
基于FPGA的大规模两维面阵数字波束形成*
2019-11-13 03:00刘平安
弹箭与制导学报 2019年3期
刘 颖,卫 炜,梁 宇,袁 军,刘平安
(西安现代控制技术研究所, 西安 710065)
0 引言
在多目标跟踪和引导火力单元时,为了获得较大的作用距离和较窄的跟踪波束,阵面通常体积较为庞大,由于引导时,伺服系统无法让庞大的天线在很短的时间内迅速由目标1调转到目标2[1],因此,为了实现波束的实时调度,采用相控阵天线有其突出的优势。
两维面阵数字阵列,在目标跟踪时具有波束指向调整迅速,波束指向精度高,指向灵活的特点,在目标跟踪及导弹的精确制导方面有着极大的优势。阵列天线的数字波束形成(DBF)技术使雷达能灵活的调整波束指向,通过数字信号处理技术使波束获得超分辨率、低旁瓣的性能[2]。
当滤波器的响应H(θ)和空间频率λ-1sin(θ)或者θ相关时,用一定形状的波束来通过有用方向的信号,抑制不需要方向的干扰,此时的滤波器被称为空域滤波器,又被称为数字波束形成[3]。
1 面阵模型及算法简介
图1所示为两维平面阵列及阵元的坐标关系,共有P×Q个天线单元。在YZ平面上,以坐标点(0,0)阵元为参考点,单元间距分别为d1,d2。
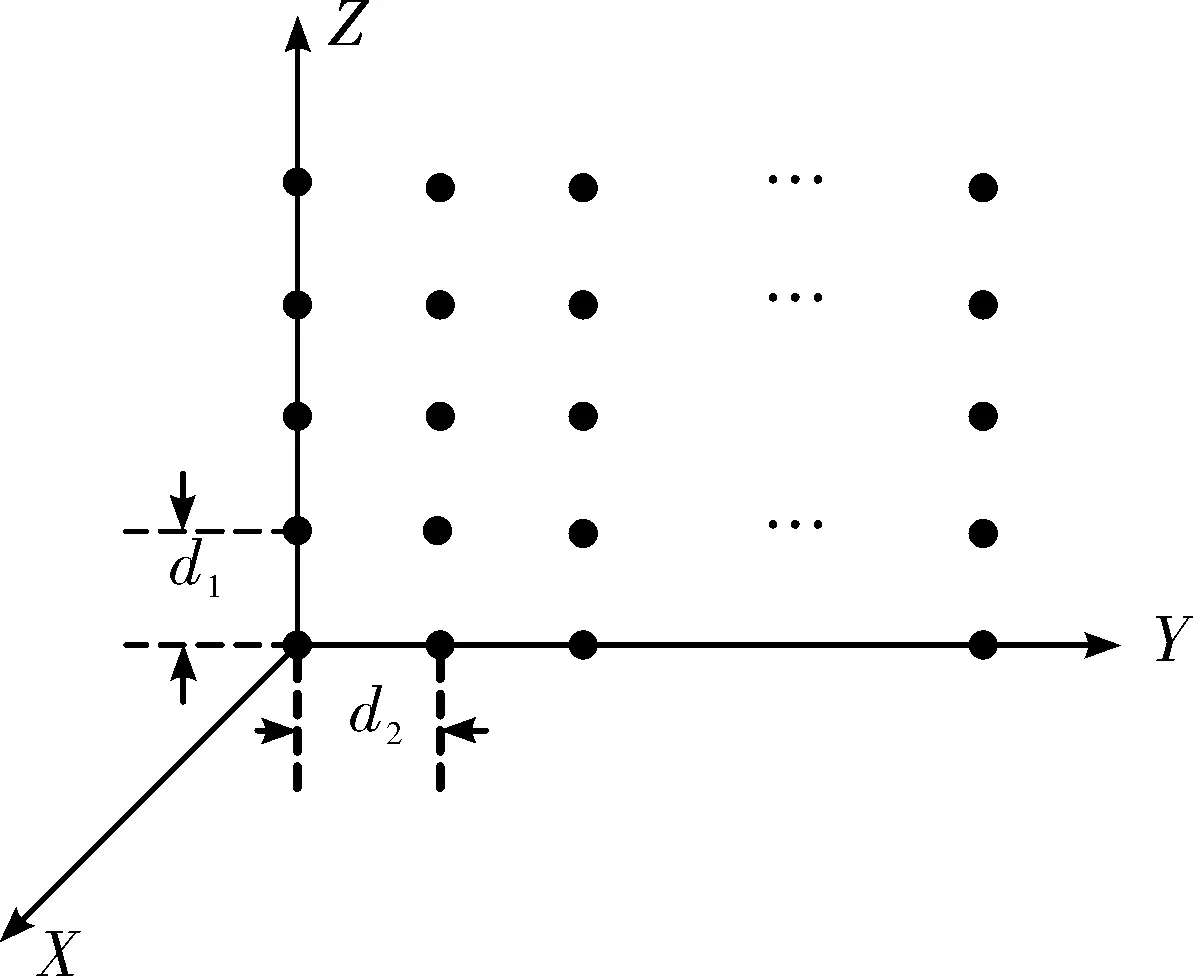
图1 二维阵列及其坐标关系
图2为大地坐标系,φ、θ分别为来波方向的方位角和俯仰角[4]。可以计算出第(p,q)个阵元导向系数为:
能够看出:1)上式中方向图导向系数中,方位和俯仰的指向是耦合的;2)在实际天线系统中,天线的阵面对于地平面是有一定夹角的。这两点使得天线方向图实际测量时,导向矢量的计算变得较为复杂。
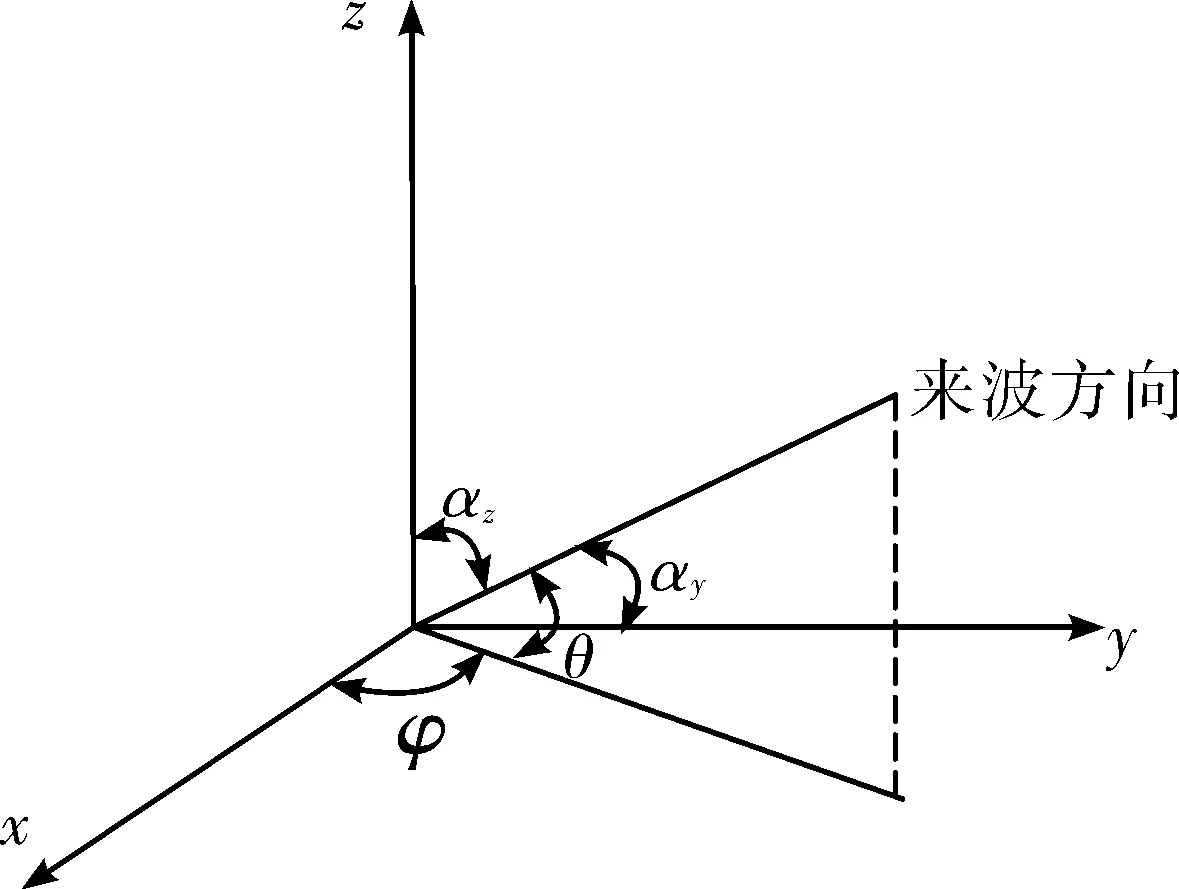
图2 来波方向示意图
文中通过将大地坐标系变化为阵面坐标系,则方位角与俯仰角均以与阵面法线方向的夹角作为指向角度,而阵面法线方向与地面的角度及正北方向的角度可以通过读取天线伺服系统的角度码盘值,获得真实的法线指向,从而获得真实的波束指向。作为工程中使用的计算方法,坐标(p,q)阵元的导向系数为:
即在等幅均匀分布时,面阵方向图可以看成是两个线阵方向图的乘积[5]。即水平和垂直的乘积,并且在以法线作为入射角基准时,方位和俯仰可以独立计算。
2 实现方式
数字波束形成器本质是一个空域滤波器[6],其模型如图3所示。
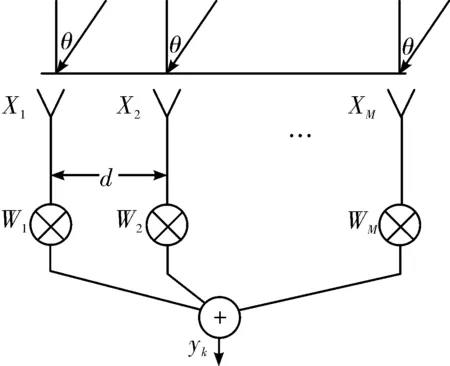
图3 空域滤波器
对于M个阵元的系统,滤波器输出为:
式中:W为要形成波束的系数,即空域滤波器系数。
通过文中第一节的分析,对于两维面阵的波束形成可以分为两个面阵方向图的乘积,即可以看作先完成方位维的波束形成,再完成俯仰维的波束形成。即分为两个线阵,依次完成波束形成处理。
a)一维线阵波束合成处理流程
FPGA通常较之DSP处理器,乘法器的数量具有优势,在处理大规模乘加运算时,适用于大规模并行处理的结构。并且对于一般的窄带雷达,FPGA的处理主频远高于雷达的数据率,这样可以将同时输入的阵元数据进行并串转换排序后,进行乘累加运算,完成某一维度的数字波束形成,对应于图3的模型可以得到图4的处理框图。
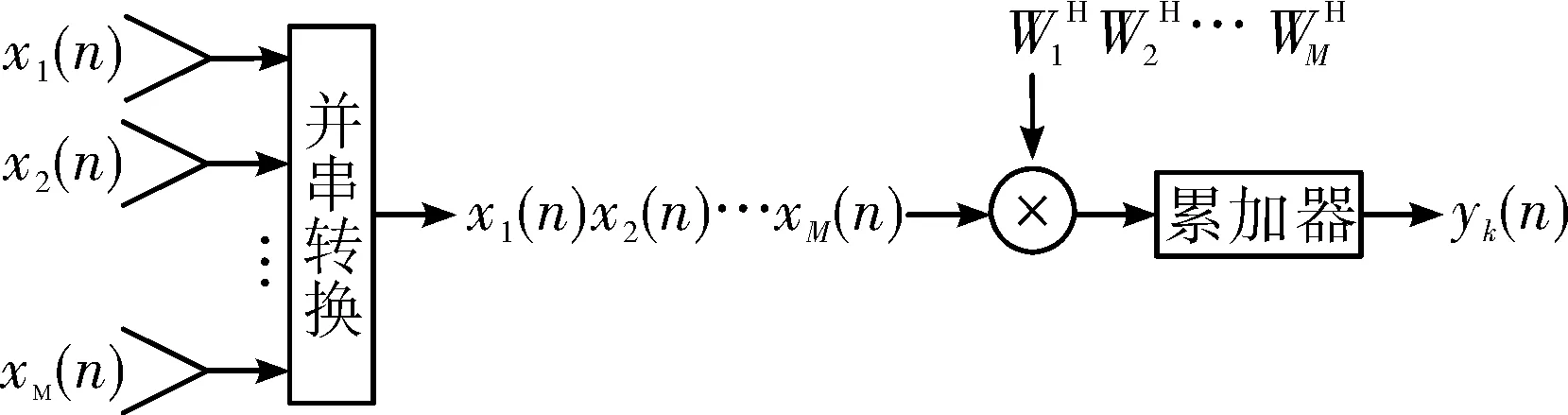
图4 一维线阵DBF的实现框图
通过图5结构,能够完成一个波束的数字波束形成,n=1-M。利用此结构作为基础结构,可以完成两维阵面同时多波束的数字波束合成处理。
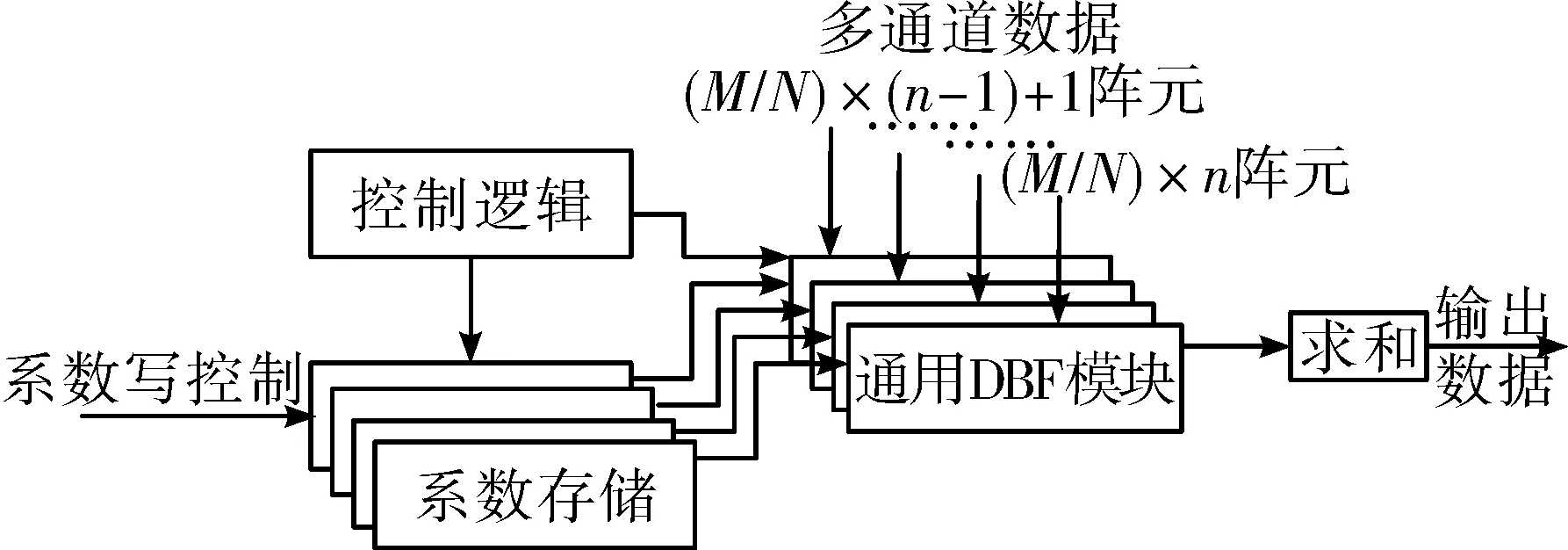
图5 并串结合的DBF模块实现框图
b)二维面阵同时多波束处理流程
通常情况下需要同时形成多波束进行处理。那么需要在处理时调用多个图5所述结构,完成一个波束的处理。对于两维面阵同时多波束的处理流程,见图6所示。
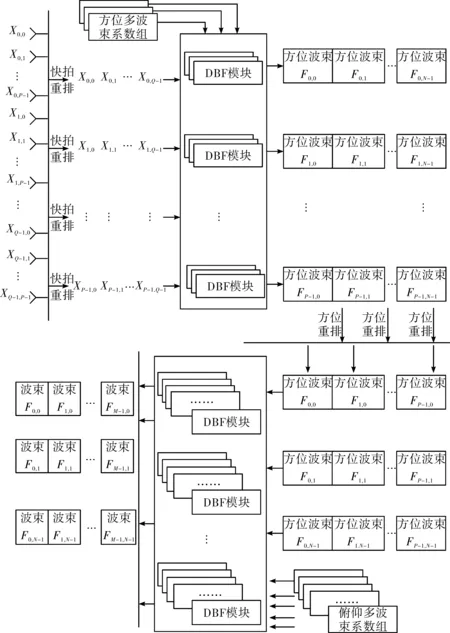
图6 面阵波束形成处理流程示意
如图6所示,阵面总共有P×Q个阵元,其中水平(Y轴)方向P个阵元,垂直(Z轴)方向Q个阵元,总共形成N×M个波束,即:方位为N个波束,俯仰为M个波束。
首先将输入的快拍数据按照行列进行排列成为二维矩阵,对快拍数据按照行进行处理,处理时,根据需要形成的波束个数,确定调用DBF模块的个数,并且加载对应的导向矢量系数。将两维阵面的第一行阵元数据X0,0,X0,1,…,X0,Q-1与第一组方位维系数相乘获得第一行方位维的第一组指向方位波束F0,0,F0,1,…,F0,N-1,依次类推,获得P行上每行各N个指向,依次为F0,0,F0,1,…,F0,N-1,F1,0,F1,1,…,F1,N-1,FP-1,0,FP-1,1,…,FP-1,N-1。之后,对同一方位指向的数据,进行排列,对排列之后的数据,进行俯仰维DBF,即按照列的顺序再进行一次DBF,就能够获得指向期望方位角、期望俯仰角的波束。
c)系数计算
FPGA通常采用定点计算,对于权系数的计算只要求得角度值,通常采用cordic算法实现。一般的FPGA厂商都有专有IPcore用来完成正弦、余弦值的计算,在计算时按照IPcore要求的数据格式输入角度值,如Xilinx cordic IPcore 要求的输入数据格式为2QN(即1 bit符号位,2 bit整数位)。文献[7]中详细介绍了基于Xinlinx IPcore计算导向矢量的方法,这里不再赘述。
3 实例
以32×40的面阵为例:阵面排布如图7所示,同时形成2×15波束时的实测方向图如图8所示,其中方位波束2个,俯仰波束15个。扫描俯仰方向获得俯仰指向,此时天线伺服系统方位角度固定,形成的方位两个波束指向相同,在图8上接近重叠。
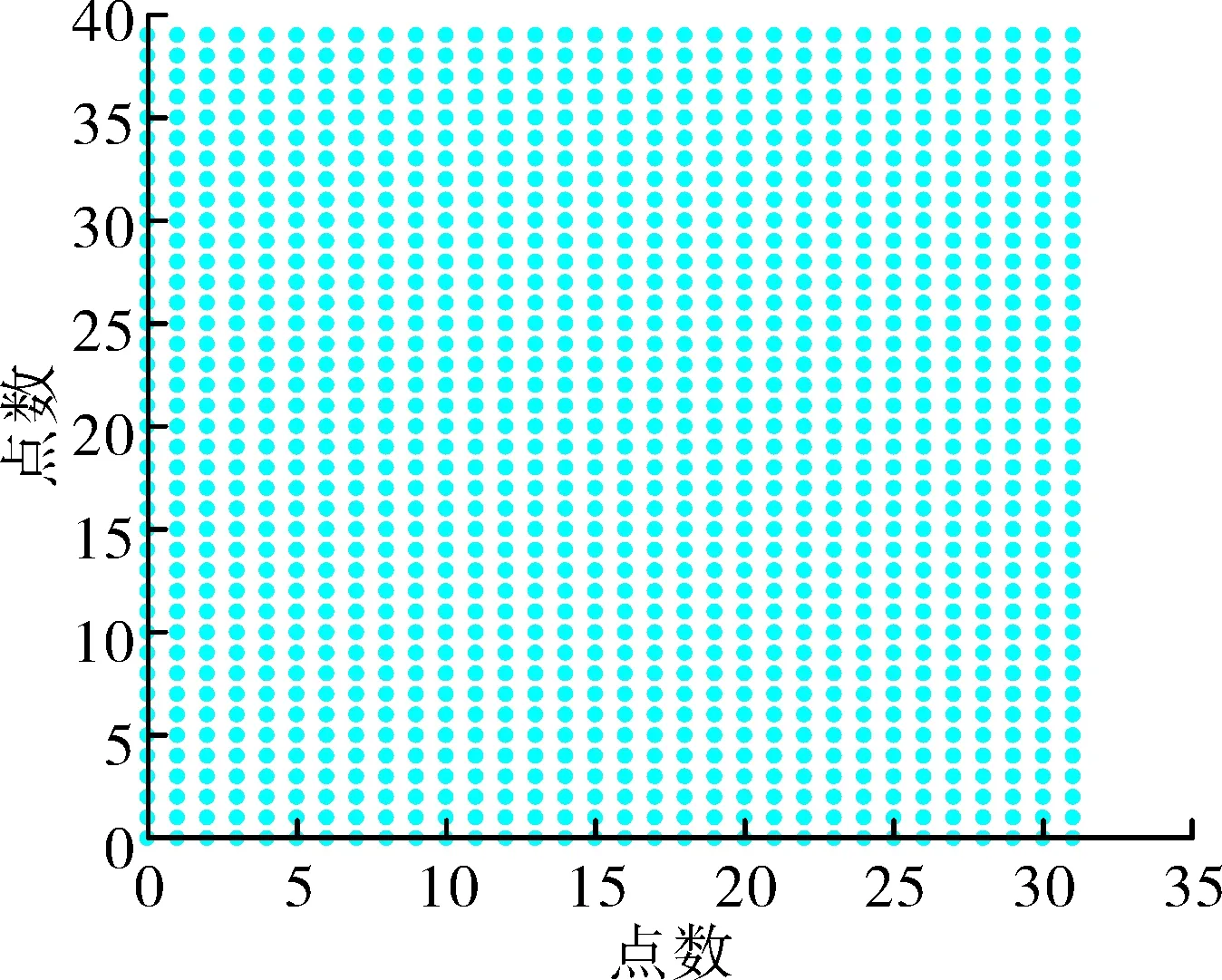
图7 面阵排列方式
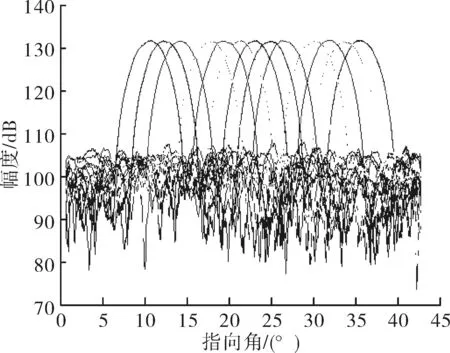
图8 实测方向图
4 结束语
通过对二维面阵DBF的方法进行分析,并合理设置坐标系,将二维面阵转换为两个线阵。提出了一种通用结构,该结构采用了复用FPG乘法器的方法,有效降低了乘法器的数量,并在以上基础上利用先合成方位波束的方法,进一步减少运算量,最后计算俯仰方向进行最终合成。该方法已经在工程中应用,并通过远场方向图测试,得到正确的方向图数据。
猜你喜欢
幼儿园(2021年12期)2021-11-06
中学生数理化(高中版.高考数学)(2021年6期)2021-07-28
成都信息工程大学学报(2021年6期)2021-02-12
数字海洋与水下攻防(2020年6期)2020-12-25
现代电子技术(2020年3期)2020-08-04
舰船科学技术(2020年3期)2020-04-22
福建基础教育研究(2019年6期)2019-05-28
小学生时代·大嘴英语(2015年7期)2015-11-23
为了孩子(孕0~3岁)(2009年6期)2009-07-15
