同化AMSR2数据提高HYDRUS-1D模型土壤湿度模拟精度
2019-11-11 06:44张桂欣祝善友郝振纯
农业工程学报 2019年17期
张桂欣,祝善友,郝振纯
农业水土工程
同化AMSR2数据提高HYDRUS-1D模型土壤湿度模拟精度
张桂欣1,祝善友2,郝振纯3
(1. 南京信息工程大学地理科学学院,南京 210044;2. 南京信息工程大学遥感与测绘工程学院,南京 210044;3. 河海大学水文水资源与水利工程科学国家重点实验室,南京 210098)
同化遥感监测数据提高土壤剖面湿度模拟精度,对区域农业发展等实践与理论领域具有重要意义。该文结合了集合卡尔曼滤波(ensemble Kalman filter,EnKF)方法与HYDRUS-1D模型,同化降尺度后的AMSR2(advanced microwave scanning radiometer 2)微波土壤湿度数据,开展榆社、荫城2个实验站点的土壤剖面湿度模拟。结果表明:在2个实验站点,与直接使用 HYDRUS-1D模型相比,同化具有一定误差的AMSR2土壤湿度数据对不同深度土壤湿度的模拟精度提高都发挥了作用,尤其是对于同化前模拟方案S1(4月1日站点实测含水量)与S4(4月1日遥感含水量),由于HYDRUS-1D模拟时输入了较少数量的土壤湿度数据,数据同化效果与土壤湿度模拟精度提高更为显著;同化前后不同深度的土壤湿度精度对比结果表明,同化效果随深度增加而逐渐减弱。
土壤;湿度;遥感;AMSR2;集合卡尔曼滤波;HYDRUS-1D模型;数据同化
0 引 言
土壤湿度直接反映地表干湿状况,其时空分布特征与变化规律对农业科学管理、区域水资源合理开发与应用、气候变化研究等实践与理论领域都具有重要意义[1]。无论是站点实测、遥感反演还是过程模型模拟,单一方法都无法给出时空连续且精度可靠的土壤湿度数据。数据同化方法将各类观测数据融合到过程模拟模型中,修正动力过程模型的运行状态与结果,是提高土壤湿度模拟与预报精度的有效方法之一。
由于站点实测方法存在着站点布设分布零散、测量结果无法表达土壤湿度时空变异性等问题,许多学者利用集合卡尔曼滤波(EnKF)将遥感监测土壤湿度同化到不同的陆面与水文过程模型中。典型研究例如:Jia等[2]利用EnKF发展了同化微波亮温数据的土壤湿度同化方案,结合通用陆面模型(CLM)开展参数优化以及土壤湿度数据同化研究;Shi等[3]利用EnKF和通用陆面模型进行了土壤湿度同化试验,结果表明陆面模式模拟和同化结果都能比较合理地反映出土壤湿度时空分布;Draper等[4]使用EnKF同化了主动和被动遥感数据,以此改进土壤水分估计;杨晓峰等[5]开展了AMSR-E土壤湿度同化试验,结果表明同化过程整体上提高了模拟精度,但不同下垫面类型模拟精度不同,同化过程依赖于AMSR-E土壤湿度的准确性;吴凯等[6]基于CLM4.0陆面过程模式,采用EnKF开展了3个单点同化试验,同化卫星遥感资料CCI后提高了表层土壤湿度的估计精度;丁建丽等[7]以条件温度植被指数作为观测算子,将EnKF同化方法应用于水文模型HYDRUS-1D,进行干旱区表层土壤水分的模拟,结果表明表层土壤水分含量模拟精度有了明显提高。
AMSR2 3级土壤湿度是目前空间分辨率最高的微波传感器产品,少数研究评价了其在中国局部区域的精度[8],但在不同区域应用与检验的研究相对不多。能否将具有一定误差的AMSR2土壤湿度数据应用并同化到动力过程模型,尚需要进一步开展研究工作。本研究通过建立HYDRUS-1D模型和集合卡尔曼滤波方法相结合的单点土壤水分同化方案,同化AMSR2逐日土壤湿度数据,探讨同化过程对不同深度土壤湿度模拟的作用,旨在为实测数据缺乏区域的土壤剖面湿度监测、动态变化模拟提供数据与方法上的借鉴与参考。
1 研究方法
论文研究通过集合卡尔曼滤波方法,将降尺度后的AMSR2土壤体积含水量同化到HYDRUS-1D模型模拟过程中,用以提高土壤湿度模拟精度,技术路线如图1所示。

图1 研究技术流程
1.1 HYDRUS-1D模型模拟
HYDRUS-1D模型由美国农业部国家盐土实验室开发,是应用数值解法模拟饱和与非饱和多孔介质中水分、能量、溶质运移的一维数值模型[9]。HYDRUS-1D水分运移模型主要由土壤水运动模型、蒸散发模型、根系吸水模型以及初始、边界条件等组成[10],模型假定水分运动过程中气相不起重要作用,并忽略热量梯度作用,采用改进的一维Darcy-Richards方程,模拟变饱和土壤中垂向水分运动。
1.2 基于集合卡尔曼滤波理论的数据同化
集合卡尔曼滤波具有对非线性问题高度适应和运算效率较高的优点[11],被广泛应用于大气科学、海洋科学以及水科学等领域。EnKF是一种顺序数据同化算法,利用了蒙特卡罗方法的思想,用符合高斯分布的一组随机变量代表随机动态预报中的概率密度函数,通过向前积分计算下一时刻状态总体的概率密度函数,并得到该时刻的统计特性,避免了背景误差方差已知或不随时间变化的假设。有关EnKF方法的数据同化理论与算法可参考文献[12-14]。
根据集合卡尔曼滤波理论与技术路线(图1),同化AMSR2土壤湿度数据的主要流程说明如下:
1)初始化背景场,开始HYDRUS-1D模拟,得到时刻的模型模拟值。
2)进入1时刻(开始存在观测值的时刻),启动数据同化计算流程。输入1时刻的预报值生成同化预报值集合;利用1时刻的观测土壤湿度,加上观测误差得到观测土壤湿度集合,通过卡尔曼滤波增益矩阵同化得到土壤湿度同化分析值。根据分析集合平均值和协方差,生成+1时刻的土壤剖面湿度状态估计集合。
3)进入+2时刻。当+2时刻不存在观测值时,输入+1时刻的模型预报值,利用HYDRUS-1D模型模拟得到土壤湿度预报值。当+2时刻存在观测值时,按照步骤(2)计算得到土壤湿度同化分析值,利用土壤湿度同化分析值及其协方差,生成+2时刻的土壤湿度状态估计集合。
4)进入下一个时刻,重复步骤(3)的计算过程,直至完成整个计算周期。
数据同化过程结束后,采用均方根误差(RMSE)、同化效率系数(EFF,%)2个指标分析同化AMSR2土壤湿度数据的效果。同化效率系数(EFF)的计算公式为[13]
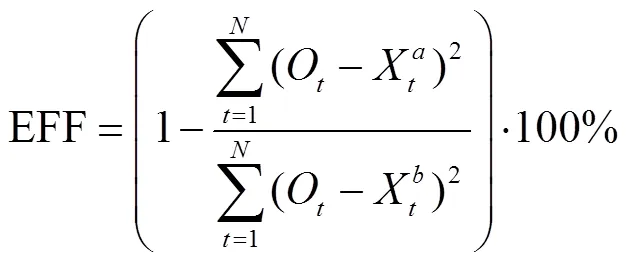
式中O为时刻的观测值;X为时刻的模拟值;上标和分别表示同化后和同化前。EFF大于 0时,表示数据同化后,模拟结果有改善;EFF小于 0,则表示经过数据同化后,模拟结果精度相对于同化前有所下降。同化效率系数EFF值越趋近于 100%,表示同化效果越好。
2 试验方案设计与数据处理
2.1 试验站点
以土壤类型、作物覆盖等参数都存在差异的山西省榆社、荫城2个土壤墒情基本站作为示例,开展单点土壤剖面湿度的HYDRUS-1D模拟与数据同化试验研究。两个试验站点分别位于晋中市榆社县箕城镇石栈道村和长治县荫城镇,站点周边分布着林地、居民地、水体、农田等地物类型,其中榆社站附近的下垫面更为复杂,地表起伏较大。试验站点基本情况如表1所示。
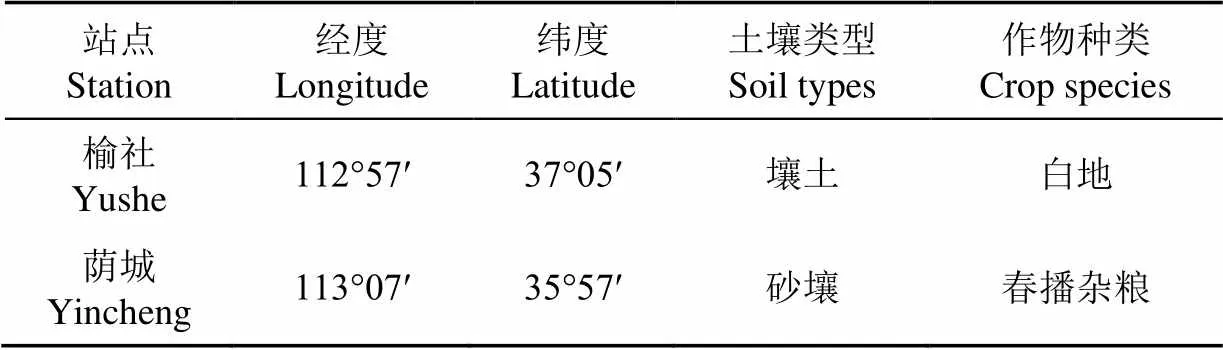
表1 试验站点基本情况
2.2 试验数据及其预处理
各类试验数据时间范围为2013年4月1日至8月31日,其中遥感数据覆盖区域为山西省。
1)MODIS数据产品
MODIS数据产品主要用于AMSR2 10 km分辨率土壤湿度产品降尺度、HYDRUS-1D模拟等方面,包括8 d合成的地表反照率产品MCD43B3、8 d合成的地表温度产品MOD11A2、16 d合成的植被指数产品MOD13A2、8 d合成的叶面积指数LAI产品MOD15A2。用于检验降尺度AMSR2土壤湿度精度的温度植被旱情指数(TVDI)由MOD11A2和MOD13A2数据计算。
2)AMSR2土壤湿度数据
第二代先进微波辐射成像仪(AMSR2),搭载在2012年5月成功发射的地球水环境变动监测卫星(GCOM-W1)上。研究中采用了阿姆斯特丹自由大学与NASA共同研制并发布的夜间降轨时刻的AMSR2 3级全球土壤湿度产品,该产品利用降尺度后的C1波段(6.9 GHz)亮温,通过地表参数反演模型LPRM估算[15-17],产品空间分辨率为10 km。
AMSR2 10 km空间分辨率图像上大多数像元为混合像元,像元内部土壤湿度时空变化非常大,在空间尺度上无法与站点实测数据准确对应。为了更好地利用站点实测数据检验同化AMSR2土壤湿度数据的效果,本研究对原始AMSR2土壤湿度数据进行降尺度处理。通过建立土壤湿度与植被指数、地表温度以及地表反照率之间的关系模型,并假定该模型不随空间尺度发生变化[8,18],降尺度得到1 km分辨率的土壤湿度。
3)土壤墒情站位置的相关数据
土壤湿度实测数据收集自山西省水文水资源勘测局布设的土壤墒情站。土壤墒情数据的测量和处理均遵循水利部制定发布的《土壤墒情监测规范》。土壤墒情站在每月1日、11日、21日3个固定日期采集10、20、40 cm 3个不同深度的土壤样品,在不同深度上重复取样三次,采用标准的烘干称重法测量,将土壤样品置于烘箱中烘干至恒重,计算土壤失水质量与烘干土质量的比值,重复测定取平均值,进而根据站点位置对应的土壤容重数据,将其转换为体积含水量。墒情站土壤湿度测量的相对误差小于2.5%。
在利用HYDRUS-1D模型模拟时,使用了中科院南京土壤研究所提供的1:1 000 000土壤数据集,读取站点位置对应的土壤类型、土壤各组分含量以及土壤分层等信息。根据中国气象局气象数据中心提供的“中国地面气候资料日值数据集(V3.0)”,提取试验站点位置最近气象站的气温、降水量、蒸发量等气象数据。
2.3 HYDRUS-1D模型关键参数确定
1)土壤剖面离散化:土层厚度设定为100 cm,将其分成101个单元,间隔1 cm,并在10、20、40 cm处设置观测点,以便与站点实测值进行对比。
2)土壤水力参数确定:研究中采用参数反演优化法[19],先设定土壤水分运动参数初始值,通过分析这些参数对模拟结果的影响,确定HYDRUS-1D模型敏感参数,进而通过模拟结果与实测数据之间的吻合程度,确定适合于不同土壤墒情站点的土壤水力参数。
3)站点位置叶面积指数设定:榆社、荫城2个站点的作物覆盖类型有一定差别,HYDRUS模型模拟需要的叶面积指数数据来自于MODIS LAI产品MOD15A2。
4)边界条件:根据表2设计的不同模拟方案,将相应日期站点实测土壤湿度或AMSR2土壤体积含水量作为模型初始条件。上边界定为大气边界,接受降水补给,通过蒸散发排泄,下边界为自由排水边界。模拟过程中,采用Feddes模型模拟有作物分布站点的根系吸水过程,采用Penman-Monteith公式计算潜在蒸散发量,使用Beer定律将其转换为潜在蒸发量和潜在蒸腾量。
2.4 AMSR2土壤湿度同化方案设计
以2013年4月1日至8月31日作为研究时段,设计6种不同的模拟与同化方案(表2),在土壤湿度HYDRUS-1D模型模拟基础上,同化有效的每日1 km分辨率的遥感反演土壤体积含水量,并以每月1日、11日、21日的站点实测10、20、40 cm土壤湿度数据,评价分析数据同化前后不同方案的模拟精度。
在同化AMSR2遥感土壤体积含水量时,首先判断每日数据是否有效。当榆社、荫城站点位置对应的植被光学厚度小于0.8且MODIS地表温度数据质量较高,同时土壤体积含水量在0~0.6 cm3/cm3之间时,则认为该日数据有效,将其同化到模拟过程中。
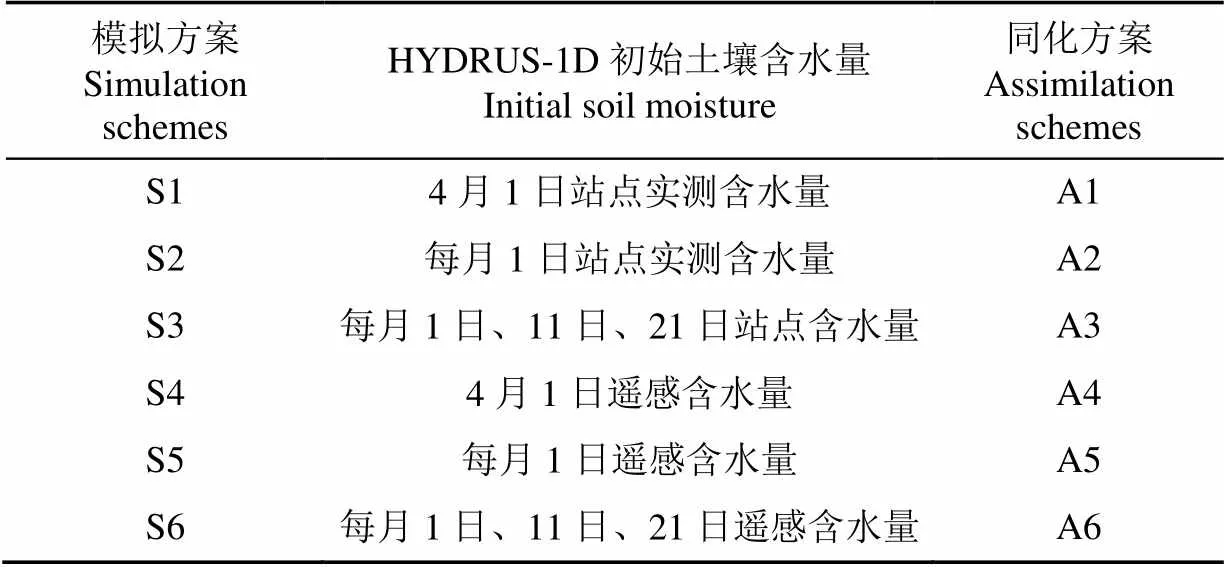
表2 土壤湿度模型模拟与数据同化方案设计
注:模拟方案指同化前的HYDRUS-1D模型直接模拟;同化方案指HYDRUS-1D模型模拟过程中,同化有效的每日遥感反演体积含水量。
Note: Simulation schemes was simulated by HYDRUS-1D without assimilation; Assimilation schemes was simulated by HYDRUS-1D with assimilation of effect daily water content by remote sensing retrieval.
根据集合卡尔曼滤波数据同化的基本理论与计算过程,可以发现集合大小、背景场误差、观测误差、模型误差等参数会影响同化效果与精度。参考相关研究工作[12,20-21],将集合数目直接设定为100,将背景场误差设定为均值为0、标准差为0.01的高斯白噪声[12,20],用于生成初始土壤湿度集合。观测误差主要包括观测算子误差、代表性误差和仪器误差等方面[22],以及不同尺度观测数据互相转换所带来的误差,一般假设观测误差符合高斯分布。研究中根据AMSR2遥感反演土壤湿度与站点实测10 cm土壤湿度之间的对比,设定观测误差的均值为0,标准差为0.01。模型误差与HYDRUS-1D模拟精度有关,根据每月1日、11日、21日站点实测土壤含水量,计算HYDRUS-1D模拟值的均方根误差,将其代入公式(2)得到模型误差[11]。

3 结果与分析
3.1 AMSR2土壤湿度降尺度精度分析
张桂欣等通过站点实测数据、遥感温度植被旱情指数TVDI对10、1 km的AMSR2土壤湿度数据进行了评价,结果表明降尺度后的1 km分辨率数据更能够详细、准确地反映不同位置的土壤湿度差异与空间连续变化特征[8]。本文在此基础上进一步以TVDI作为标准,对比分析了10、1 km分辨率的AMSR2土壤湿度精度。
相关研究已经表明,TVDI能够非常好地反映区域土壤湿度与旱情,被广泛用于土壤湿度反演、旱情时空变化监测研究中[23-24]。由于站点实测与遥感反演土壤湿度在空间尺度上的不完全对应,研究中以2012年10月21日、2013年4月21日两个日期为例,在10、1 km空间分辨率图像上,在山西区域内每隔一定距离取1个像元,绘制不同分辨率土壤体积含水量与对应位置TVDI之间的散点图,结果如图2所示。
根据图2,不同日期、不同空间分辨率的土壤体积含水量与TVDI之间呈负相关关系,即土壤体积含水量越低,TVDI值越大,土壤越干旱。在2种不同尺度下,10 km空间分辨率的土壤体积含水量与TVDI之间的相关性较低,2012年10月28日、2013年4月28日的线性相关性分别为-0.3197、-0.1044,而在1 km空间分辨率下则提高到了-0.9071、-0.9719,相关性分别提高了0.5874、0.8675,这充分说明降尺度后1 km空间分辨率的数据能够更好地反映不同位置之间的土壤湿度差异。相对于原始分辨率土壤湿度数据,降尺度后的1 km分辨率土壤湿度更适合用于HYDRUS-1D模型模拟与同化试验。
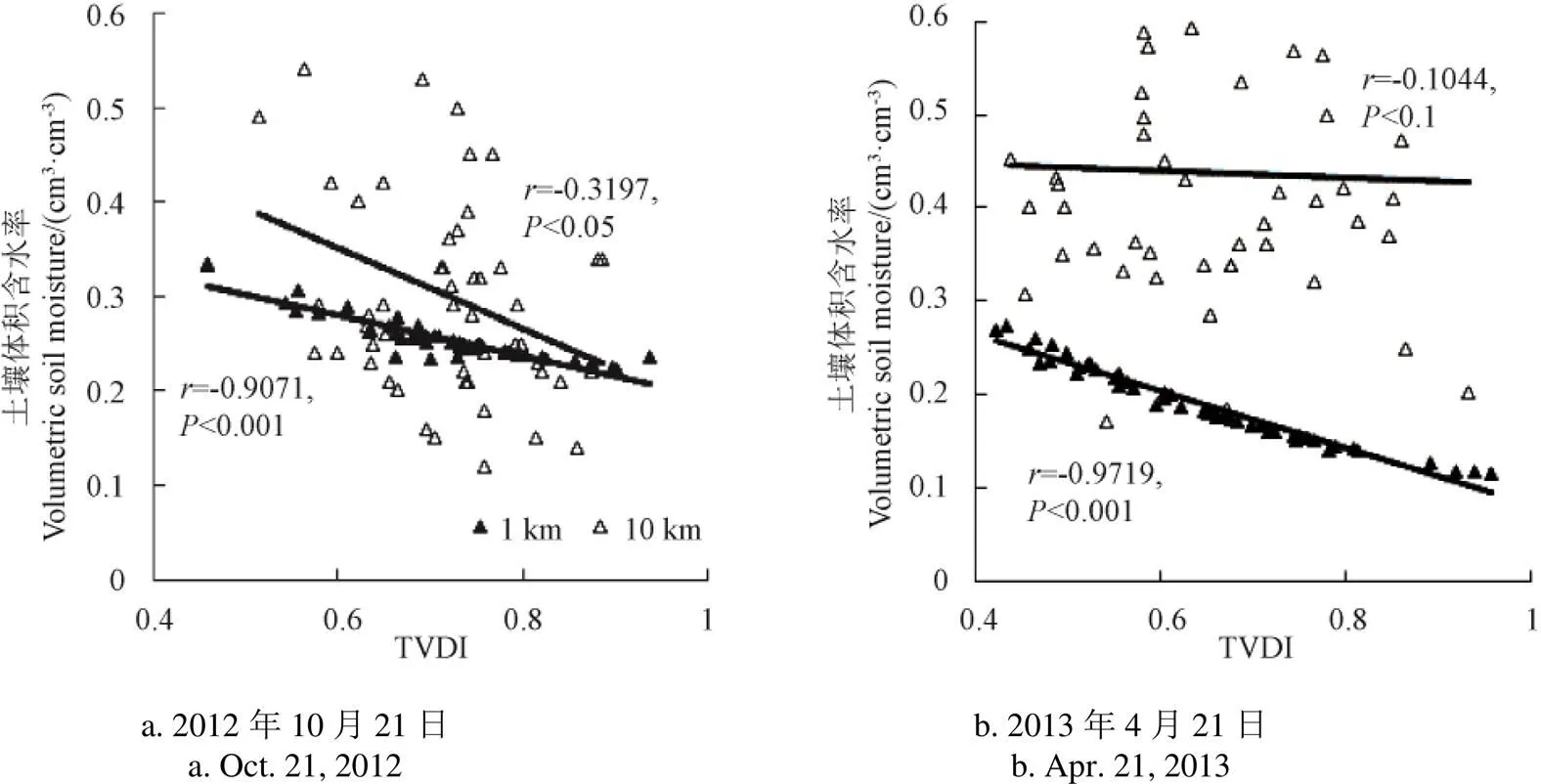
图2 不同分辨率土壤湿度与遥感温度植被旱情指数TVDI 相关关系
3.2 将遥感反演数据同化到模拟方案S1、S2、S3
以榆社、荫城站点实测土壤湿度作为模型初始值,在模拟方案S1、S2、S3基础上,分别进行表2所设计的同化方案A1、A2、A3试验,同化AMSR2遥感反演体积含水量,以检验具有不确定误差的遥感反演数据能否用于改善基于实测数据的模拟结果精度。不同同化方案的效果分析如表3所示。
根据表3,对于模拟方案S1、S2,同化AMSR2遥感反演数据后,相当于增加了HYDRUS-1D模拟时段内观测值的个数,两个墒情站点上的土壤剖面湿度模拟效果均得以改善,均方根误差下降,同化效率系数为正值。而对于模拟方案S3,HYDRUS-1D模拟过程中使用了每月1日、11日、21日的站点实测数据,因此模拟结果与实测数据更为一致,而方案A3同化具有一定误差的AMSR2土壤湿度数据时,模拟结果向偏离实测值、靠近遥感反演值的轨迹发展,与实测土壤湿度数据相比,均方根误差变大,同化效率系数在3个深度上均为负值,
在不同同化方案中,同化方案A1对模拟方案S1的改善效果最好,均方根误差下降幅度最大、同化效率系数最高,主要原因在于过程模拟对土壤湿度初值有较强敏感性[25],初值设定对土壤湿度时间序列变化模拟具有重要影响,模拟方案S1初始的土壤湿度输入只有1个,模拟误差随时间慢慢增大,增加幅度大于模拟方案S2、S3,而在模拟方案S1基础上同化遥感数据,土壤湿度模拟轨迹会慢慢逼近观测值,模拟与实测之间差异逐渐减小。

表3 AMSR2遥感反演数据同化到模拟方案S1、S2、S3的效果分析
根据表3,在两个墒情站点的不同土壤深度上,同化AMSR2遥感反演值能够更大程度地提高浅层土壤湿度的模拟精度,同化效率系数在方案A1、A2中随着剖面深度的增加而减小,但一直是一个正数,说明同化遥感反演数据对深层土壤湿度的模拟精度提高也具有一定作用。在同化方案A3中,负值的同化效率系数随深度增加而增大,也表明遥感数据对深层土壤湿度的同化作用小于浅层土壤。与本文研究结论相一致的是,Crow等研究结果也表明,集合卡尔曼滤波方法同化表层5 cm亮温数据后提高了根区40 cm土壤湿度模拟效果[26]。
需要说明的是,由于不同站点、不同深度土壤湿度遥感反演值、站点测量值与模拟误差大小均存在着差异性,数据同化效率系数的高低虽然表达了模拟精度的改善程度,但并不一定与同化前后均方根误差的改变成正比。
3.3 将遥感反演数据同化到模拟方案S4、S5、S6
针对两个试验站点,以AMSR2遥感反演土壤湿度作为初始值,在HYDRUS-1D模型模拟方案S4、S5、S6基础上,同化站点位置对应的AMSR2遥感土壤湿度得到方案A4、A5、A6的结果,对比分析不同方案同化前后的土壤湿度模拟效果,并将其与直接驱动模型模拟的方案S6进行对比,结果如表4所示。

表4 AMSR2遥感反演数据同化到模拟方案S4、S5、S6的效果分析
根据表4,对比分析同化方案A4、A5、A6结果,由于榆社站HYDRUS-1D模拟误差相对较大,同化遥感监测数据后,不同深度的数据同化效率系数略高于荫城站。3种同化方案中,同化方案A4的均方根误差降低幅度最大、同化效率系数最高,同化方案A5与方案A6的同化效果相当,主要原因是由于模拟方案S4只利用了4月1日的初始值进行HYDRUS-1D模型模拟,模拟精度随时间逐渐下降,而同化具有一定误差的遥感监测反演数据后,土壤剖面湿度模拟效果得以改善。在不同土壤深度上,不同同化方案对模拟精度的提高程度有所不同,总体表现为同化效率系数随深度增加而减小,均方根误差降低增大。
根据表4,与模拟方案S6相比,由于遥感观测更能表达土壤表层湿度信息,在10 cm、20 cm深度上,同化后的两个站点土壤湿度精度都高于HYDRUS-1D直接模拟的方案S6;而在40 cm深度上,同化方案A4、A5均方根误差大于模拟方案S6,但其精度与模拟方案S4、S5相比,则有所提高。同化遥感监测数据能够改善深层土壤湿度模拟效果,主要原因有2点:在HYDRUS-1D模拟过程中,通过水分渗透或水量平衡的物理过程,土壤表层湿度将约束土壤水分在深层的存储与分布,数据同化后表层土壤湿度模拟精度的提高将影响其他深度的土壤湿度模拟;数据同化过程中,遥感反演的表层土壤湿度对模型状态、观测之间的方差、协方差具有一定调整作用。
3.4 AMSR2数据同化前后的土壤湿度时间变化模拟结果对比分析
研究中进一步通过比较数据同化前后,不同方案模拟的土壤湿度随时间变化结果,分析数据同化对HYDRUS-1D模拟结果的影响与改变。以HYDRUS-1D模拟、数据同化误差都相对较大的榆社墒情站为例(表3、4),图3给出了模拟方案S2与S5、对应同化方案A2与A5在10 cm深度上的土壤湿度模拟结果散点图分布。
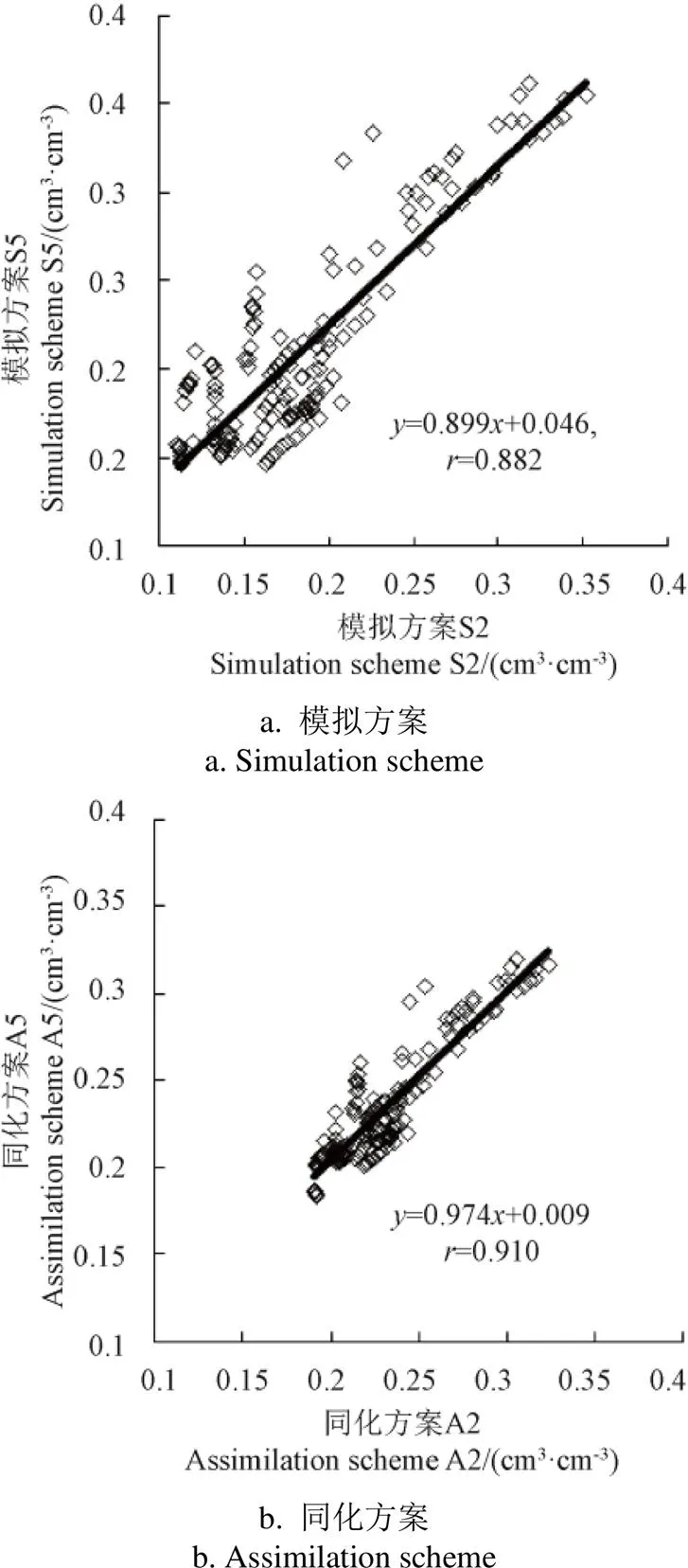
图3 数据同化前后不同方案之间的散点分布
根据图3,数据同化之前HYDRUS-1D模拟得到的方案S2、S5之间的线性相关性为0.882(图3a);数据同化后同化方案A2、A5结果的散点分布及其趋势线更接近于直线=,线性相关性提高到了0.910,相对于同化之前提高了0.028(图3b)。
在20、40 cm的深度上,模拟方案与同化方案之间的关系与图3类似,但由于遥感监测表达的是表层土壤湿度信息,模拟方案S2-S5与同化方案A2-A5模拟结果之间的相关性随模拟深度增加而逐渐下降。这种结果表明,同化遥感反演数据对不同模拟方案的模拟结果都起到了重要影响作用,同化过程对有遥感观测时刻、非观测时刻的HYDRUS-1D模型参数和EnKF模型状态都进行了更新调整,从而使不同同化方案的结果更为一致。
3.5 集合卡尔曼滤波数据同化的敏感性分析
通过调整可能影响数据同化过程的同化频率、背景场误差、模型误差、观测误差的取值,对比分析这些参数调整前后同化结果的均方根误差、同化效率系数的变化,探讨各参数对同化结果的影响。为避免AMSR2遥感反演土壤湿度数据的误差不确定性问题,通过同化榆社墒情站观测数据开展参数敏感性分析。
1)同化频率的影响
以模拟方案S1为基础,设计了3组同化试验,分别是同化每月1日与16日(试验ASS1),每月1、11、21日(试验ASS2),每月1、6、11、16、21日(试验ASS3)的榆社站点实测数据。其中每月6日、16日、26日对应的实测值,根据站点实测土壤湿度、AMSR2卫星反演土壤湿度之间的相关关系,利用遥感监测值反推估算。表5给出了不同同化频率情况下,土壤湿度同化结果的均方根误差与同化效率系数。
由表5可知,与模拟方案S1的模拟结果相比,即使每隔15 d左右同化一次观测数据(试验ASS1),同化算法仍然可以较大程度的改进土壤湿度估算结果,不同深度的同化效率系数超过了30%。随着同化频率增加,不同深度土壤湿度均方根误差逐渐减小,同化效率系数逐渐提高。

表5 同化频率对同化效果的影响分析
注:以模拟方案S1为基础, ASS1、ASS2、ASS3分别为同化每月1日与16日,每月1、11、21日,每月1、6、11、16、21日的榆社站点实测数据。
Note: ASS1, ASS2 and ASS3 were tests by assimilation of measured data from Yushe test station at 1stand 16thper month, 1st, 11thand 21th per month, 1st, 6th, 11th, 16thand 21thper month, based on the S1 simulation scheme.
2)背景场误差的影响
背景场误差是数据同化开始时对模型初始化而加入的噪声,用于生成初始土壤湿度集合。敏感性分析过程中,背景场设定为初始土壤湿度加上均值为0、标准差为0.01的高斯白噪声,通过改变噪声标准差,以步长0.001将其从0.01变化到0.1,分析其改变对不同深度土壤湿度同化结果的影响。结果表明,随着背景场误差增大,不同深度土壤湿度估算均方根误差总体呈缓慢上升趋势但变化幅度不大,体现了集合卡尔曼滤波顺序数据同化的特点,即使初始场的状态变量估计存在很大误差,同化系统经过一段时间也会达到稳定。
3)模型误差的影响
根据站点实测每月1日、11日、21日土壤湿度,计算不同深度的HYDRUS-1D模型均方根误差,以该误差作为标准值,敏感性分析中设定模型误差在标准值的-50%~50%之间变化,变化步长为1%,分析模型误差对数据同化结果的影响。结果表明,随着模型误差增大,不同深度土壤湿度同化结果误差缓慢上升,但总体上对结果影响较小。
4)观测误差的影响
根据观测误差的统计结果对观测数据进行随机扰动,进行物理范围越界检查后生成观测矢量集合[22]。本文假定观测误差均值为0,调整观测误差标准差变化范围为0.01到0.1,变化步长0.001,开展观测误差对数据同化结果的影响分析,图4给出了结果误差随观测误差的分布曲线。
根据图4,随着观测误差增大,不同深度土壤湿度同化结果误差明显提高,观测误差对表层土壤湿度精度的同化影响更为明显,均方根误差上升速度随着模拟深度的增加而减小。这表明,数据同化结果精度在很大程度上与观测数据精度密切相关。

图4 观测误差对数据同化结果的影响
综合上述分析,不同因素对数据同化效果的影响有所不同,其中同化频率、观测误差对于数据同化精度的影响显著,而同化结果对背景场误差、模型误差则相对不敏感。
4 结 论
论文以榆社、荫城2个土壤墒情站点作为实验站点,在土壤湿度HYDRUS-1D模型模拟基础上,设计了6种同化方案,分别将AMSR2遥感土壤湿度同化到不同模拟方案中,探讨不同方案、不同深度土壤湿度的数据同化效果,并分析了不同参数对数据同化结果的影响。
土壤湿度数据同化试验结果表明,同化AMSR2土壤湿度数据对2个站点的不同模拟方案都具有一定的改善作用,尤其是当HYDRUS-1D模拟过程中输入较少数量的土壤湿度数据时,同化效果与模拟精度的提高更为显著。在不同深度上,同化具有一定误差的遥感反演结果对表层土壤湿度模拟具有较为明显的效果,这种同化效果随深度的增加而逐渐减弱,甚至会出现负向作用。数据同化敏感性分析试验结果表明,同化过程与观测数据频率、观测误差密切相关。
本研究直接同化了AMSR2土壤湿度数据,但微波亮温数据反演的土壤湿度在不同位置、不同时间上的误差难以定量化表达。如何在不同的地域地貌、土壤特性、季节特性等状态条件下,通过微波辐射传输模型,选取合适的陆面过程与水文模型直接同化原始微波亮温数据,将是提高土壤湿度模拟精度的重要发展方向。
[1] Legates D R, Mahmood R, Levia D F, et al. Soil moisture: A central and unifying theme in physical geography[J]. Progress in Physical Geography, 2011, 35(1): 65―86.
[2] Jia B, Xie Z, Tian X, et al. A soil moisture assimilation scheme based on the Ensemble Kalman Filter using microwave brightness temperature[J]. Science in China (Series D), 2009, 52(11): 1835―1848.
[3] Shi Chunxiang, Xie Zhenghui, Qian Hui, et al. China land soil moisture EnKF data assimilation based on satellite remote sensing data[J]. Sci China Earth Sci, 2011, 54: 1430―1440.
[4] Draper C S, Reichle R H, De Lannoy G J M, et al. Assimilation of passive and active microwave soil moisture retrievals[J]. Geophysical Research Letters, 2012, 39(4): 1―5.
[5] 杨晓峰,陆其峰,杨忠东. 基于AMSR-E土壤湿度产品的LIS同化试验[J]. 应用气象学报,2013,24(4):435-445. Yang Xiaofeng, Lu Qifeng, Yang Zhongdong. Assimilation experiment of LIS based on AMSR-E soil Moisture products[J]. Journal of Applied Meteorological Science, 2013, 24 (4): 435―445. (in Chinese with English abstract)
[6] 吴凯,舒红. 基于CCI资料与EnKF方法的单点土壤湿度同化[J]. 水资源与水工程学报,2017,28(1):236-243. Wu Kai, Shu Hong. Point-scale soil moisture data assimilation based on CCI data and EnKF method[J]. Journal of Water Resources & Water Engineering, 2017, 28(1): 236―243. (in Chinese with English abstract)
[7] 丁建丽,陈文倩,王璐. HYDRUS 模型与遥感集合卡尔曼滤波同化提高土壤水分监测精度[J]. 农业工程学报,2017,33(14):166―172. Ding Jianli, Chen Wenqian, Wang Lu. Improving monitoring precision of soil moisture by assimilation of HYDRUS model and remote sensing-based data by ensemble Kalman filter[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2017, 33(14): 166―172. (in Chinese with English abstract)
[8] 张桂欣,郝振纯,祝善友,等. AMSR2缺失数据重建及其土壤湿度反演精度评价. 农业工程学报,2016,32(20):137―143. Zhang Guixin, Hao Zhenchun, Zhu Shanyou, et al. Missing data reconstruction and evaluation of retrieval precision for AMSR2 soil moisture product[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(20): 137―143. (in Chinese with English abstract)
[9] Yi C Q, Fan J. Application of HYDRUS-1D model to provide antecedent soil water contents for analysis of runoff and soil erosion from a slope on the Loess Plateau[J]. Catena, 2016, 139: 1-8.
[10] 王鹏,宋献方,袁瑞强,等. 基于HYDRUS-1D模型的农田SPAC系统水分通量估算-以山西省运城市董村农场为例[J]. 地理研究,2011,30(4):622―634. Wang Peng, Song Xianfang, Yuan Ruiqiang, et al. Water flux estimation in SPAC system of farmland using Hydrus-1d model: A case of Dongcun Farm in Yuncheng City, Shanxi Province[J]. Geographical Research, 2011, 30(4): 622―634. (in Chinese with English abstract)
[11] Evensen G. The ensemble Kalman filter: Theoretical formulation and practical implementation[J]. Ocean Dynamics, 2003, 53(4): 343―367.
[12] 王文,刘永伟,寇小华,等. 基于集合卡尔曼滤波和HYDRUS-1D模型的土壤剖面含水量同化试验[J]. 水利学报,2012,43(11):1302―1311. Wang Wen, Liu Yongwei, Kou Xiaohua, et al. EnKF and HYDRUS-1D based data assimilation experiments for improving soil moisture profile prediction[J]. Journal of Hydraulic Engineering, 2012, 43(11): 1302―1311. (in Chinese with English abstract)
[13] 陈鹤,杨大文,刘钰,等. 集合卡尔曼滤波数据同化方法改进土壤水分模拟效果[J]. 农业工程学报,2016,32(2):99―104. Chen He, Yang Dawen, Liu Yu, et al. Data assimilation technique based on ensemble Kalman filter for improving soil water content estimation[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2016, 32(2): 99―104. (in Chinese with English abstract)
[14] 付晓雷,余钟波,丁永建,等. 不同滤波算法在土壤湿度同化中的应用[J]. 冰川冻土,2018,40(3):580―587. Fu Xiaolei, Yu Zhongbo, Ding Yongjian, et al. Application of different filters in soil moisture assimilation[J]. Journal of Glaciology and Geocryology, 2018, 40(3): 580―587. (in Chinese with English abstract)
[15] 王安琪,施建成,宫辉力,等. 降尺度土壤水分信息与植被生长参量的时空关系[J]. 农业工程学报,2012,28(增刊1):164―169. Wang Anqi, Shi Jiancheng, Gong Huili, et al. Space-time analysis on downscaled soil moisture data and parameters of plant growth[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2012, 28(Supp. 1): 164―169. (in Chinese with English abstract)
[16] De J R, Holmes T, Parinussa R M, et al. A spatial coherent global soil moisture product with improved temporal resolution[J]. Journal of Hydrology, 2014, 516: 284―296.
[17] Parinussa R M, Holmes T R H, Wanders N, et al. A preliminary study toward consistent soil moisture from AMSR2[J]. Journal of Hydrometeorology, 2015, 16(2): 932-947.
[18] María P, Adriano C, MercèV L, et al. Downscaling SMOS-derived soil moisture using MODIS visible/infrared data[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(9): 3156―3166.
[19] Woehling T, Vrugt J A, Barkle G F. Comparison of three multiobjective optimization algorithms for inverse modeling of vadose zone hydraulic properties[J]. Soil Science Society of America Journal, 2008, 72: 305―319.
[20] Mitchell H L, Houtekamer P, Pellerin G. Ensemble size, balance, and model error representation in an ensemble Kalman filter[J]. Monthly Weather Review, 2002, 130(11): 2791―2808.
[21] 黄春林,李新. 基于集合卡尔曼滤波的土壤水分同化试验[J]. 高原气象,2006,25(4):665―671. Huang Chunlin, Li Xin. Experiments of soil moisture data assimilation system based on ensemble Kalman filter[J]. Plateau Meteorology, 2006, 25(4): 665―671. (in Chinese with English abstract)
[22] 摆玉龙,李新,韩旭军. 陆面数据同化系统误差问题研究综述[J]. 地球科学进展,2011,26(8):795―804. Bai Yulong, Li Xin, Han Xujun. A review of error problems for land data assimilation systems[J]. Advances in Earth Science, 2011, 26(8): 795―804. (in Chinese with English abstract)
[23] 鲍艳松,严婧,闵锦忠,等. 基于温度植被干旱指数的江苏淮北地区农业旱情监测[J]. 农业工程学报,2014,30(7):163―172. Bao Yansong, Yan Jing, Min Jinzhong, et al. Agricultural drought monitoring in north Jiangsu by using temperature vegetation dryness index[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2014, 30(7): 163-172. (in Chinese with English abstract)
[24] Zeng J Y, Li Z, Chen Q, et al. Evaluation of remotely sensed and reanalysis soil moisture products over the Tibetan Plateau using in-situ observations[J]. Remote Sensing of Environment, 2015, 163(1): 91―110.
[25] 林朝晖,杨小松,郭裕福. 陆面过程模式对土壤含水量初值的敏感性研究[J]. 气候与环境研究,2001,6(2):240―248. Lin Chaohui, Yang Xiaosong, Guo Yufu. Sensitivity of land surface model to the initial condition of soil moisture[J]. Climatic and Environmental Research, 2001, 6(2): 240―248. (in Chinese with English abstract)
[26] Crow W T, Wood E F. The assimilation of remotely sensed soil brightness temperature imagery into a land surface model using Ensemble Kalman filtering: A case study based on ESTAR measurements during SGP97[J]. Advances in Water Resources, 2003, 26: 137―149.
Assimilation of AMSR2 data improving simulation accuracy of soil moisture by using HYDRUS-1D model
Zhang Guixin1, Zhu Shanyou2, Hao Zhenchun3
(1.,,210044,;2.,,210044,; 3.,,210098,)
The spatiotemporal distribution of soil moisture plays an important role in many fields including hydrological processes, agricultural management and climate change. Due to the limitation in in-situ measurement of soil moisture and its dynamic process, accurately estimating it at different soil depth by assimilating remote sensing data into soil hydraulic model has
increased attention. Combining the ensemble Kalman filter (EnKF) method with the hydrological simulation model HYDRUS-1D, this paper simulated soil moisture dynamics at soil profile scale and evaluated its precision by assimilating soil moisture retrieved from spatial resolution of 1 km and soil moisture downscaled from microwave sensor of the advanced microwave scanning radiometer 2 (AMSR2). The downscaled soil moisture was calculated using a scale-independent multi-parameter linear model by combining the multi-kinds of the optical MODIS image data including land surface temperature, albedo, and the normalized difference between vegetation index products. Using field measurement data and the downscaled soil moisture at resolution of 1km as the initial condition to the HYDRUS-1D model, we designed six assimilation schemes and compared them with the associated results simulated from the HYDRUS-1D model. The soil moisture at different depth from April 1 to August 31 in 2013 at Yushe and Yincheng in Shanxi province was simulated using the six designed schemes, and the simulated results were compared with the data measured on 1, 11 and 21 of each month at soil depth of 10, 20 and 40 cm, respectively. The results indicated that the precision of the estimated soil moisture at the two location was comparable, and the assimilated downscaled AMSR2 data can effectively improve soil moisture estimation, especially in the surface soil. When there were not enough field measurement data or remotely sensed soil moisture to drive the HYDRUS-1D model as initial condition, the HYDRUS-1D simulation could give rise to significant errors and assimilation results were more precise. Compared with the simulation schemes S1, S2, the root mean square error (RMSE) of the assimilation schemes A1 and A2 was low, and the effectiveness coefficients of A1 and A2 at different soil depth are higher than 19% and 13% respectively. Compared to S3, the effectiveness coefficients of A3 are negative due to some uncertain errors associated with the assimilated AMSR2 soil moisture. For schemes S4, S5 and S6 simulated directly from the HYDRUS-1D model using the AMSR2 monitored soil moisture, their effectiveness coefficients at different depth are all positive and greater than that of schemes A1, A2 and A3. For temporal change in soil moisture, the correlation between different schemes after assimilation are higher than that simulated directly from the HYDRUS-1D model, with the correlation decreasing with soil depth because the AMSR2 only captured the soil moisture in top soil. Sensitivity analysis reveals that the precision is impacted mostly by observation frequency and its errors, and it was insensitive to the background errors and the model simulation errors.
soils; moisture; remote sensing; AMSR2; ensemble Kalman filter; HYDRUS-1D model; data assimilation
2019-02-20
2019-08-29
国家自然科学基金项目(41571418、41871028);江苏省“青蓝工程”项目
张桂欣,讲师,博士,主要研究方向为3S技术水文水资源应用。Email:zgxzsy@163.com
10.11975/j.issn.1002-6819.2019.17.011
S161.4
A
1002-6819(2019)-17-0079-08
张桂欣,祝善友,郝振纯.同化AMSR2数据提高HYDRUS-1D模型土壤湿度模拟精度[J]农业工程学报,2019,35(17):79-86. doi:10.11975/j.issn.1002-6819.2019.17.011 http://www.tcsae.org
Zhang Guixin, Zhu Shanyou, Hao Zhenchun.Assimilation of AMSR2 data improving simulation accuracy of soil moisture by using HYDRUS-1D model[J]. Transactions of the Chinese Society of Agricultural Engineering (Transactions of the CSAE), 2019, 35(17): 79-86. (in Chinese with English abstract) doi:10.11975/j.issn.1002-6819.2019.17.011 http://www.tcsae.org
猜你喜欢
气象与环境学报(2022年4期)2022-09-22
中等数学(2022年5期)2022-08-29
成都信息工程大学学报(2021年5期)2021-12-30
空间科学学报(2021年4期)2021-08-30
中等数学(2020年2期)2020-08-24
天津农林科技(2020年3期)2020-08-13
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
电子制作(2019年15期)2019-08-27
电子制作(2019年14期)2019-08-20
党的生活·党员电教与远程教育(2017年9期)2017-10-17