
宜宾高空站L波段雷达丢球分析研究
2019-10-30 03:49罗春丽马梅青李健英
中低纬山地气象 2019年5期
罗春丽,马梅青,李健英
(1.四川省宜宾市气象局,四川 宜宾 644000;2.四川省凉山州气象局,四川 西昌 615000)
0 引言
宜宾站自2009年1月1日起启动L波段雷达探测系统。由于地势限制,L波段雷达架设在距地15 m的楼顶上,气球施放瞬间雷达工作仰角达到-5.2°,易造成低仰角限位导致雷达自动跟踪失败。气球施放后短时间内从雷达天线上空正过顶时,该雷达因其仰角不能直接翻转180°进行跟踪,又受方位转速的限制,也会造成目标丢失。据统计,在实时探测过程中,由于雷达自动跟踪失败造成的高空探测资料缺失比例占2.1%~7.8%左右。如何获得及时准确的探测资料,特别是500 hPa气象资料的精准对天气预报有着至关重要的作用,保证探空资料的完整性、准确性已成为高空探测工作的重点。
1 L波段雷达丢球的原因
1.1 L波段雷达机械特性限制造成丢球
①仰角限位、方位限速丢球。其中仰角限位是因L波段二次测风雷达其仰角被限制在-6°~92°之间,当气球施放瞬间雷达仰角<-6°或气球过顶仰角>92°,雷达便无法自动跟踪,致使数据缺测。方位限速丢球,由于雷达角速度限制,无法跟上过顶气球的方位变化。
②雷达接收机模块有问题引起接收的探测信号弱和其它突发雷达故障造成天线乱转或不转等,致使的丢球问题。
1.2 受外部环境因素影响造成丢球
①第一分钟气球过顶。由于施放气球地点选择不当,致使丢球缺测。
②受电磁环境影响,有外界强干扰信号,导致接受机接收错误信号,致使丢球。
2 台站基本情况
宜宾高空站位于四川南部,海拔340.8 m,104°36′E,28°48′N,统计2009—2017年宜宾站使用L波段高空探测系统的资料,显示该站地面瞬时风盛行东北风,其次是东风,每年3—9月风速较大。下图为宜宾站多年地面风向玫瑰图。
宜宾站盛行东北风,放球场地应选在雷达安装点的西南面为最佳,但是由于周边环境的限制,达不到这样的要求,经过多方选址和论证,最后将放球场地定在距雷达90 m的东北偏东面(64°),另在雷达东南偏东面(107°)设置了第二放球点,基本满足L波段雷达测风系统的要求。由于测站周围遮挡物较多,还有地面观测场风杆等,为了满足雷达天线的仰角跟踪条件,雷达天线建在距地15 m高的楼顶上,雷达负仰角>6°。

图1 宜宾气象站2009—2017年地面风向玫瑰图Fig.1 Rose chart of surface wind direction from 2009 to 2017 at yibin meteorological station
3 宜宾站L波段雷达低空历年丢球数据统计分析
统计历年宜宾L波段雷达测风失测资料,发现测风低空失测原因主要有以下3种:①气球施放后20 s左右,因雷达高仰角限位导致自动跟踪失败;②气球施放前雷达天线偏离目标导致旁瓣跟踪;③气球施放瞬间雷达低仰角限位致使低空失测。各类测风失测比例见表1。
4 宜宾站L波段雷达仰角限位丢球分析
仰角限位可分为高仰角限位和低仰角限位。
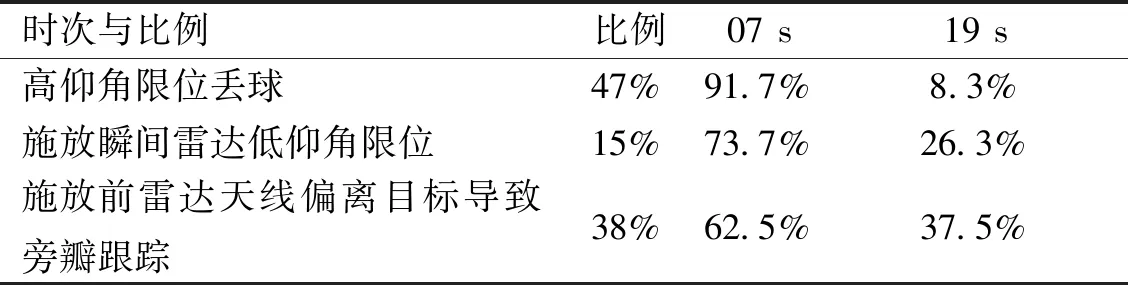
表1 2009—2017年宜宾高空站测风低空失测统计Tab.1 Wind loss at low altitude measured at yibin upper air station during 2009—2017
高仰角限位,即雷达天线仰角>92°时,雷达天线出现限位。低仰角限位,即雷达天线仰角<-6°时,雷达天线出现限位。
4.1 高仰角限位丢球分析
从2010年1月27日19时球坐标秒数据(如表2)可以看出24 s后,即仰角>92°,仰角、方位数据混乱,测风数据出现了跳变现象,不符合雷达主瓣定向时仰角、方位角变化的特点。同时从风随高度的变化曲线数据图(如图2)可以看出该时次5 000 m以下的风向、风速跳变大且不连续。可见,此次低空测风资料因雷达高仰角限位而缺测。

表2 高仰角限位时每秒球坐标数据Tab.2 Spherical coordinate data per second at high elevation limit
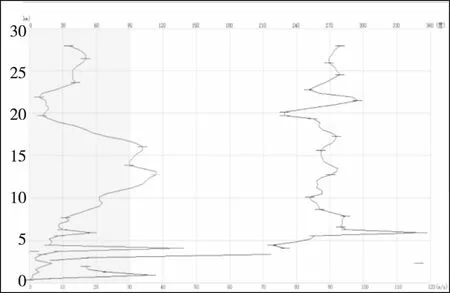
图2 风随高度变化曲线Fig.2 Wind variation curve with height
4.2 低仰角限位丢球分析
低仰角限位,即雷达天线仰角<-6°时,雷达天线出现死位现象。表3(2014年4月13日07时的测风数据)的球坐标秒数据中表明气球施放后第1~11 s仰角读数几乎不变,第5 s方位有明显的跳变现象,斜距及高度数据异常,量得风层8.5分出现了39 m/s的大风(表4)。可见,此次低空测风资料因雷达低仰角限位而缺测。

表3 施放瞬间雷达低仰角限位Tab.3 Low elevation limit of the radar at the moment of casting

表4 2014年4月13日07时量得风层风向、风速异常Tab.4 Abnormal wind direction and speed in the wind layer
分析当时次记录发现,地面瞬时风为西北风,7 m/s,较大的风速使气球在空中摆动幅度大,造成雷达天线在气球施放瞬间因仰角过低而限位。
5 气球施放前雷达天线偏离目标物丢球分析
此类情况多发生在雨雾天、冬季早晚探测时段,因能见度差,放球前在摄像头画面里看不到球影,此时若雷达天线偏离目标物不易察觉。
例如2015年2月18日07时的球坐标秒数据(表5)表明在气球施放前雷达天线未对准探空仪,仰角偏离角度为12.58°,方位偏离角度为6.52°,而值班员未能第一时间发现天线已偏离目标物,气球脱手后导致雷达旁瓣跟踪。L波段雷达的水平、垂直波瓣宽度均不大于6°,目标丢失后不易找回,旁瓣定向表现为高差报警,探空信号不清,仰角、方位数据无规律,量得风层的风向混乱,风速时大时小,明显看出雷达没有跟踪到目标物,属于丢球记录。(详见表6)。

表5 气球施放瞬间雷达天线偏离放球点Tab.5 Radar antenna deviates from the ball release point at the instant of balloon release

表6 2015年2月18日07时量得风层风向、风速异常Tab.6 abnormal wind direction and speed in the wind layer
6 对策与建议
①高仰角限位丢球,根据宜宾探空站多年的经验,在保证正确选择气球施放点(即下风方向)情况下,当出现限位报警时,立即将天控自动开关转换为手动,通过控制操作杆,让“四条亮线”始终保持四条亮线平齐,待仰角<90°时,再将天控开关转换为自动跟踪状态,从而保证气球过顶时不出现丢球现象。
②低仰角限位丢球,多由于地面瞬时风速过大导致。遇大风天放球,应使用大风放球器,通过不断的实验和总结,宜宾站在使用大风放球时,采用先手动后自动的方法避免由于仰角过低导致雷达限位,即气球脱手后1~2 s时先通过手控盒上的操纵杆手动跟踪气球,等探空仪升到一定高度之后,立即将天控切换为“自动”状态,实现雷达自动跟踪。此方法不但能有效避免雷达因过低的仰角限位,也可使雷达天线少受磨损。宜宾站在地面风速较大时多次采用此方法施放气球,获得了良好的效果。
③对于施放气球前雷达天线已经偏离目标物的情况,需值班员要养成“眼快手慢”的习惯,“眼快”指随时注意放球软件的仰角、方位角显示区,气球施放前天控开关处于“自动”状态时,雷达天线应对准探空仪,仰角、方位读数有微小变化,但与放球点仰角、方位读数差值很小,表明天线自动跟踪目标,可以施放气球。“手慢”指放球前若发现仰角、方位显示区的读数不是放球点的仰角、方位读数,说明天线已经偏离探空仪,此时切不可因慌乱而误点了放球界面的“确定”按钮造成旁瓣定向。应取消“放球”功能,天控开关转为“手动”,将天线重新摇回放球点位置,调节雷达频率,使四条亮线火柴头饱满,凹口清晰,确定天线能自动跟踪后方可放球。
④在常规探测过程中,L波段雷达接收机均处于增益自动状态,当遇到丢球情况时,无论是何种原因导致的丢球,都可以采用“增益手动”状态下人工追踪寻找气球的方法。具体操作如下:当发现丢球时,首先将“增益”开关打到手动状态,并将增益值手动调整到95左右,让信号接近饱和;示波器显示为“四条亮线”的角度跟踪显示方式,通过控制操作杆,手动摇天线,当观察到示波器显示四条亮线中有两条亮线长度最长达到满屏时,微摇天线,使天线向亮线短的方向转动直到四条亮线长度均达到满屏,立即将天控及增益开关切换为自动状态,观察频率是否较小,四条亮线是否平齐,再用“天线扇扫”功能进行扇扫,此时如果仰角方位数据不再跳变,表明已经找回目标物,这时将探空乱点去掉,将斜距凹口对准,高差不再报警。
7 结论
①宜宾探空站低空丢球主要原因是由于高仰角限位和施放气球瞬间雷达偏离放球点导致的旁瓣跟踪。
②宜宾站L波段雷达低仰角限位卡死现象,多由于地面瞬时风速过大导致。
③据2009—2017年宜宾站探空资料统计,宜宾站地面瞬时风多盛行东北风,其次是东风。宜宾站的放球场地应选择在L波段雷达架设点的西南面。
猜你喜欢
中国特种设备安全(2022年6期)2022-09-20
汽车实用技术(2022年16期)2022-08-31
初中生世界·九年级(2020年2期)2020-04-10
哈尔滨轴承(2020年4期)2020-03-17
四川蚕业(2020年4期)2020-02-10
岷峨诗稿(2019年4期)2019-04-20
岷峨诗稿(2017年4期)2017-04-20
科技视界(2016年15期)2016-06-30
汽车零部件(2014年9期)2014-09-18
大众考古(2014年10期)2014-06-21
