基于RFID反向散射的标签定位实验平台
2019-10-29 00:27:36陈鸿龙李宪敏代天骄
实验技术与管理 2019年10期
陈鸿龙,李宪敏,代天骄,孙 良
基于RFID反向散射的标签定位实验平台
陈鸿龙,李宪敏,代天骄,孙 良
(中国石油大学(华东)信息与控制工程学院,山东 青岛 266580)
介绍了基于测距定位方法的基本工作原理,设计了一套基于射频识别反向散射的标签定位实验平台。该实验平台包括1个后端服务器、1台英频杰阅读器、多个RFID天线和1个标签。RFID天线的位置已知,作为信标节点并由阅读器控制,标签位置未知。由天线发送射频信号,信号到达标签后经反向散射返回天线,阅读器测得射频信号经由传输路径的相位变化,基于射频信号的传输模型估计天线和标签之间的距离,并结合天线的位置信息,利用极大似然估计方法估计标签的位置信息。该实验平台涵盖了射频通信、信号分析和处理以及定位算法等内容,有助于学生深入学习和理解基于RFID定位方法的原理和应用,能够培养和提高学生针对复杂工程问题的创新能力和工程实践能力。
射频识别;反向散射;相位;极大似然估计
物联网[1-2]是指通过信息传感设备,按照约定的协议,把物品和互联网连接起来,进行信息交换和通信,实现智能化识别、定位、跟踪、监控和管理的一种网络。近年来物联网技术的发展日新月异,取得了许多重大突破并得到广泛应用[3-4]。射频识别(RFID)[5]技术作为物联网的关键核心技术之一,目前已经被广泛应用于石油石化、仓储管理和物流追踪等领域,并取得巨大的经济效益。例如,将RFID系统应用于高校实验室的实验设备管理[6],通过实现对RFID标签的监测即可实现对实验设备的快速的、高效的以及可靠的自动化管理,大大提高实验室的运行效率。
在物联网的应用中,感知层中的节点通过传感器采集相关感知信息,并经过传输层将感知信息传输到应用层,进行数据处理、分析和应用。但是,在许多应用中,每个节点的感知信息和其自身位置信息是紧密关联,缺一不可的。例如,在城市空气质量监测系统中,缺乏位置信息的空气质量感知信息,其可信度和可用性将大打折扣。因此,节点精确定位对物联网的进一步发展和应用至关重要。
本文所设计的基于RFID反向散射的标签定位实验平台,通过测得天线与无源标签之间的距离,利用极大似然估计方法实现标签的定位。该实验平台有助于学生深入学习和理解RFID系统的工作原理以及基于RFID的定位方法的原理和应用,有助于培养学生针对复杂工程问题的创新能力和工程实践能力[7],助力学生今后职业技能的提升。
1 基于测距的节点定位方法
物联网中的节点定位方法[8-9]通常分为基于测距的和距离无关的两大类。网络中的节点由信标节点和未知节点组成,信标节点指自身位置信息已知的节点,未知节点则是位置信息未知的节点。测距的定位方 法[10-11]是通过测量未知节点与多个信标节点间的距离[12],进而估计未知节点的坐标。距离无关的定位方法[13]则可间接获得未知节点和信标节点之间的参数关系以实现定位。两种方法各有适用场合,一般情况下,基于测距的定位方法的定位精度高于距离无关的定位方法。

其中,

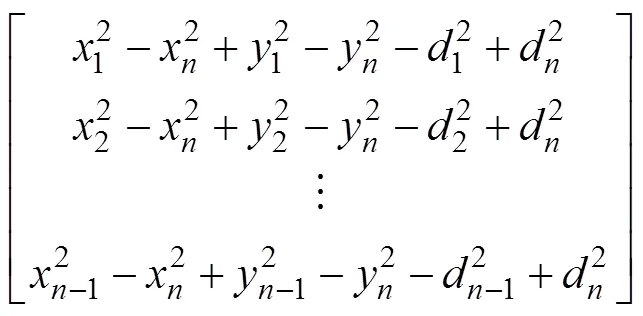
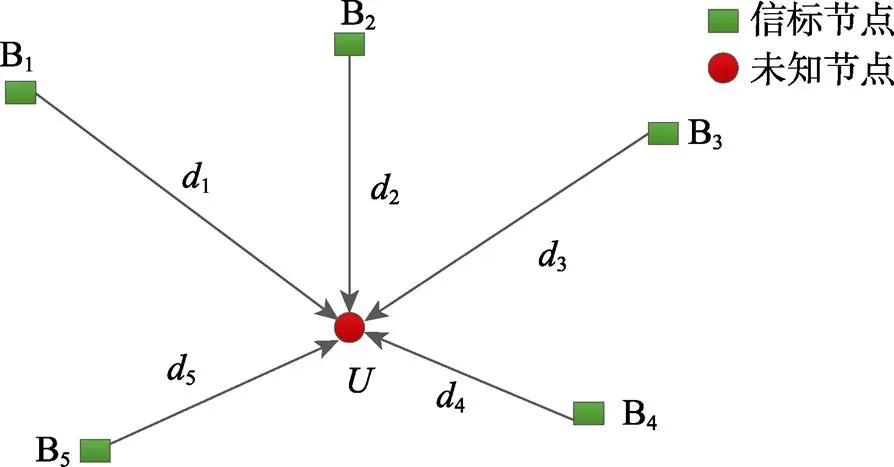
图1 基于测距的定位方法示意图
2 RFID系统
RFID系统主要由3部分组成:(1)阅读器:可以读取(或写入)标签信息的设备,其工作模式一般是主动向标签询问信息;(2)标签:由耦合元件及芯片组成,每个标签具有唯一的电子编码,附着在物体上,用来标识目标对象,标签根据是否内置电源分为无源标签、有源标签和半有源标签,本实验平台将以无源标签作为定位目标;(3)天线:在标签和阅读器之间传递射频信号,其大小与工作频率及功能有关。
在RFID系统中,阅读器由后端服务器控制,通过天线发射射频信号,标签接收到射频信号后发射内部存储的标识信息,并由阅读器经天线接收,最后阅读器将识别结果发送给后端服务器。电子标签与天线之间通过射频信号耦合实现能量和数据传输。如图2所示,本实验平台分别采用英频杰R420阅读器、Laird9028超高频天线和英频杰 H41电子标签。

图2 实验平台采用的RFID设备
3 基于RFID反向散射的标签定位实验平台
本文构建的标签定位实验平台结构如图3所示,该平台包括1台后端服务器,1台阅读器,4个天线以及1个无源标签。4个天线的位置已知,作为信标节点,无源标签位置未知,作为未知节点。阅读器可以通过有线链路与后端服务器通信并由它控制。天线发送射频信号,信号到达标签后反向散射、返回天线,由阅读器测得射频信号在传输路径中的相位变化,根据相位变化得到未知标签和天线之间的距离,并结合天线的坐标信息,利用极大似然估计法求得未知标签的坐标。

图3 标签定位实验平台结构图




图4 RFID系统的射频信号反向散射原理图
利用图2中的RFID设备搭建的实验平台,其天线工作频率为920.625 MHz,通过实验可以得出标签和天线之间的距离在半波长(约为16.5 cm)内与相位值呈现线性关系,如图5所示。基于上述距离和相位之间的线性关系,阅读器在得到相位信息后即可估计天线和无源标签之间的距离。
标签定位实验平台的原型系统如图6所示,在测量区域部署4个天线A1、A2、A3、A4,天线的位置信息已知,作为信标节点;无源标签位置信息未知,为未知节点。阅读器计算无源标签和4个天线之间的距离,结合4个天线的坐标信息,利用极大似然估计法和公式(1),即可实现对无源标签的定位。

图5 标签和天线之间的距离和相位关系曲线

图6 标签定位实验平台现场部署图
4 标签定位实验平台的教学应用
目前,我校自动化和测控两个本科专业每个年级学生约200人,这两个专业的学生在三、四年级开设了物联网控制技术和无线传感网络两门课程,分别介绍物联网和无线传感器网络的基本原理、关键技术和应用,每门课程分别包含8个实验学时。本文所设计的基于RFID反向散射的标签定位实验平台将服务于今后的物联网控制技术和无线传感网络课程的教学,学生通过结合该实验平台的实验内容,能够更深层次地理解和掌握课程中所介绍的RFID射频通信以及节点定位原理。
5 结语
本文以提高专业课课程建设质量为出发点,设计了一套基于RFID反向散射的标签定位实验平台,通过测量射频信号反向散射的相位变化估计天线和标签之间的距离,利用极大似然估计方法估计标签的位置。该实验平台涵盖了射频通信、信号分析和处理以及定位算法等内容,可服务于自动化和测控两个专业的物联网控制技术和无线传感网络两门课程,有助于学生深入学习和理解基于RFID定位方法的原理和应用,有助于培养学生针对复杂工程问题的创新能力和工程实践能力,助力学生今后职业技能的提升。
[1] 车辚辚,孔英会,赵建立,等.基于物联网的智慧实验室设计[J].实验技术与管理,2013, 30(10): 212–215.
[2] 朱耀勤,郑成武.基于物联网技术的实训实验室建设[J].实验技术与管理,2017, 34(3): 232–236.
[3] 陈鸿龙,涂玲,孙良,等.基于无线传感器网络的抽油机监控实验平台[J].实验技术与管理,2014, 31(9): 95–97.
[4] 陈鸿龙,杨玉斌,田力丹,等.基于物联网的抽油机群远程监控实验平台[J].实验技术与管理,2016, 33(2): 114–116.
[5] 张士庚,刘光亮,刘璇,等.大规模RFID系统中一种能量有效的丢失标签快速检测算法[J].计算机学报,2014, 37(2): 434–444.
[6] 辛良,申建,表冠. RFID+二维码设备标签管理系统构建[J].实验技术与管理,2019, 36(1): 278–282.
[7] 刘杨,蒋文明,陈树军,等.基于响应面的电絮凝除乳化油研究[J].实验室研究与探索,2018, 37(12): 9–24.
[8] 王福豹,史龙,任丰原.无线传感器网络中的自身定位系统和算法[J].软件学报,2005, 16(5): 857–868.
[9] 陈鸿龙,王志波,王智,等.针对虫洞攻击的无线传感器网络安全定位方法[J].通信学报,2015, 36(3): 1–8.
[10] 徐盛良,鲁照权,周永燕,等.基于信号强度与超声波测距的室内定位系统[J].仪表技术与传感器,2019(1): 91–96.
[11] 吴绍华,张乃通.室内信道环境下UWB精确测距研究[J].通信学报,2007, 28(4): 65–71.
[12] 李哲涛,李仁发,魏叶华.无线传感器网络中时间同步与测距协同算法[J].计算机研究与发展,2010, 47(4): 638–644.
[13] 肖竹,陈杰,王东,等.严重遮挡非视距环境下的三维定位方法[J].通信学报,2015, 36(8): 1–8.
Experimental platform for label location based on RFID backscattering
CHEN Honglong, LI Xianmin, Dai Tianjiao, SUN Liang
(College of Information and Control Engineering, China University of Petroleum, Qingdao 266580, China)
This paper introduces the basic working principle of the ranging and positioning method and designs a label positioning experimental platform based on radio frequency identification backscattering. The experimental platform includes a back-end server, an English band reader, multiple RFID antennas and a tag. The location of the RFID antenna is known. As the beacon node and as controlled by the reader, the location of the tag is unknown. The radio frequency signal is transmitted from the antenna and returned to the antenna by backscattering after arriving at the tag. The reader measures the phase change of the radio frequency signal through the transmission path, and estimates the distance between the antenna and the tag based on the transmission model of the radio frequency signal. Combined with the position information of antenna, the position information of tag is estimated by maximum likelihood estimation method. The experimental platform covers radio frequency communication, signal analysis and processing, and location algorithm. It is helpful for students to deeply understand the principle and application of location method based on RFID, and it can also cultivate and improve students’ innovative ability and engineering practice ability for complex engineering problems.
radio frequency identification; backscatter; phase; maximum likelihood estimation
TN925
A
1002-4956(2019)10-0092-03
10.16791/j.cnki.sjg.2019.10.022
2019-03-07
国家自然科学基金面上项目(61772551);山东省重点研发计划(2018GGX101035);中国石油大学(华东)校级教改项目(JY-B201833)
陈鸿龙(1984—):男,福建泉州,副教授,博士生导师,计算机科学博士,研究方向为物联网。E-mail: chenhl@upc.edu.cn
猜你喜欢
电子设计工程(2022年15期)2022-08-17 10:07:04
汽车工程师(2021年12期)2022-01-17 02:29:46
军民两用技术与产品(2021年12期)2021-03-09 05:38:30
电子制作(2019年12期)2019-07-16 08:45:14
东北师大学报(自然科学版)(2018年3期)2018-09-21 09:06:36
北京航空航天大学学报(2017年6期)2017-11-23 05:57:06
电子制作(2016年1期)2016-11-07 08:42:54
腹腔镜外科杂志(2016年9期)2016-06-01 12:10:07
互联网天地(2016年2期)2016-05-04 04:03:23
现代计算机(2015年17期)2015-09-26 02:01:54