炮塔转动参数检测系统设计
2019-10-31 04:14郭旻蔡振兴欧阳元兵
科教导刊·电子版 2019年24期
郭旻 蔡振兴 欧阳元兵
摘 要 目前炮塔转动参数检测方法存在测量精度偏低、操作复杂、抗干扰能力差的缺点,我们设计了一种基于MEMS惯性测量单元的炮塔转动参数测量系统,系统由ARM主控单元,MEMS惯性测量单元,WiFi模块,存储模块组成。通过在标准转台上的标定和在某型坦克上的实验,该系统满足测试精度要求,节省了人力物力,缩短了测量时间,满足实际应用的需求。
关键词 转动参数 非接触测量 微机电系统 炮控系统
中图分类号:TM935文献标识码:A
0绪论
炮塔是安装在装甲车、坦克、舰艇上的瞄准发射武器系统装置,能够围绕水平轴做360度无死角旋转,并且能够做45度角的俯仰运动,具有两个自由度。炮塔转动参数包括角速度量和角度量。目前测量方法主要有CCD点光源法、PSD光学测量靶法、光纤陀螺法、电测法等。这些测量方法在精度和测量灵活性上都有缺陷。我们设计了一种基于MEMS惯性测量单元的炮塔转动参数测量装置,用来弥补上述测量方法的不足,以满足实际需求。
1测量原理
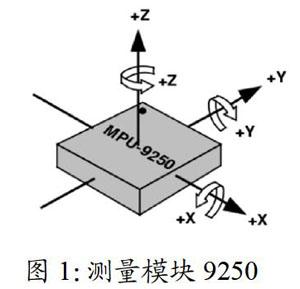
本系统主要测量的量是炮塔转动的角速度及角度,我们选用的惯性测量单元MEMS九轴传感器MPU9250。它包括三轴16位高精度AD组成的陀螺仪,三轴16位高精度AD组成的的加速度计与三轴6位磁力计,以及一个可扩展的数字运动处理器DMP。角速度的测量装置主要是陀螺仪,然后辅以加速计来进行修正。角度的测量是通过陀螺仪、加速计和磁力计测量的数据信息进行融合得到的,融合后的角度即是姿态角(如图1所示),即x轴的俯仰角Pitch、y轴的滚转角Roll、z轴的偏航角Yaw。测量时我们只需把传感器固定在炮管上,通过读取MPU9250输出的数据,即可得到炮塔转动的角速度及角度量,其中z轴得到的是炮塔水平方向的值,x轴得到的是炮塔垂直方向的俯仰值。
2系统方案设计
我们选用MEMS结构的惯性测量传感器件测量得到炮塔转动的角速度和角度数据,然后经由I2C通信总线传给测量单片机对数据进行转换和处理。处理运算完成的数据可就地存储,并经由无线模块将数据实时发給上位机进行显示。在整个测量过程中只需将测量装置放置在炮管上,不需要其他的辅助设备。MEMS惯性测量单元属于非接触式传感器,这种测量方式对现有方式有很大的创新改进,使得测量进行便捷灵活。测量数据的传输采用WiFi无线的形式,不需要硬件连线,便于在复杂、空间有限的调试现场进行测量。
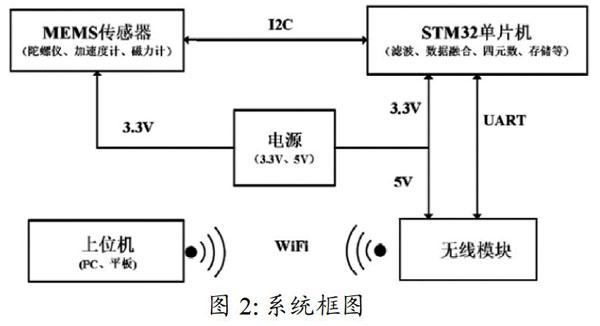
炮塔在测试机动性能时,炮管振动剧烈,而且一旦炮塔的驱动电机开启会带来很强的电磁干扰,这对测量上会产生很大的干扰,形成噪声。同时MEMS惯性测量传感器件也存在漂移的问题,积分会累计误差,所以得运用相应的滤波算法对数据进行处理。为了减小误差,选用多片MEMS惯性测量传感器件进行采集数据,然后对同一时刻多片陀螺仪所采的数据进行比对复合,数据的处理及测量传感器的驱动由ARM单片机完成。针对于不同的数据测量量采用不同的滤波方法,如角速度只需算术平均滤波便可以保证精度;而对于角度值测量,因为它的计算是由多个多轴传感器的数据进行融合运算得出,我们采用卡尔曼滤波进行处理,以达到精度要求。系统框图如图2所示。
2.1系统硬件设计
系统主控芯片选用STM32F103ZET6,测量模块为JY-901,模块集成MPU9250,采用高性能的微处理器和先进的动力学解算与卡尔曼动态滤波算法,能够快速求解出模块当前的实时运动姿态,姿态测量动态精度为0.1?s,静态精度位0.01度,稳定性极高。支持串口和I2C两种数字接口输出。串口速率2400bps-921600bps可调,I2C接口支持全速400K速率。
本装置采用无线方式与上位机通信,无线WiFi模块为HLK-RM04高性能、低成本UART-ETH-WIFI模块。该模块是基于通用串行接口的符合网络标准的嵌入式模块,内置TCP/IP协议栈,能够实现用户串口、以太网、无线网(WiFi)3个接口之间的转换。它能稳定可靠的把串口数据转成WiFi热点,并支持全双工工作模式。工作时只需用平板、手机、PC机等平台安装好专门开发的上位机便可能实现显示和控制。
装置在完成一次数据的测量后,会实时(下转第279页)(上接第268页)的将所测得的数据显示在上位机上。除了实时显示所测数据外,本装置自带有数据存储模块,要将每次测量的数据自动存储在TF卡中,这样便于后期对所测数据的分析和参数指标标定。
2.2系统软件设计
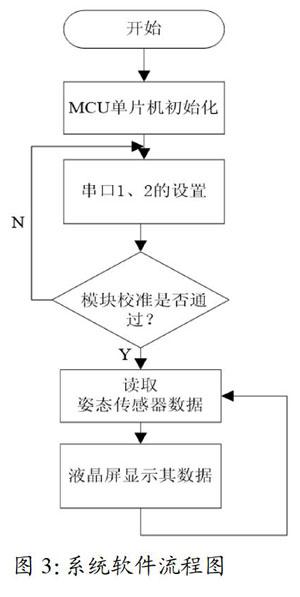
软件部分主要包含单片机的初始化、九轴MPU6050姿态传感器初始化以及数据读取等等,其中单片机的初始化包括时钟初始化、串口初始化时钟配置以及串口1和串口2的配置,所采用的语言是C语言,系统软件的设计主要是对算法解算、数据融合以及通过串口传输数据。系统的软件设计框图如图3所示。
3总结
我们所设计的基于MEMS惯性测量单元的炮塔转动参数测量系统,解决了传感器的零漂和测量数据的突变、波动问题。通过在标准转台上的标定和在某型坦克上的实验,该装置的测量动态精度为0.1?s,静态精度位0.01度,稳定性高。本装置操作简单、灵敏度高、成本较低、实用性强,能有效地提高测试精度,节省了人力物力,缩短了测量时间,满足实际应用的需求,具有很高的实用价值。
参考文献
[1] 张炎华,玉立端,战兴群,翟传润.惯性导航技术的新进展及发展趋势[J].中国造船,2008(10):134-140.
[2] 王春忠,杨忠国,荣明,王秋良,王钦钊.基于陀螺仪的坦克炮控稳定精度检测仪设计[J].传感器与微系统,2009,28(01):85-87.
[3] 李华,马晓军,臧克茂等.电传动坦克模糊控制器仿真研究[J].装甲兵工程学院学报,2002(06):45-49.
[4] 朱竞夫,赵碧君,王饮钊.现代坦克火控系统[M].北京:国防工业出版社,2003.