
白鹤滩水电站左岸主厂房桥机防碰撞管理存在的风险及对策
2019-10-29 06:34:46孙博闻杨广渝
中国水利 2019年18期
孙博闻,杨广渝
(长江三峡技术经济发展有限公司,615400,凉山)
白鹤滩水电站地下厂房施工现场条件复杂,土建与金结施工交叉作业较多,大件吊装频繁,桥机与桥机之间、桥机与其他物体之间碰撞风险较大,为了保证1300 t桥机安全稳定运行,需对存在的风险进行分析管控并采取相应的防碰撞措施。
一、存在的碰撞风险
1.共轨桥机相互之间的碰撞风险
左岸主厂房目前已布置3台桥机在岩锚梁上共轨运行(图1),从北到南依次有1台QD1300/160 t桥机、1台QD160/160 t桥机以及1台50/25 t桥机。2019年6月,为了满足机电大件吊装需求,另有1台QD1300/160 t桥机将安装于上述3台桥机的最北侧。因此,届时会有4台(套)桥机在岩锚梁上共轨运行。在多台桥机同时运行时,可能出现由于缺乏统一指挥或信号工指挥失误导致的碰撞风险。单台桥机运行时,可能出现由于限位或制动装置失灵或者人为误操作导致运行中的桥机与其余桥机碰撞的风险。
2.桥机与顶拱台车相互之间的碰撞风险
在厂房岩壁梁上设有3台厂房顶拱台车,用于厂房吊顶施工。厂房顶拱安全台车设计为近拱形钢结构台车形式,安装高程 EL609.45,利用厂房吊顶支撑柱上布置的钢牛腿及型钢轨道梁作为支撑。第一台台车中心跨度31.9 m,台车宽度 7.5 m;第二台和第三台台车设计跨度31.98 m,台车承载主梁间距6.65 m,顶部平台宽度8 m。现厂房顶拱加强支护已施工完成,已启动顶拱吊顶钢结构安装施工,由于台车承载主梁与1300 t大桥机小车卷筒干涉,桥机与顶拱台车相互之间有碰撞风险。
3.桥机与其他物体之间的碰撞风险
除了共轨桥机与顶拱台车外,桥机运行过程中仍有可能与厂房中其他设备发生碰撞。桥机起重作业时,吊钩下方可能与厂房内的柱式布料机以及安装间座环转轮安装平台等地面设备发生碰撞。
二、应对对策
1.主动措施
(1)成立管理组织机构
从过往的事故分析来看,大多数事故发生的根本原因是管理不当造成的。因此,制定一个有效的管理机制并长期有效地执行是最佳对策。
首先成立一个专业的桥机运行管理小组(包括生产调度人员、安全管理人员、后勤保障人员、检修人员、桥机司机、起重指挥人员、吊装作业人员等),全面贯彻落实责任主体制度,明确各人员的职责:
①小组长职责。小组长由负责生产调度人员任职,全面负责协调桥机的生产调配、过程协调、与设备厂家的联系等。
②各成员职责。安全管理人员:负责桥机的日常安全检查、定期检查,负责司机的证件管理、保持与当地安全和医疗机构的联系、事故调查及处理等。后勤保障人员:负责桥机检修、维修所需物资的采办。检修人员:桥机发生故障后负责进行及时维修,确保设备正常运行。桥机司机:负责桥机的日常运行维护保养、填写相应的记录,如运行记录、维护保养记录、交接班记录等。吊装作业人员:负责桥机吊装器具的日常维护保养。起重指挥人员:负责起重信号指挥。
(2)管理措施
①对人的管理。特种作业人员(桥机司机、起重吊装作业人员)必须取得特种作业操作证且在有效期限内方可上岗。其他管理及辅助人员须经培训合格后上岗,并且熟悉本桥机的用途、性能、操作方法、桥机所在区域内的环境条件。 检修人员要求有3年以上起重设备检修经验。
②对设备设施的管理。一是对共轨的桥机进行编号。二是在进入桥机前的明显位置标识各桥机的状态,包括运行、检修、故障等警示标志,防止非操作及检修人员进入桥机运行区域。三是加强日常检修及维护,防止限位装置、报警系统发生故障导致失灵。
③规范操作规程。一是桥机开机前,应检查安全装置(防撞感应装置、警示装置、物理防撞装置、限位装置)是否正常,并填写检查记录。二是桥机开机前,桥机司机应确认桥机运行区域及桥机本体内是否有人员进入。三是桥机开机前,桥机司机应确认桥机运行区域内是否有影响桥机运行的障碍物或其他交叉施工项目。四是桥机每次开动前,必须发出开车警告信号,并确认警示装置运行正常。五是吊装作业前确保司机与吊装作业人员的通信设备运行正常。六是严禁违章指挥、违章吊装作业。七是桥机运行过程中司机应随时观察其他桥机与本桥机的相对位置。八是桥机空载运行时,应将桥机的吊钩上升至上极限位置后方可水平运行,以防止与地面设备发生碰撞。九是桥机吊装作业时,起重吊装人员应测量吊钩至吊物底部的距离保证其在安全范围内。
(3)其他主动措施
针对桥机与台车之间可能发生的碰撞风险,采用加装垫块的方式将#2台车抬高200 mm,至桥机主小车在主梁中间位置时可安全通过的台车底部。
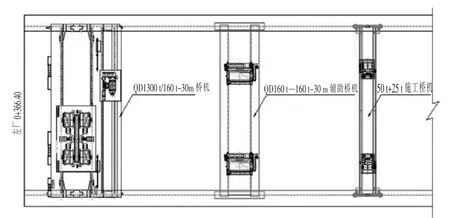
图1 主厂房桥机布置图
2.被动措施
(1)机械防撞措施
①轨道两端设置车挡。按照设计图纸,安装主厂房上、下游岩锚梁两端车挡,可有效防止桥机与两端墙岩壁碰撞。
②设置缓冲器。通过桥机自带的限位系统设置合适的限位可使桥机运行至极限位置前自动减速停车,防止碰撞。通过桥机前后、两侧设置的缓冲器,可有效吸收碰撞动能,达到安全保护作用。
(2)激光防撞措施
当桥机在3档及以上的速度运行时,过大的动量使传统的机械缓冲器已无法有效地进行保护,此时具有无触点限位的激光防撞装置就必不可少。
①激光防撞装置。整套装置由激光防撞雷达、自动化控制报警箱、反射靶组成。
激光防撞雷达工作原理见图2。由激光器调制电源向激光器提供脉冲电流,激光器产生的激光通过光学系统形成平行的光束射向防撞物或起重机的反射靶上。反射回来的激光由光学系统汇聚在光电探测器上,产生的电信号经高灵敏度放大器转为报警控制信号,接通控制报警箱电源,发出警报。
控制报警箱工作原理见图3。当激光防撞雷达的控制信号接通控制报警箱的电源后,产生声光报警信号。如控制报警箱发出声光报警信号,操作人员未采取制动措施,控制报警箱通过接入桥式起重机电路的继电控制系统产生制动信号,使起重机自动制动。
反射靶是一块光幕,它是在具有高反射率的材料(如铝箔)上喷涂一层玻璃微珠制成,其特点是具有较强的反射率和定向反射性。当激光照射到靶面上时,它以锥反射形式沿入射方向将激光反射。不但能克服由于桥式起重机歪斜运行造成的反射靶与雷达相对位置的偏差,也简化了安装调试工作。
②激光防撞装置的应用。激光防撞雷达安装在桥式起重机两侧端部平台上,激光发射镜对向另一桥式起重机或防撞目标物,防碰撞控制报警箱安装在操作室内,反射靶安装在另一桥式起重机或防撞目标物的相应位置上。 当两台起重机运行到预定报警位置时,激光投射到反射靶上部,控制报警箱开始报警。当桥式起重机运行到大于预定报警距离时,停止报警。整套装置具有测程远、精度高、抗干扰能力强以及高度自动化等优点,能够保证桥机在复杂环境下安全运行。

图2 激光防撞雷达工作原理框图
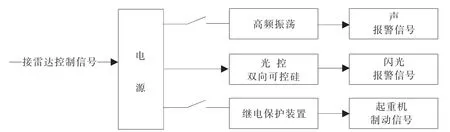
图3 控制报警箱原理框图
三、结 论
做好桥机防碰撞管理工作,关键是建立健全组织机构、完善防碰撞管理制度及桥机本身的运行维护制度,加强对专职操作及管理人员的培训及交底,同时要运用先进的自动化防碰撞设备。
猜你喜欢
山东冶金(2022年2期)2022-08-08 01:51:54
集装箱化(2022年1期)2022-03-05 23:09:29
中国特种设备安全(2021年5期)2021-11-06 05:09:38
昆钢科技(2020年6期)2020-03-29 06:39:32
小哥白尼(趣味科学)(2018年12期)2018-12-18 02:13:58
汽车工程师(2018年1期)2018-07-13 00:47:56
中国公路(2017年13期)2017-02-06 03:16:33
工业炉(2016年1期)2016-02-27 12:34:13
民用飞机设计与研究(2015年3期)2015-12-07 12:09:31
汽车科技(2015年1期)2015-02-28 12:14:54
