统信号如图7~图9所示。经过观察,在不同的距离下系统皆具有与10km处振动相似的实验现象,在图7(b)、图8(b)、图9(b)的红色虚线圈内均有一处明显的尖峰,且尖峰发生具有规律性的明显抖动。
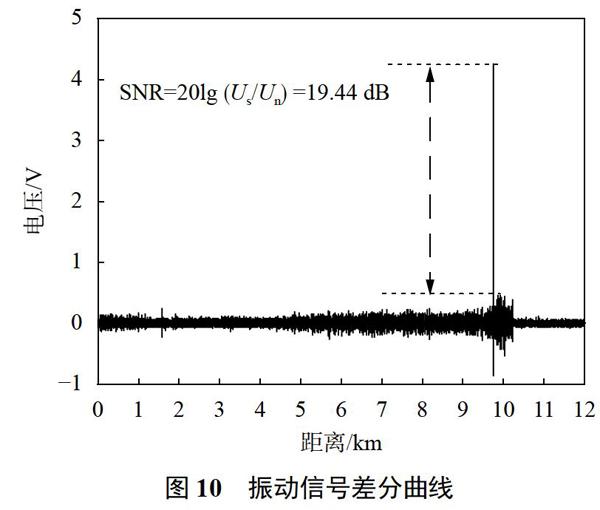
对10km处用PZT施加振动产生的信号曲线进行算法处理,滤除部分共模噪声,得到振动信号差分曲线如图10所示。由图可知,信号曲线在振动位置处有一个极为明显的尖峰,而无振动位置处的信号幅值较小。由此可见,系统能够灵敏地定位到振动信号的发生位置,其中振动信号位置处幅值(U)为4.25V,其他位置处噪声信号最高幅值(Un)为0.4531V,则信噪比(SNR)约为19.44dB。
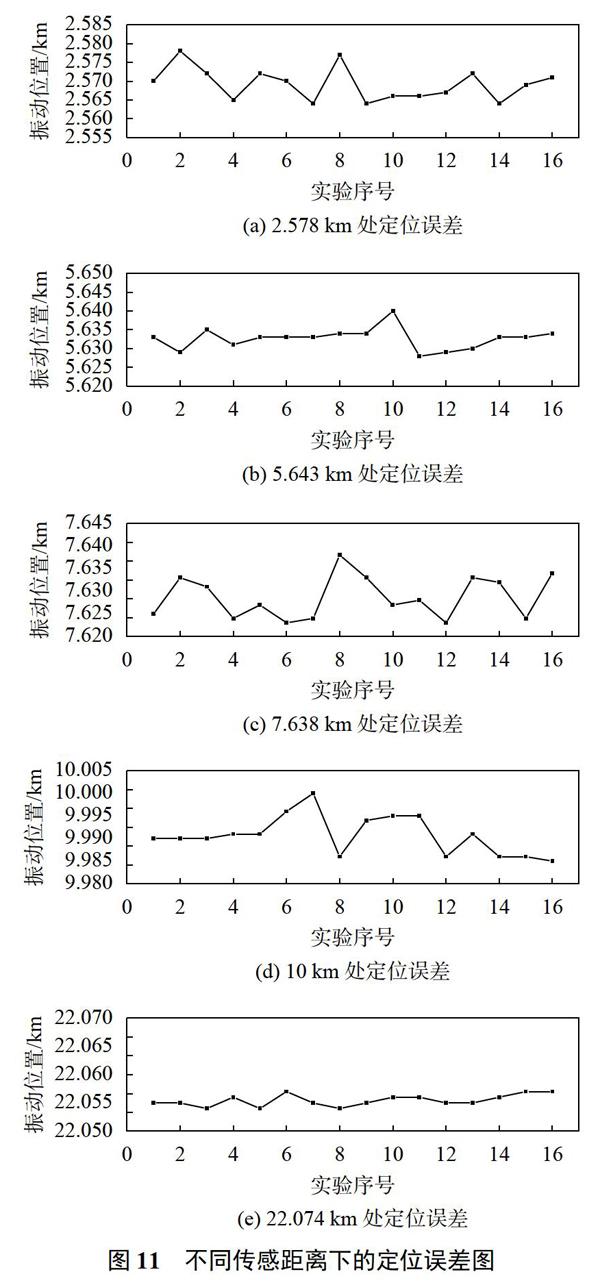
为了进一步验证传感系统对振动信号的定位精度,及对不同振动信号的定位能力,进行了2.5~22km不同距离的定位重復性实验和不同振动形态(如正弦波振动信号与方波振动信号)的定位重复性试验。在距传感光纤末端2.578,5.643,7.638,10,22.074km处用PZT施加频率300Hz且幅值8V的正弦波振动信号,绘制不同传感距离下的误差分析图如图11所示。在2.578,5.643,7.638,10,22.074km处的定位误差分别小于14,15,15,5,20m,在22km处定位误差略大于短距离的定位误差。光在光纤中传播时会有损耗,损耗到一定程度后实验结果受到外界环境噪声的影响,造成定位误差的增加。
另外在传感光纤10km处用PZT分别施加频率300Hz且幅值8V的正弦波与方波振动信号。由16组振动定位数据绘制振动定位误差图如图12所示。由图可知,系统对正弦波、方波等不同的振动信号形态具有基本一致的定位效果,且定位误差在15m以内,表明系统的定位性能良好。
为了直观地表示出本测量系统相比同类测量系统的优缺点,对比分析了本测量系统与同类测量系统的测量范围、便携性、定位误差和性价比等指标如表2所示。本测量系统利用FPGA替代信号发生器实现了对AOM的驱动,结合USB3.0完成数据的采集,大大提高了系统的便携性,降低了系统成本,且同时系统传感距离可达22km,定位误差在20m以内。
4 结束语
本文根据相干光时域反射原理,搭建了G-OTDR分布式光纤振动传感系统。不同于一般的测量系统,本系统利用FPGA和USB 3.0技术完成了数据的高速采集、实时传输和对AOM的同步驱动,解决了系统数据量大的问题,提高了系统的集成度,降低了系统成本,为该系统在工程中的实际应用提供了借鉴。该系统能在22km的传感光纤上对振动发生位置进行定位误差小于20m的有效定位,且针对正弦波、方波等不同形态的振动信号,其定位效果保持一致。实现振动信号的有效定位后,在后续的研究中将对振动信号的具体特征进行提取与分析,为系统的应用提供更多可能。
参考文献
[1]KISHORE P,SRIMANNARAVANA K.Vibration sensorusing 2X2 fiber optic coupler[J].Optical Engineering,2013,52(10):107104.
[2]王建.分布式光纤振动传感系统设计[D].武汉:华中科技大学,2011.
[3]WANG Y,LIU X,JIN B,et al.Optical fiber vibration sensorusing chaotic laser[J].IEEE Photonics Technology Letters,2017,29(16):1336-1339.
[4]CHEN Q,JIN C,BAO Y,et al.A distributed fiber vibrationsensor utilizing dispersion induced walk-off effect in aunidirectional Mach-Zehnder interferometer[J].OpticsExpress,2014,22(3):2167.
[5]TSUDA H,KOO J H,KISHI T.Detection of simulatedacoustic emission with Michelson interferometric fiber-opticsensors[J].Journal of Materials Science Letters,2001,20(1):55-56.
[6]UDD E.A personal tour of the fiber optic Sagnacinterferometer[J].Proc Spie,2009,7316(5):21.
[7]LIU X,JIN B,BAI Q,et al.Distributed fiber-optic sensors forvibration detection[J].Sensors,2016,16(8):1164.
[8]乔学光,邵志华,包维佳,等.光纤超声传感器及应用研究進展[J].物理学报,2017,66(7):128-147.
[9]TAYLOR H F,LEE C E.Apparatus and method for fiberoptic intrusion sensing:US5194847 A[P].1993.
[10]RAO Y J,LUO J,RAN Z L,et al.Long-distance fiber-opticφ-OTDR intrusion sensing system[C]//Proceedings of SPIE-the International Society for Optical Engineering,2009.
[11]彭正谱.高性能长距离相敏光时域反射系统研究及安防应用[D].成都:电子科技大学,2014.
[12]CHEN L,ZHU T,BAO X,et al.Distributed vibration sensorbased on coherent detection of phase-OTDR[J].Journal ofLightwave Technology,2010,28(22):3243-3249.
[13]QIN Z,ZHU T,CHEN L,et al.High sensitivity distributedvibration sensor based on polarization-maintainingconfigurations of phase-OTDR[J].IEEE PhotonicsTechnology Letters,2011,23(15):1091-1093.
[14]HE H,SHAO L Y,LI Z,et al.Self-mixing demodulation forcoherent chase-sensitive OTDR system[J].Sensors,2016,16(5):681.
[15]WANG Z,LI Z,WANG S,et al.CoherentΦ-OTDR based onI/Q demodulation and homodyne detection[J].OpticsExpress,2016,24(2):853-858.
[16]安阳,靳世久,冯欣,等.基于相干瑞利散射的管道安全光纤预警系统[J].天津大学学报(自然科学与工程技术版),2015(1):70-75.
[17]YAN Q,TIAN M,LI X,et al.Coherent(D-OTDR based onpolarization-diversity integrated coherent receiver andheterodyne detection[C]//Optical Fiber Sensors Conference.IEEE,2017.
(编辑:商丹丹)
