
基于无磁转台的微小型稳定平台性能指标测试方法
2019-11-15 09:33冷贺彬朱平
中国测试 2019年6期
冷贺彬 朱平


摘要:传统的棱镜光学测量方法大多针对大型转台和云台,微小型稳定平台体积小无法安装光学棱镜,且光学测量成本高,为解决传统测量方法无法应用于微小型稳定平台测试中的问题,提出采用无磁转台测量方法。该文利用0.05°高精度无磁转台提供不同倾角姿态参考,采集惯组姿态数据和稳定平台控制码盘数据,分析得到稳定平台角度测量精度、角度指向精度和角度稳定精度。为验证该方法的可行性,搭建微小型稳定平台样机和上位机数据采存软件。测得自制稳定平台姿态测量误差0.6°,角度指向误差0.73°,角度稳定误差0.1°。该测量方法对微小型稳定平台的性能指标测量方面具有广泛的应用前景。
关键词:微小型稳定平台;惯性姿态测量;指向精度;无磁转台
中图分类号:U666.1 文献标志码:A 文章编号:1674-5124(2019)06-0042-04
收稿日期:2018-10-22;收到修改稿日期:2018-11-19
作者简介:冷贺彬(1993-),男,安徽阜阳市人,硕士研究生,专业方向为MEMS惯性姿态测量。
0 引言
随着惯性技术的飞速发展,微小型稳定平台在军用和民用方面得到了广泛应用,如无人机光电吊舱、炮弹导引头、摄影稳像、无人车稳瞄等。但针对微小型稳定平台性能指标的快速测试校准一直是亟待解决的难题[t]。
微小型稳定平台性能指标包括角度测量误差、角度指向误差和角度稳定误差,其中角度测量误差一般采用高精度转台测量,角度指向误差采用光学棱镜测量[2],角度稳定误差是指向精度的均方误差。关于稳定平台惯性测量误差的标定测试国内外研究较多,如文献[3]提出了基于椭球拟合的MEMS惯组测试标定方法,文献[4]中提出关于十二位置测试标定方法。而关于稳定平台指向误差和稳定误差的测量方法报道较少。
在传统的转台校准标定指向误差中,一般采用光学棱镜的测试方法,及在转台旋转轴上安装光学棱镜,但传统的棱镜光学测量方法,由于体积限制无法应用于小型稳定平台设备中,而且光学测量方法成本较高。本文中利用无磁转台测试方法,能够解决稳定平台指向误差和稳定误差测量难度大的问题。并且本文提出的测试方法能够通过一台设备实现角度测量误差、指向误差、平台稳定误差的全部测量。
为验证本文方法的可行性,搭建微小型稳定平台原理样机,利用无磁转台为稳定平台提供不同倾斜角度,测量稳定平台不同倾斜角度下的角度指向误差,通过采集稳定平台电机码盘数据,可以分析稳定平台的稳定误差。利用无磁转台不仅可有效提高姿态测量精度,还可以考核稳定平台的惯性姿态误差。
1 微小型稳定平台系统
为研究不同倾角下的稳定平台性能指标,本文针对图1所示的微小型稳定平台样机进行测量。
本文自制的微小型稳定平台主要由惯组姿态测量模块、舵机控制模块、机械骨架模块、上位机软件等部分组成,如图2所示。其中惯组模块包括三轴陀螺仪、三轴加速度计、三轴磁力计及三轴姿态解算算法[5-6];舵机控制模块包括俯仰轴、横滚轴、航向轴3个舵机,平台稳定主控制板及平台稳定PID闭环控制算法[7-8]。机械结构模块包括内框、中框、外框、底座等。上位机软件用于采集存储惯组数据和舵机位置反馈数据。
微小型稳定平台由陀螺仪、加速度计和磁强计采集三轴角速度信息、三轴加速度信息和三轴磁场强度信息,通过惯組模块中的姿态解算算法得到俯仰、横滚、航向等角度数据[9-12]。将惯组测得的姿态角反馈给稳定平台控制机构,闭环反馈调节平台内框始终保持水平。
2 无磁转台测试方法
本文中微小型稳定平台使用姿态精度为0.05°的无磁转台提供倾角信息,测试系统框图如图3所示。本文提供的测试方法只包括俯仰轴、横滚轴的测试方法,不包括航向轴的测试。将微小型稳定平台放置于无磁转台上,由无磁转台提供高精度倾斜信息[4]。由高精度惯组检测无磁转台倾斜的已知角度,反馈给稳定平台电机,驱动稳定平台机械框架跟随到无磁转台的倾斜位置。上位机软件时刻采存稳定平台电机码盘的位置输出。无磁转台倾斜位置即为高精度参考位置,码盘输出位置即为稳定平台跟随位置。对比码盘输出位置和无磁转台位置,即可得出稳定平台静态下指向误差。
为测量微小型稳定平台的角度测量误差,需用无磁转台对MEMS惯组单独测量。将MEMS惯性测量单元置于无磁转台上,由无磁转台提供高精度姿态信息。惯性测量单元解算姿态通过数据采集卡和上位机软件进行存储。惯性测量单元由三轴加速度计和三轴陀螺仪构成。无磁转台的姿态精度为0.05°,通过对比惯性测量单元解算姿态与无磁转台姿态,可以获取惯性测量单元的姿态测量误差。
角度稳定误差测试只需采集舵机码盘反馈的位置信息,求方差即可得到微小型稳定平台的角度稳定误差,舵机码盘反馈的数据信息由上位机软件采集存储。
3 测试步骤及数据分析
3.1 角度测量误差测试及分析
将惯组测量单元安装在无磁转台内框中,通过蓝牙模块实时传输姿态数据,实验测试实物图如图4所示。惯性测量单元的俯仰轴和横滚轴与无磁转台的俯仰轴横滚正交性通过机械工装保证。
惯性测量单元横滚轴姿态测量范围为-180°~180°,以15°为步长转动无磁转台提供姿态参考信息,通过上位机软件采集10s每个位置下的惯组姿态信息。惯性测量单元俯仰轴姿态测量范围为-90°~90°,以15°为步长转动无磁转台提供姿态参考信息,通过上位机软件采集10s每个位置下的惯组姿态信息。
图5为横滚轴姿态角-180°~180°之间的测试数据,图6为俯仰轴-90°~90°之间的测试数据。表1为俯仰轴指向精度测量数据,表2为横滚轴指向精度测量数据。则本文中搭建的惯组单元横滚轴姿态测量精度为0.6°,俯仰轴姿态测量精度为0.47°。因为稳定平台具有自稳定功能,所以在姿态测量中主要的测量范围为-15°~15°,则本惯组的角度测量误差在-15°~15°量程下的角度测量误差为0.45°。
3.2 指向误差测试及分析
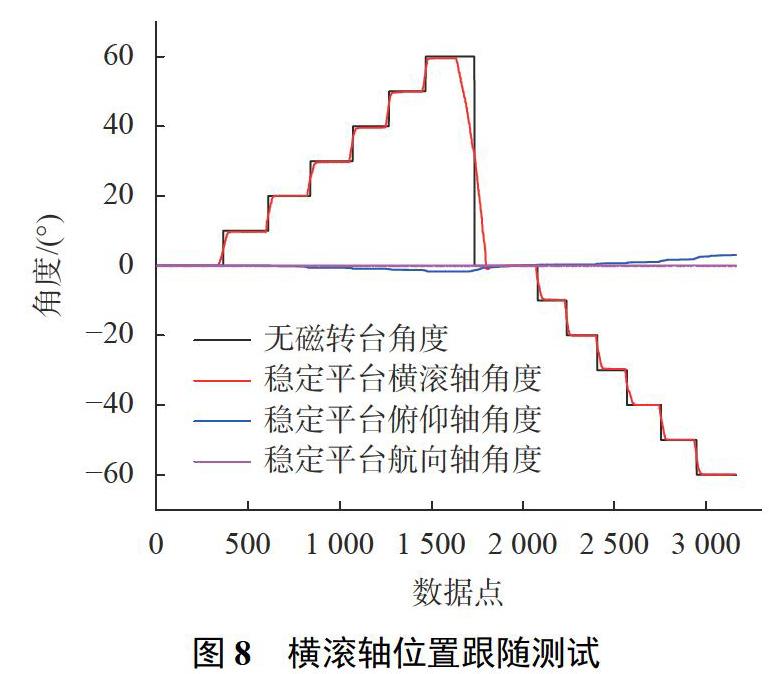
将稳定平台通过安装夹具,用螺钉固定在无磁转台内框上。稳定平台俯仰轴、横滚轴与无磁转台俯仰轴、横滚轴的正交性通过机械工装保证。以10°为步长手动转动无磁转台,由于机械限位,俯仰轴的转动范围为-60°~60°,横滚轴的转动范围为-60°~60°。稳定平台的电机码盘数据通过蓝牙实时传输3个电机的码盘位置,当稳定平台稳定后通过上位机软件静止采集数据10s。上位机采存软件接收到蓝牙传来的数据,进行实时采存。俯仰轴横滚轴分别重复测试两次,图7为稳定平台俯仰轴电机跟随测试转台位置的测试曲线,图8为稳定平台横滚轴电机跟随测试转台位置的测试曲线。得到俯仰轴指向误差和横滚轴指向误差如表3和表4所示。由表中数据可得,本文搭建的微小型稳定平台俯仰轴指向误差为0.73°,横滚轴指向误差为0.64°。
3.3 角度穩定误差测量及分析
角度稳定误差是指稳定平台跟随到无磁转台给定的基准位置后,稳定平台在该位置下电机码盘反馈数据的均方误差值[6]。因此通过采集不同位置下的数据,利用Matlab计算得到本文中微小型稳定平台的角度稳定误差为0.1°。
4 结束语
本文针对传统的光学稳定平台测量方法无法应用于微小型稳定平台性能指标测量的问题,提出了基于无磁转台的测量方法。本文主要针对微小型稳定平台角度测量误差、角度指向误差、角度稳定误差3个性能指标进行测量。采用了无磁转台作为测量仪器,提供高精度的角度基准,对微小型稳定平台性能指标进行测量。通过该方法对微小型稳定平台样机进行测量,得到该样机角度测量误差为0.6°,角度指向误差为0.73°,角度稳定误差为0.1°。通过本实验验证了该测量方法的可行性,且本方法在工程实践中具有广泛的应用前景。
参考文献
[1]许江宁,朱涛,卞鸿巍.航空摄影陀螺稳定平台[J].仪器仪表学报,2007(5):551-557.
[2]惯性技术测试设备主要性能测试方法:GJB 1801-1993[S].1993.
[3]NIU X J,LI Y,ZHANG H P,et al.Fast thermal calibration oflow-grade inertial sensors and inertial measurement units[J].Sensors,2013,13(9):12192-12217.
[4]赵代弟.MARG姿态测量系统抗干扰算法研究[D].太原:中北大学,2015.
[5]施峥嵘.车载设备视轴稳定与跟踪技术研究[D].南京:东南大学,2006.
[6]赵灵.基于MEMS陀螺仪的稳定平台关键技术研究[D].南京:南京理工大学,2012.
[7]HIKERT J M.Inertially stabilized platform technologyconcepts and principles[J].Control Systems,IEEE,2008,28(1):26-46.
[8]MASTEN M K.]nertially stabilized platforms for opticalimaging systems[J].Control Systems,IEEE,2008,28(1):47-64.
[9]李锡广.基于MEMS惯性器件的两轴稳定平台研究[D].太原:中北大学,2014.
[10]田晓春,李杰,范玉宝,等.基于FPGA的MEMS陀螺仪SAR150实时数据采集系统设计[J].计算机测量与控制,2012,20(11):3107-3112.
[11]陈国华,王刚.基于ADIS16255 MEMS芯片陀螺仪的应用研究[J].中国惯性技术学报,2008,16(4):480-483.
[12]高云红,姜森,赵丁,等.基于虚拟仪器的MEMS陀螺仪静态性能测试系统设计[J].自动化应用,2013(11):14-16.
(编辑:商丹丹)
