
基于光栅传感器的空间靶标定位技术研究
2019-11-15 09:33马游春马子光苏庆庆张丽梅
中国测试 2019年6期
马游春 马子光 苏庆庆 张丽梅
摘要:由于太空环境的特殊性,空间靶标定位相对复杂,给武器的精度评估测试增加困难。针对现有定位技术在精度和使用寿命等方面都存在不足的问题,提出一种基于光栅传感阵列的空间靶标精确定位的方法。模拟靶标受子弹冲击的全过程,并通过力学仿真分析该过程中靶标应力应变的分布情况。搭建数据采集系统,由光栅传感阵列测得靶标各个位置的应变值,通过质心算法进行解算,最终确定射击中心点的位置。经过测试分析,该方法的定位误差在0.5%以内,可实现空间靶标的精确定位。
关键词:光栅传感;靶标定位;应力应变;质心算法
中圖分类号:TH741 文献标志码:A 文章编号:1674-5124(2019)06-0109-05
0 引言
随着军事科技的进步,未来战争已经开始向太空扩展,各类天基武器应运而生,太空狙击枪就是其中之一。在太空狙击枪的研发阶段,通常需要进行多次测试试验,而靶标的精确定位是提高精度指标的关键。在太空环境中,没有像陆地上那样便捷的靶场测试环境,也无法将陆地环境下标定靶标的一系列设备都安装于太空中,因此其环境的特殊性决定了靶标定位的复杂性,这大大增加了太空狙击枪精度测试的难度[1-2]。
目前,国内外关于太空环境中靶标定位的研究多为相机图像标定法[3]。美国在靶标识别定位时采用的是由美国国家航空航天局研发的高级视觉制导传感器(AVGS),该系统使用激光和图像识别技术识别靶标,此种靶标的实现需要采用两种不同波长的激光对其进行照射,同时,靶标制作较为复杂,且在使用时需要一定外界条件的辅助,有一定的局限性。我国的空间靶标定位一般采用张友正摄像机标定法,即对摄像机回传的图像进行算法处理,最终得到中心坐标。此类方法受设备像素限制,无法做到高精度定位,且同样受外界环境条件的限制。
针对现有技术的稳定性不强、定位精度不高等局限性,本文提出了一种基于光栅传感器阵列的空间靶标的质心算法定位技术。光纤光栅具有抗干扰性强、体积小、耐腐蚀等突出优点,不受太空中恶劣环境条件的影响,且光栅对外界物理环境极其敏感,所以可满足高精度定位的要求。该方法是将光栅传感器阵列安装在空间靶标的背部,利用传感器阵列测得靶标的应变分布情况,进而通过质心算法,准确得到靶标中心点。
1 光栅传感器的应变特性
根据光纤布拉格光栅本身的特性,其中心波长λB的公式为
λB=2neff∧(1)式中:∧——光栅的栅格周期;
neff——光纤纤芯的有效折射率。
由式(1)可知,λB与neff和∧呈正比[4]。当外界环境因素(如温度、应力)改变时,A和neff会发生变化,从而导致λB改变,如下式所示:式中:△λB——λB的偏移量,nm;
△neff——neff的改变量;
△∧——∧的变化量。
由式(2)可知,通过测量偏移量ˇλB,即可达到对外界温度、应变等物理量的间接测量。
当对光纤光栅施加应力作用时,其中心波长的变化量可通过下式描述:式中:△L——光栅的轴向变化量;
△α——纤芯直径的变化量;
——弹光效创起的光纤折射率变化;——波导效应引起的光纤折射率变化。
neff也可用光纤的弹光系数p1j(j=1,2)表示:其中,ν为泊松比。
联立式(4)和式(3)可得:
引入系数Kε,令
因此:
对于某一种光纤介质,其Kε通常为固定值。由式(7)不难看出,光栅反射谱中心波长和光栅的轴向应变呈线性关系,因此可以通过测量波长的变化量得出外界物理量所引起的光栅应变[5-6]。
2 靶标应力应变仿真分析
利用ANSYS软件进行子弹射击靶标的力学仿真分析。仿真系统中靶标材料选择特种钢材603钢,靶标大小200mm×200mm,厚度为15mm;设置靶标的屈服强度为2500MPa,弹性模量为105GPa。考虑到高速撞击过程中靶标有可能被子弹击穿从而导致其背部安装的光栅传感器受损,因此子弹选用陶瓷材料[7],直径8mm,长度15mm,设置其初速度1500m/s。建模完成后,模拟子弹对靶标中心的撞击试验,并得到靶标的应力及总位移的仿真云图和曲线拟合图分别如图1和图2所示。
从图2中可以看出,在靶标的中心位置,其应力和总位移都达到最大值,并且向四周逐渐减小,该变化趋势与图1的仿真云图相对应。
3 光栅应变的质心法定位
根据模拟仿真试验得出的靶标应力应变分布情况,由光栅传感阵列测得靶标的应变分布,再经算法解算,就能得到子弹射击中心点的位置ls]。本文采用了5×5的光栅传感器阵列均匀分布于靶标背部,其分布示意图如图3所示。
本文提出质心法解算光栅传感阵列测得的应变值,从而得到最大应变值所在位置,即为射击中心点。根据质心原理[9],本文假设靶标在受到子弹撞击时,其表面的应变分布系统是一个有质量的系统,并由质心计算公式算出的应变质心,即为子弹撞击靶标的位置。在图3中,B1阵列中A1B1处的传感器测得的应变值相比于其他4个点的应变值越大,则撞击的位置越靠近A1B1点。因此在B1阵列中,将这5个点的应变值与X轴的坐标值求卷积和,再与这5个位置的应变和相除,相当于将这5个点的应变集中作用于某一点上,该点即为B1阵列中应变质心的位置,其计算公式如式(8)所示,同理可求得B2、B3、B4和B5各阵列的应变质心位置,并将其求平均值,可得到更加精确的靶标应变质心坐标。
4 光栅解调系统设计
对光栅信号波长进行编码检测,将光信号转变为电信号并进行数据处理显示是光栅信号解调的关键所在。经与其他方法综合比较,该解调系统选择的是基于波长编码解调的可调谐F-P滤波解调法[10]。可调谐F-P腔的结构如图4所示。F-P腔中有两个高反射透镜L1和L2,前者的背面贴有PZT压电陶瓷,能够在固定的范围内移动,其作用是微调腔长;后者不能移动,固定在滤波器上。高透镜L1把人射光转换为平行光传递到F-P腔体中,当给F-P滤波器加载驱动电压时,腔长会因PZT产生伸缩而发生变化,进而导致F-P腔的透射波长也相应改变。
4.1 解调系统硬件设计
该光栅解调系统的组成主要包括光路、电路两大部分,光路部分由ASE光源、光耦合器、F-P滤波器、光栅阵列、梳状标准具、光电转换器PD组成;电路部分主要由信号调理、A/D采集、D/A三角波输出模块、质心法寻峰模块、数据传输模块组成。解调系统的总体框图如图5所示。
解调系统的工作过程为:ASE光源发出的光信号输入F-P滤波器中,滤波器根据加载于其两端的扫描电压值,会选择性输出固定电压范围内的光信号,该信号再进入FBG光栅,只有与光栅的反射中心波长相匹配的光信号被反射出来,经过光耦合器后分成两路相等光强的信号:第一路信号直接由光电探测器转为电信号;第二路经过隔离后进入梳状标准具,实现波长的动态校准,确保测量精度。这两路光信号经光电转换和调理之后由A/D模块进行数据采集,并由FPGA主控模块对A/D转换后的中心波长信号进行数字滤波和质心算法数据处理,从而得光栅反射谱中心波长的变化,再由光纤光栅的应变特性,进而解调出外界应力、温度的变化。
4.2 质心寻峰算法的逻辑设计
在光栅解调系统中,一般运用质心寻峰算法、多项式拟合算法和高斯拟合算法等算法来提取光栅反射谱中心波长的峰值位置。经过试验比较,本文最终选择了质心算法作为光栅寻峰的方法[11],其质心解算原理如图6所示。
该质心寻峰算法的目的是确定光栅反射谱中心波长的峰值位置,其原理与本文之前用到的应变质心定位方法的原理基本相同。将光栅反射谱的波形包围区域的光强看作是这一个区域的质量总和。图中横坐标为三角波扫描电压对应的波长λi,纵坐标为A/D模块的采样值Pi[11]。
光栅反射谱质心法寻峰的计算公式如下式所示:式中:Pth——系统设定的阈值,V;
λ0——与阈值相对应的波长值,nm。
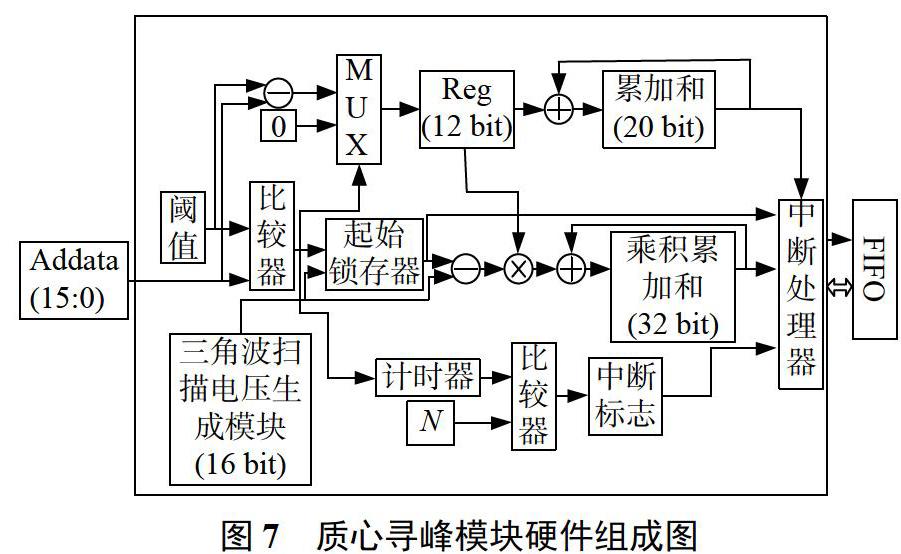
光栅解调系统中,质心算法寻峰模块的逻辑组成如图7所示,该模块旨在完成对信号的阈值判断和数学解算。当该模块内部检测到有A/D采集模块传来的数据时,该数据先被送入比较器与设定好的阈值进行实时比较。当传感信号大于阈值时,质心寻峰模块开始工作,信号在内部需要完成累加和、乘积累加和等运算;当信号小于阈值时运算停止,运算结果被输入FIFO中进行缓存。
质心解算模块程序代码的时序仿真波形如图8所示。可以看出,质心解算模块满足设计要求。
5 系统测试结果分析
在上位机软件中对质心算法模块输出的解调结果进行数据处理,由光纤光栅的应变特性,即可将波长变化转换为应变的变化。
为准确表示射击中心点位置,选择以靶标的某一角作为坐标原点并建立坐标系,靶标上任意一点都可通过坐标精确表示。测试系统所用的靶标为1000mm×1000mm的钢靶,因此,图3中光栅阵列的X、Y轴坐标分别为50,275,500,725,950mm。
在进行系统测试时,选择对靶标中心点(500mm,500mm)进行准确射击,数据采集系统对光栅阵列中各光栅传感器受应变后的光栅反射谱的中心波长进行采集,在上位机软件中对采集的各路光栅中心波长进行数据处理,将中心波长的变化量换算成相对应的应变。因此,各光栅传感器所在位置的应变值如表1所示。
在表1中,分别将每一行的应变值带入式(8)中进行计算,并对计算得到的5个质心值求平均数,可最终求得射击中心点的X=498.45mm。同理可求得射击中心点Y=501.35mm,即中心点坐标为(498.45mm,501.35mm),与实际坐标(500mm,500mm)相比,误差在±0.5%以内。
6 结束语
光纤光栅具有诸多优势,特别是远距离传输,且能在高温、高压、高腐蚀性等恶劣环境下正常工作,因此有着广泛的应用。本文根据传感光栅的应变特性,提出了一种采用光栅传感阵列来测量空间靶标各位置应变分布情况,然后运用质心算法对射击中心点进行准确定位的方法,并在陆地环境试验中证明了该方法切实可行。
空间靶标定位技术是天基武器测试试验的关键,对我军武器装备的发展具有重要价值。未来如何将靶标放置于太空中,并保证测试系统的高可靠性,将是空间靶标精确定位技术的关键。
参考文献
[1]温卓漫.复杂场景下合作靶标的准确快速识别与定位[D].长春:中国科学院长春光学精密机械与物理研究所,2017.
[2]张李俊,黄学祥,冯渭春,等.基于运动路径靶标的空间机器人视觉标定方法[J].机器人,2016,38(2):193-199.
[3]魏振忠,孫文,张广军,等.激光跟踪视觉导引测量中靶标球球心定位方法[J].红外与激光工程,2012,41(4):929-935.
[4]王军辉.基于F-P滤波器的光栅解调系统研究及实现[D].太原:中北大学,2013.
[5]马游春.多光栅采样传感技术研究[D].北京:北京航空航天大学,2012.
[6]姜德.基于FPGA的EFPI传感器解调系统研究[D].太原:中北大学,2017.
[7]LIU T G,WANG S,JIANG J F,et al.Research progress ofoptical fiber sensing technology in aerospace[J].Journal of Instruments,2017,35(8):1682-1692.
[8]章武媚.高应力条件下T/P91钢蠕变行为仿真分析[J].铸造技术,2014,35(5):884-886.
[9]巩宪锋,李忠富,王长松,等.质心原理在光栅传感波长解调中的应用[J].北京科技大学学报,2014,26(4):429-432.
[10]朱浩瀚,秦海昆,张敏,等.光纤布拉格光栅传感解调中的寻峰算法[J].中国激光,2008,35(6):893-897.
[11]LI P,GAO L M,WU Y M,et al.Research on sub pixelpositioning error of weighted centroid method[J].electronicmeasurement technology,2011,45(2):266-279.
(编辑:商丹丹)
